手撕ResNet50简易速学复现,深度学习入门必备+面试利器
参考资料:
[1] ResNet手写代码实现
[2]ResNet50复现笔记
适合对象:对pytorch和torch.nn工具使用已经有一定的了解,对resnet框架和原理基本熟悉,本教程简单快速速通resnet全流程,帮助算法岗面试 / 进一步提高工程能力。
本教程为微调其他大佬代码而来,完全按照论文中的参数配置,调通无bug
ResNet50参数配置:
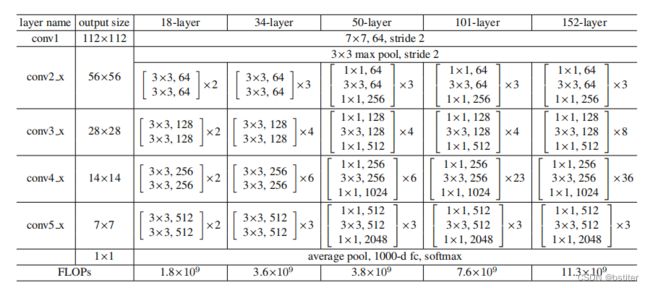
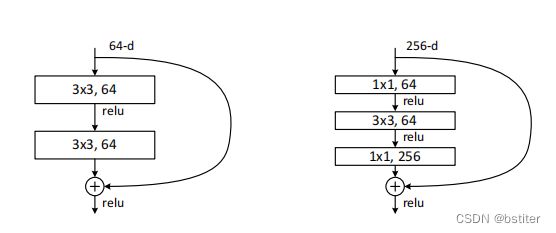
其中resnet50的每一个block结构如下图右所示:
复现时注意的点:
- 每个stage(表中除conv1外包含4个stage)都是由上图block重复若干次构成,仅在于out_channels不同。每个stage的第一个block为 自定义的stride,后几个block固定stride=1
- 四个stage的自定义stride = [1, 2, 2, 2]
- ResNet50以下的,每个block包含3,3两个核,out_channels维持不变。ResNet50及以上的,每个block包含1, 3, 1三个核,注意第三个核的out_channels变为4倍,放进下一个重复的block时,输入维度要注意转换
ResNetBlock (或叫BottleNeck)
import torch
import torch.nn as nn
class ResNetBlock(nn.Module):
def __init__(self, inp_c, out_c, stride=1):
super(ResNetBlock, self).__init__()
self.block = nn.Sequential(
nn.Conv2d(inp_c, out_c, 1, stride=stride),
nn.BatchNorm2d(out_c),
nn.ReLU(),
nn.Conv2d(out_c, out_c, 3, stride=1, padding=1),
nn.BatchNorm2d(out_c),
nn.ReLU(),
nn.Conv2d(out_c, out_c * 4, 1, stride=1), # resnet50以上,最后一个kernel的channel提高4倍
nn.BatchNorm2d(out_c * 4),
nn.ReLU()
)
self.downsample = None
if stride != 1 or inp_c != out_c * 4: # 将输入调整至与output一致尺寸
self.downsample = nn.Sequential(
nn.Conv2d(inp_c, out_c * 4, 1, stride=stride),
nn.BatchNorm2d(out_c * 4)
)
def forward(self, x):
residual = x
out = self.block(x)
if self.downsample != None:
residual = self.downsample(x)
out += residual
return out
ResNet50
class ResNet(nn.Module):
def __init__(self, layers, num_classes=1000):
super(ResNet, self).__init__()
self.in_channel = 64
# stem, 即表格中的conv1,将3通道转换至64
self.stem_block = nn.Sequential(
nn.Conv2d(3, self.in_channel, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(self.in_channel),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
# stage
self.stage1 = self.make_layer(ResNetBlock, 64, layers[0], stride=1)
self.stage2 = self.make_layer(ResNetBlock, 128, layers[1], stride=2)
self.stage3 = self.make_layer(ResNetBlock, 256, layers[2], stride=2)
self.stage4 = self.make_layer(ResNetBlock, 512, layers[3], stride=2)
# 后处理:1000分类
self.avg_pool = nn.AvgPool2d(7)
self.fc = nn.Linear(512 * 4, num_classes)
def make_layer(self, block, out_c, num_blocks, stride):
stride_list = [stride] + [1] * (num_blocks - 1) # 自定义stride + 固定1
block_list = []
for stride_ in stride_list:
block_list.append(block(self.in_channel, out_c, stride=stride_))
self.in_channel = out_c * 4 # 上面输出的维度已不是out_c, 而是out_c * 4
return nn.Sequential(*block_list)
def forward(self, x):
# stem
out = self.stem_block(x)
# stage
out = self.stage1(out)
out = self.stage2(out)
out = self.stage3(out)
out = self.stage4(out)
# post-process
out = self.avg_pool(out)
out = torch.flatten(out, 1)
out = self.fc(out)
return out
主函数
def main():
input = torch.rand(4, 3, 224, 224) # batchsize=4, channel=3, 224*224
net = ResNet([3, 4, 6, 3]) # 四个block的重复数
output = net(input)
print(output.shape)
if __name__ == '__main__':
main()
输出
torch.Size([4, 1000])