【论文速读】RandLA-Net大规模点云的高效语义分割
点云PCL免费知识星球,点云论文速读。
文章:RandLA-Net: Efficient Semantic Segmentation of Large-Scale Point Clouds
作者:Qingyong Hu1, Bo Yang1, Linhai Xie1, Stefano Rosa1, Yulan Guo
翻译:北理工苏同学
本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈分享快乐。
论文阅读模块将分享点云处理,SLAM,三维视觉,高精地图相关的文章。公众号致力于理解三维视觉领域相关内容的干货分享,欢迎各位加入我,我们一起每天一篇文章阅读,开启分享之旅,有兴趣的可联系微信[email protected]。
●论文摘要
文章解决大场景下的高效率点云语义分割,因为依赖于昂贵的采样方法和复杂的预/后处理步骤,现存的方法只能操作小尺度的点云。我们提出的RandLA-net,是一个轻量级的对大尺度点云的高效分割网络。我们采用了随机采样而不是更复杂的采样策略,但是随机采样可能会丢失一些关键特征,为了解决这个问题,引入了一个全新的局部特征聚合模块来渐进地增加每一个点的感受野,因此保存了几何细节。实验证明我们的方法比现存方法快200x,在Semantic3d以及SemanticKITTI数据集上超越了SOTA的方法。
● Introduction
在Pointnet使用share MLPS对点云进行处理,但是其无法获得更广泛的上下文信息(只有全局信息,而没有局部信息),为了学习更丰富的局部结构,许多专用的模块被提出
neighboring feature pooling
graph message passing
kernel-based convolution
attention-based aggregation
这些方法其中的大多数只能针对非常小的点云(e.g., 4k points or 11 meter
blocks),如果不使用block partition等预处理操作,不能应用于大场景的点云(200*200m)。这个限制的原因主要有三点:
采样方法太复杂
大多数现有的局部特征学习模块依赖于核或者图结构,这些是很花费计算资源的
大尺度的场景有上百个物体,因为感受野(receptive fields)的限制,现存的方案要么不能捕获复杂的结构要么计算效率低下。
也有一些工作直接处理大规模点云,SPG现将点云处理为超图(super point)然后再应用于神经网络去学习每一个超点的语义标签;FCPN和PCT联合voxellization和point-leavel的网络去处理庞大的点云。因为他们的预处理或者后处理太复杂,很难在实时设备上部署。
在这篇文章中,作者提出直接处理大尺度点云的方案,不需要预处理/后处理,使用的随机采样,RS,为了解决随机采样的特征丢失问题,引入了局部特征聚合模块,LFA,通过逐渐地在每个神经层扩大感受野,以捕获越来越小的点集上的复杂局部结构。
●RandLA-Net
In our RandLA-Net, we propose to use the simple and fast approach of random sampling to greatly decrease point density, whilst applying a carefully designed local feature aggregator to retain prominent features.

The quest for efficient sampling
现存的采样方法主要有Heuristic Sampling
* Farthest Point Sampling (FPS)
* Inverse Density Importance Sampling (IDIS)
* Random Sampling (RS)
Learning-based Sampling
* Generator-based Sampling (GS)
* Continuous Relaxation based Sampling (CRS)
* Policy Gradient based Sampling (PGS)
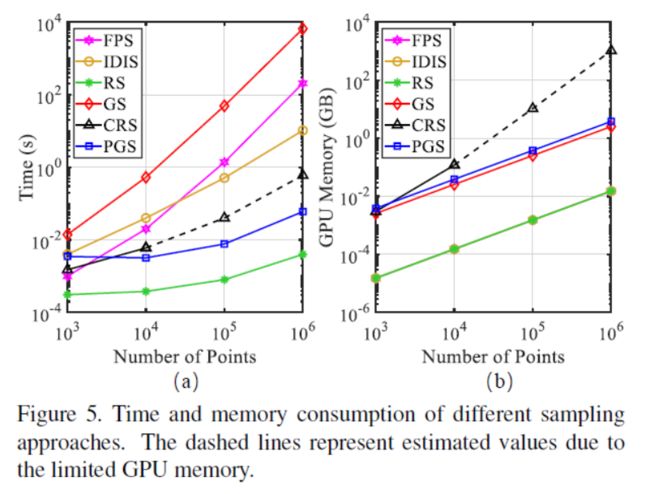
作者比较了以上的6种方法,发现:
FPS, IDIS and GS are too computationally expensive to be applied for large-scale point clouds,CRS approaches have an excessive memory footprint and PGS is hard to learn.
相比之下,RS具有以下优点:
1、它非常高效,因为它与输入点的总数无关。
2、它不需要额外的内存来进行计算。
因此选择RS作为采样模块,但是RS会丢失一些点特征,为了解决这个问题,提出LFA
Local Feature Aggregation

