目标检测的Tricks | 【Trick10】工具类文件调用(coco评价指标包、日志工具、Tensorboard工具...)
如有错误,恳请指出。
对于一些评价指标与常见的日志记录与输出,除了自己写或者是使用普通的python提供的工具包,比如说是logging等,其实还可以使用一些大佬写好的工具函数来调用,就拿我目前看过为数不多的项目代码,对于日志信息记录啥的,基本都会使用一个MetricLogger的工具类,还有记录数值的也有SmoothedValue这么一个工具类。对于目标检测中的验证,也有coco评价指标包来进行调用。
文章目录
- 1. coco评价指标包调用
- 2. 日志工具代码调用
- 3. Tensorboard工具调用
1. coco评价指标包调用
在训练完一个epoch数据之后,一般需要进行一个验证不过也可以全部训练完再进行验证。而在yolov3spp项目中,这里将预测结果送入官网写的计算coco评价指标包里,计算出coco评价指标:mAP@[IoU=0.50:0.95]、mAP@[IoU=0.50]、mAR@[IoU=0.50:0.95]等。而且这个工具包只需要在验证集进行调用即可,训练集训练与最后测试的过程是不需要用的。
对于这些工具类的文件代码,其实会掉包使用就好了。
调用流程如下:
# 遍历一遍验证集,将标签信息全部读取一遍,方便使用pycocotools来计算map,以下两条代码是等价的
# 根据val_dataset来获取img与target
# coco = get_coco_api_from_dataset(val_dataset)
coco = get_coco_api_from_dataset(data_loader.dataset)
coco_evaluator = CocoEvaluator(coco, iou_types) # iou_types: ['bbox']
...
# 获取后处理后的预测信息,此处的output包含对这张图像的:预测边界框信息、预测类别、预测置信度
# 一张图像对应了这张图像的一个信息字典(每个字典包含这三个信息)
res = {img_id: output for img_id, output in zip(img_index, outputs)}
coco_evaluator.update(res) # 对当前验证的batch进行更新保留
coco_evaluator.synchronize_between_processes()
coco_evaluator.accumulate()
coco_evaluator.summarize()
# 所需的评价指标:{list: 12}
result_info = coco_evaluator.coco_eval[iou_types[0]].stats.tolist()
对于这里的输出结果,result_info的内容,如下所示;
# COCO results:
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.597
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.816
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.658
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.221
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.467
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.688
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.477
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.684
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.698
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.352
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.587
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.769
如果对这些指标不认识的,可以查看我曾经写过的一篇博文:目标检测中的评估指标:PR曲线、AP、mAP,下面简要介绍:
# 这两行分别表示IoU取不同时候的mAP结果(分别阈值取0.5与0.75时的结果)
APIoU=.50% AP at IoU=.50 (PASCAL VOC metric) # 该指标就是pascol voc的评价指标
APIoU=.75% AP at IoU=.75 (strict metric)
# 表示当 IoU从0.5~0.95这段范围中,间隔为0.05,一共10个IoU值上mAP的均值,这个是coco数据集上最主要的评判指标
AP% AP at IoU=.50:.05:.95 (primary challenge metric) # 该指标是coco数据集的评价指标
所以在yolospp代码中,这里取第一,第二,第八行:
# 平均mAP指标:coco数据集上最主要的评判指标
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ]
# IoU取0.5时的mAP结果:pascol voc的评价指标
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ]
# 平均mAP指标:coco数据集上最主要的评判指标
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ]
如下所示:
# 遍历一遍验证集,将标签信息全部读取一遍,方便使用pycocotools来计算map
coco = get_coco_api_from_dataset(val_dataset)
# 每训练完一个epoch,都会进行验证一次,返回的结果就是输出的一些列coco的指标
result_info = train_util.evaluate(model, val_datasetloader, coco=coco, device=device)
# 获取验证结果
coco_mAP = result_info[0]
voc_mAP = result_info[1]
coco_mAR = result_info[8]
2. 日志工具代码调用
这里主要是介绍MetricLogger类的调用流程。
- 1)以验证过程为例,在evaluate函数使用如下:
# 构建MetricLogger类对象,选择用空格符来间隔信息,默认是\tab
metric_logger = utils.MetricLogger(delimiter=" ")
...
# 这里的img_index对于的是哪一张图像的索引
# iterable: data_loader 表示不断加载数据出来,一次取出一个batch_size的img
# 由于这里自定义了batch,设置了collate_fn函数,所以还会输出其他内容: targets, paths, shapes, img_index
# print_freq: 100 表示100轮打印一次参数
# header: 开头打印的内容,这里为"Test: "
for imgs, targets, paths, shapes, img_index in metric_logger.log_every(data_loader, 100, header):
...
metric_logger.update(model_time=model_time, evaluator_time=evaluator_time)
# 收集所有进程的统计信息
metric_logger.synchronize_between_processes()
print("Averaged stats:", metric_logger)
验证过程中打印的内容:
Test: [ 0/1456] eta: 0:06:45.600605 model_time: 0.1178 (0.1178) evaluator_time: 0.0083 (0.0083) time: 0.2786 data: 0.1483 max mem: 0
Test: [ 100/1456] eta: 0:02:30.134258 model_time: 0.1056 (0.1006) evaluator_time: 0.0055 (0.0071) time: 0.1101 data: 0.0001 max mem: 0
Test: [ 200/1456] eta: 0:02:48.761989 model_time: 0.3777 (0.1227) evaluator_time: 0.0065 (0.0069) time: 0.3621 data: 0.0001 max mem: 0
...
Test: Total time: 0:08:30 (0.3506 s / it)
Averaged stats: model_time: 0.1293 (0.3195) evaluator_time: 0.0044 (0.0064)
- 2)以训练过程为例,在train_one_epoch函数使用如下:
metric_logger = utils.MetricLogger(delimiter=" ")
metric_logger.add_meter('lr', utils.SmoothedValue(window_size=1, fmt='{value:.6f}'))
header = 'Epoch: [{}]'.format(epoch)
for i, (imgs, targets, paths, _, _) in enumerate(metric_logger.log_every(data_loader, print_freq, header)):
...
now_lr = optimizer.param_groups[0]["lr"]
metric_logger.update(loss=losses_reduced, **loss_dict_reduced)
metric_logger.update(lr=now_lr)
# 收集所有进程的统计信息
metric_logger.synchronize_between_processes()
print("lr and loss stats:", metric_logger)
训练过程中打印的内容:
Epoch: [0] [ 0/1430] eta: 0:25:21.825325 lr: 0.000001 loss: 19.4350 (19.4350) box_loss: 7.8804 (7.8804) obj_loss: 4.9758 (4.9758) class_loss: 6.5787 (6.5787) time: 1.0642 data: 0.2971 max mem: 0
Epoch: [0] [ 50/1430] eta: 0:12:22.615927 lr: 0.000051 loss: 14.0581 (18.1472) box_loss: 5.0861 (7.0637) obj_loss: 3.2172 (5.4319) class_loss: 5.7547 (5.6516) time: 0.5375 data: 0.0001 max mem: 0
Epoch: [0] [ 100/1430] eta: 0:11:26.523765 lr: 0.000101 loss: 11.8562 (16.4655) box_loss: 4.0006 (6.1806) obj_loss: 2.8863 (4.7584) class_loss: 4.9694 (5.5265) time: 0.5013 data: 0.0001 max mem: 0
...
Epoch: [0] Total time: 0:11:56 (0.5012 s / it)
lr and loss stats: lr: 0.001000 loss: 2.7556 (9.9921) box_loss: 0.7867 (4.2556) obj_loss: 1.0168 (2.7375) class_loss: 0.9520 (2.9990)
- 补充说明:
在MetricLogger类,如果有想要增加变量,并其的更新信息进行打印,其实只需要进行update即可,也就是调用函数metric_logger.update(lr=now_lr),这个函数会自动的将参数lr变成一个字典遍历,自动构建一个类来存储其不断更新的信息,部分代码见如下:
class MetricLogger(object):
def __init__(self, delimiter="\t"):
# 存储参数变量,且不断更新
self.meters = defaultdict(SmoothedValue)
self.delimiter = delimiter
# 自动保留字典遍历,记录其更新信息
def update(self, **kwargs):
for k, v in kwargs.items():
if isinstance(v, torch.Tensor):
v = v.item()
assert isinstance(v, (float, int))
self.meters[k].update(v)
# 之后是其他的定义,这里我就不贴上来了
...
# 打印本身返回的内容
def __str__(self):
loss_str = []
for name, meter in self.meters.items():
loss_str.append(
"{}: {}".format(name, str(meter))
)
return self.delimiter.join(loss_str)
class SmoothedValue(object):
"""Track a series of values and provide access to smoothed values over a
window or the global series average.
"""
def __init__(self, window_size=20, fmt=None):
if fmt is None:
fmt = "{value:.4f} ({global_avg:.4f})"
self.deque = deque(maxlen=window_size) # deque简单理解成加强版list
self.total = 0.0
self.count = 0
self.fmt = fmt
def update(self, value, n=1):
self.deque.append(value)
self.count += n
self.total += value * n
def synchronize_between_processes(self):
"""
Warning: does not synchronize the deque!
"""
if not is_dist_avail_and_initialized():
return
t = torch.tensor([self.count, self.total], dtype=torch.float64, device="cuda")
dist.barrier()
dist.all_reduce(t)
t = t.tolist()
self.count = int(t[0])
self.total = t[1]
@property
def median(self): # @property 是装饰器,这里可简单理解为增加median属性(只读)
d = torch.tensor(list(self.deque))
return d.median().item()
@property
def avg(self):
d = torch.tensor(list(self.deque), dtype=torch.float32)
return d.mean().item()
@property
def global_avg(self):
return self.total / self.count
@property
def max(self):
return max(self.deque)
@property
def value(self):
return self.deque[-1]
def __str__(self):
return self.fmt.format(
median=self.median,
avg=self.avg,
global_avg=self.global_avg,
max=self.max,
value=self.value)
- 总结:
在验证过程中,保留的变量是model_time, evaluator_time,所以会打印其更新信息;而在训练过程中,保留的变量是loss,box_loss,obj_loss,class_loss,lr,所以会打印其更新信息。而默认的输出信息有:eta,time,data与max mem。详情可以查看上述我贴上来的部分打印信息,对比就可以清楚了解。
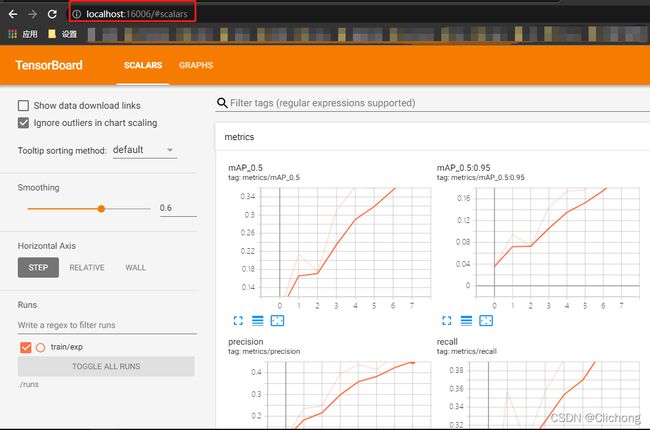
3. Tensorboard工具调用
tensorboard是一个可视化工具,可以在网页上动态的查看当前epoch所获得的各项参数。常见的还有另外的一个可视化工具:visdom,对于visdom的安装与简单使用可以查看我之前的博文:visdom安装与基本用法
这里以yolov3spp中的使用过程为例,来介绍tensorboard的使用,具体的使用方法这里就不再细述。在yolov3spp中训练过程的tensorboard使用流程如下所示:
from torch.utils.tensorboard import SummaryWriter
# 构建一个可视化类
tb_writer = SummaryWriter(comment=opt.name)
# 写入tensorboard,可通过网页打开查看相关信息
if tb_writer:
tags = ['train/giou_loss', 'train/obj_loss', 'train/cls_loss', 'train/loss', "learning_rate",
"mAP@[IoU=0.50:0.95]", "mAP@[IoU=0.5]", "mAR@[IoU=0.50:0.95]"]
# 这里的mloss包含了4个部分:边界框损失、置信度损失、分类损失、总损失
# mloss + [lr, coco_mAP, voc_mAP, coco_mAR] 就一共有八个指标,对应着八个标签tag
for x, tag in zip(mloss.tolist() + [lr, coco_mAP, voc_mAP, coco_mAR], tags):
# 以epoch为横坐标,x为竖坐标,tag为标题来进行更新
tb_writer.add_scalar(tag, x, epoch)
- 详细的参数定义如下:
def add_scalar(
self, tag, scalar_value, global_step=None, walltime=None, new_style=False
):
"""Add scalar data to summary.
Args:
tag (string): Data identifier
scalar_value (float or string/blobname): Value to save
global_step (int): Global step value to record
walltime (float): Optional override default walltime (time.time())
with seconds after epoch of event
new_style (boolean): Whether to use new style (tensor field) or old
style (simple_value field). New style could lead to faster data loading.
Examples::
from torch.utils.tensorboard import SummaryWriter
writer = SummaryWriter()
x = range(100)
for i in x:
writer.add_scalar('y=2x', i * 2, i)
writer.close()
Expected result:
.. image:: _static/img/tensorboard/add_scalar.png
:scale: 50 %
"""
torch._C._log_api_usage_once("tensorboard.logging.add_scalar")
if self._check_caffe2_blob(scalar_value):
from caffe2.python import workspace
scalar_value = workspace.FetchBlob(scalar_value)
summary = scalar(tag, scalar_value, new_style=new_style)
self._get_file_writer().add_summary(summary, global_step, walltime)
- 动态结果查看:
- 补充:
在yolov3spp项目中,除了通过MetricLogger的工具类来迭代加载想控制台输出信息,用tensorboard向网页输出信息(可以动态的显示整个训练的曲线过程,功能比较多),此外还会使用最普通的txt来存储相关的信息,这个就是最基本的操作了,和logging类似而已。
# 将coco的验证指标保存在一个txt文件当中
with open(results_file, "a") as f:
# 记录coco的12个指标加上训练总损失和lr
result_info = [str(round(i, 4)) for i in result_info + [mloss.tolist()[-1]]] + [str(round(lr, 6))]
txt = "epoch:{} {}".format(epoch, ' '.join(result_info))
f.write(txt + "\n")
- 总结:
这篇内容介绍了coco工具类的使用,以及两个日志记录的工具。这些代码是我从项目中截取而来,对于完整的项目流程可以查看我的其他博客,或者自行查看源码。