主要包括三部分
local spatial encoding (LocSE)
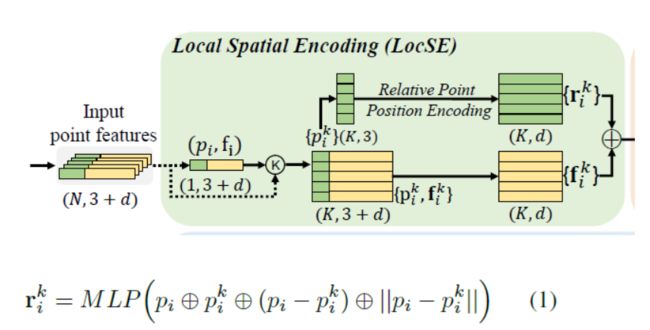
attentive pooling

Dilated Residual Block
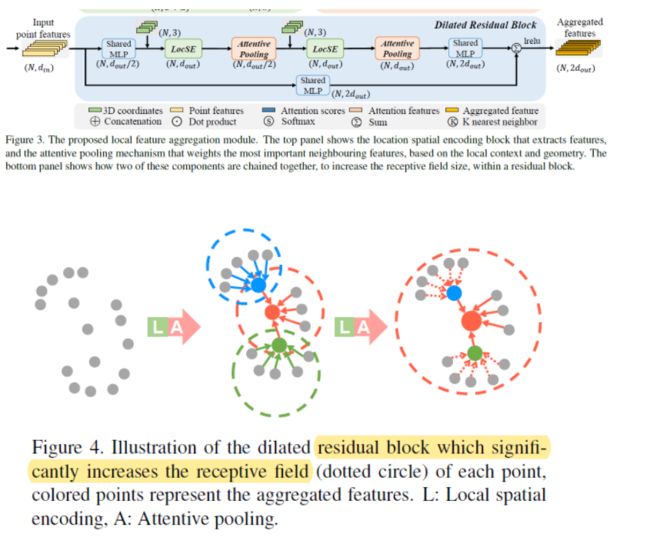
Implementation
堆叠多个LFA和random sampling模块;使用Adam优化器,学习率设置为0.01,每一个epoch减少5%;最近邻点数量K设置为16;为了并行训练,将点云采样到固定点数(10^5)对每一个点云作为其输入,整个过程不需要预处理/后处理等操作。
网络结构如下:

多说一点,根据这个图可以看到,个人感觉这个网络和PointNet2的结构非常相似,

PointNet2为了解决PointNet的缺失local feature的问题,提出了一个sampling,grouping的方法,通过对点云进行fps采样,在其邻域内对一个小的点集合进行PointNet特征提取,将采样点的邻域内的特征整合到采样点上。最后再通过skip link concatenation和插值方法(类似于cnn的1*1卷积)实现一个类似于上采样的操作;
在RandLA-net中,使用的是RS采样,然后对采样后的点的邻域点进行特征聚合,这是特征提取。特征提取完后,再进行特征反向传播来提高点的数量,并且通过share MLPs来降低特征的维度,最后再通过FC和Drop来获取每一个点的label
●Experiments
Efficiency of Random Sampling
Efficiency of RandLANet

得益于random sampling 和基于MLP的LFA策略,RandLA-net能实现185s-4071frames粗略计算=22FPS
Semantic Segmentation on Benchmarks
(1) Evaluation on Semantic3D

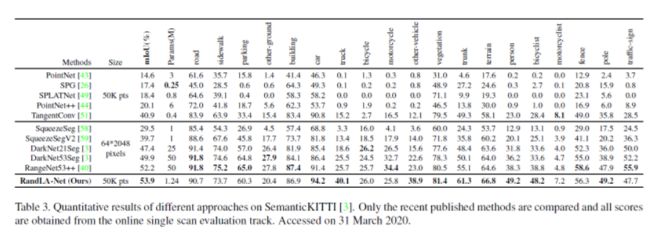
(2) Evaluation on SemanticKITTI.
(3) Evaluation on S3DIS.

相对于其他的方法(复杂且昂贵的采样,或分割点云为小的blocks),RandLA-net将整个房间作为输入并且能够直接(单阶段)高效推理每一个点的label。
●总结
对于大尺度的语义分割,提出了轻量级的的网络。采取了random sampling 而不是复杂的采样方案,并使用了一个LFA,local feature aggregation模块以从一个广阔的邻域中有效地保留有用的特征。我们的工作可以拓展到大尺度的实例分割以及实时动态点云处理
资源
三维点云论文及相关应用分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
3D目标检测:MV3D-Net
三维点云分割综述(上)
3D-MiniNet: 从点云中学习2D表示以实现快速有效的3D LIDAR语义分割(2020)
win下使用QT添加VTK插件实现点云可视化GUI
JSNet:3D点云的联合实例和语义分割
大场景三维点云的语义分割综述
PCL中outofcore模块---基于核外八叉树的大规模点云的显示
基于局部凹凸性进行目标分割
基于三维卷积神经网络的点云标记
点云的超体素(SuperVoxel)
基于超点图的大规模点云分割
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
【开源方案共享】ORB-SLAM3开源啦!
【论文速读】AVP-SLAM:自动泊车系统中的语义SLAM
【点云论文速读】StructSLAM:结构化线特征SLAM
SLAM和AR综述
常用的3D深度相机
AR设备单目视觉惯导SLAM算法综述与评价
SLAM综述(4)激光与视觉融合SLAM
Kimera实时重建的语义SLAM系统
SLAM综述(3)-视觉与惯导,视觉与深度学习SLAM
易扩展的SLAM框架-OpenVSLAM
高翔:非结构化道路激光SLAM中的挑战
SLAM综述之Lidar SLAM
基于鱼眼相机的SLAM方法介绍
往期线上分享录播汇总
第一期B站录播之三维模型检索技术
第二期B站录播之深度学习在3D场景中的应用
第三期B站录播之CMake进阶学习
第四期B站录播之点云物体及六自由度姿态估计
第五期B站录播之点云深度学习语义分割拓展
第六期B站录播之Pointnetlk解读
[线上分享录播]点云配准概述及其在激光SLAM中的应用
[线上分享录播]cloudcompare插件开发
[线上分享录播]基于点云数据的 Mesh重建与处理
[线上分享录播]机器人力反馈遥操作技术及机器人视觉分享
[线上分享录播]地面点云配准与机载点云航带平差
点云PCL更多活动请查看:点云PCL活动之应届生校招群
扫描下方微信视频号二维码可查看最新研究成果及相关开源方案的演示:

如果你对本文感兴趣,请点击“原文阅读”获取知识星球二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除

扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享及合作方式:群主微信“920177957”(需要按要求备注) 联系邮箱:[email protected],欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶
