aloam 代码阅读与总结
文章目录
- Aloam
-
- Summary
-
- rosbag read_write
- scanRegistration
-
- laserCloudHandler
- laserOdometry
-
- TransformToStart
- LidarEdgeFactor
- LidarPlaneFactor
- laserMapping
-
- callback
- process
Aloam
-
A-LOAM是LOAM的高级实现,它使用 Eigen 和 Ceres Solver 来简化代码结构。 此代码由LOAM和LOAM_NOTEA修改而来。 这段代码简洁明了,没有复杂的数学推导和冗余操作。 对于 SLAM 初学者来说是一本很好的学习资料。 -
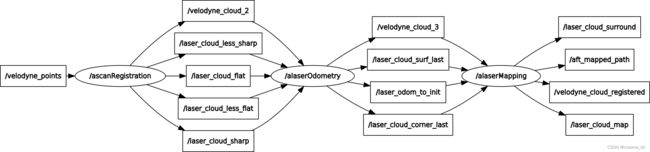
节点示意图:
-
KITTI Example
- 下载 KITTI Odometry dataset 数据集到 你数据集文件夹,设置
dataset_folder和sequence_number参数。 - 请注意,您还可以通过在
kitti_helper.launch中设置适当的参数来将 KITTI 数据集转换为包文件以便于使用。
- 下载 KITTI Odometry dataset 数据集到 你数据集文件夹,设置
Summary
优点:
- 代码确实简洁了不少,如果有loam基础在看这个,确实一目了然。
建议:
-
计算曲率时,每一线间的转变未考虑进去,不过不影响,因为提取特征时都跳过了每一线的起始多少个点
-
基于曲率大小筛选特征时,因为点云已经基于曲率排过序了
- 角点:if 判断曲率需大于0.1成立,否则直接break不好吗,一直遍历完不浪费时间
- 平面点:if 判断曲率需小于0.1成立,否则直接break不好吗,一直遍历完不浪费时间
-
找临近后确定 直线和平面时 感觉没lio-sam中精度高
-
ceres优化,来个手动求导不好吗
rosbag read_write
- 读写rosbag 用到 bag 类,具体使用见下例子:
// 定义读写对象,并申明
rosbag::Bag i_bag, o_bag;
i_bag.open(src_bag, rosbag::bagmode::Read);
o_bag.open(new_bag, rosbag::bagmode::Write);
// 定义一个数组
std::vector<std::string> topics;
topics.push_back(std::string(imu_topic));
topics.push_back(std::string(pcd_topic));
// 申明 rosbag::View对象
rosbag::View view(i_bag, rosbag::TopicQuery(topics));
///< 读取方法一:
for (auto m : view) { // 遍历view
sensor_msgs::Imu::ConstPtr imu = m.instantiate<sensor_msgs::Imu>();
if (imu == nullptr) { // 是否有imu
std::cerr << "imu null " << std::endl;
} else {
std::cout << "imu stamp:" << imu->header.stamp << std::endl;
o_bag.write(imu_topic, imu->header.stamp, imu);
}
sensor_msgs::PointCloud2::ConstPtr pcd =
m.instantiate<sensor_msgs::PointCloud2>();
if (pcd == nullptr) {
std::cerr << "pcd null " << std::endl;
} else {
std::cout << "pcd stamp:" << pcd->header.stamp << std::endl;
o_bag.write(pcd2_topic, pcd->header.stamp, pcd);
}
}
///< 读取方法二:
rosbag::View view(bag);
for (const rosbag::ConnectionInfo* c : view.getConnections()) {
const std::string& topic = c->topic;
if (topic_to_publisher.count(topic) == 0) {
ros::AdvertiseOptions options(c->topic, kQueueSize, c->md5sum,
c->datatype, c->msg_def);
topic_to_publisher[topic] = node_handle.advertise(options);
}
}
scanRegistration
主函数:
- Ros节点
- ros 节点初始化
scanRegistration - 读取参数:
scan_line、minimum_range
- ros 节点初始化
- 只支持 16,32,64 线的 velodyne,不对则 return
- 订阅话题:
/velodyne_pointslaserCloudHandler
- 发布话题:
sensor_msgs::PointCloud2>("/velodyne_cloud_2", 100);sensor_msgs::PointCloud2>("/laser_cloud_sharp", 100);sensor_msgs::PointCloud2>("/laser_cloud_less_sharp", 100);sensor_msgs::PointCloud2>("/laser_cloud_flat", 100);sensor_msgs::PointCloud2>("/laser_cloud_less_flat", 100);sensor_msgs::PointCloud2>("/laser_remove_points", 100);
- 基于参数 确定是否发布每条线 正常不执行
laserCloudHandler
- 上来一个系统初始化,就是单纯跳过多少帧
- 点云转 pcl格式,pcl::removeNaNFromPointCloud
- 移除最近点,removeClosedPointCloud
- 遍历每个点,求 点到 激光的距离,若距离小于阈值,则 continue
- 否则将点放入新一个容器中
- 起始角度计算:
- 开始角:startOri = -atan2(pointp[0].y,pointp[0].x)
- 结束角:endOri = -atan2(pointp[size-1].y,pointp[size-1].x)+2π
- 若 endOri-startOri > 3π endOri -= 2π
- 若 endOri-startOri < 3π endOri += 2π
- 计算 scanID + relTime
- scanID 哪一线,好计算
- relTime 与初始点的时间差 算与初始点的水平角*周期/总角度
- 计算每个点的曲率
- 跟 loam计算一样
- 每一线间的转变未考虑进去,不过不影响,因为提取特征时都跳过了每一线的起始多少个点
- 遍历 多线
N_SCANS,对于每一线,将点云均分成6份:- 计算每一份的起始下标: sp,ep
- 将每一份的点云按曲率从小到大排序
std::sort函数 - 找角点,反向遍历已排好序的点云
- 若曲率大于 0.1 且 周围点可以为特征点 时:
- 找曲率最大的2 点放入
cornerPointsSharp点云标记:2 - 找曲率 最大的20个放入
cornerPointsLessSharp点云标记:1 - 若该点标为特征点时, 周围的5个点不可以为特征点
- 找曲率最大的2 点放入
- 若曲率大于 0.1 且 周围点可以为特征点 时:
- 找平面点,正向遍历已排好序的点云
- 若曲率小于 0.1 且 周围点可以为特征点 时:
- 找曲率最大的4 点放入
surfPointsFlat点云标记:-1 - 若该点标为特征点时, 周围的5个点不可以为特征点
- 找曲率最大的4 点放入
- 若曲率小于 0.1 且 周围点可以为特征点 时:
- 若 标记为-1 则放入
surfPointsLessFlatScan
laserOdometry
主函数:
- Ros节点
- ros 节点初始化
laserOdometry - 读取参数:
mapping_skip_frame默认2
- ros 节点初始化
- 订阅话题:
/velodyne_cloud_2laserCloudFullResHandler- 这个点云就是去了最近点和 nan的
- 这个回调也比较简单,将 数据放入队列中
- 四种特征,角点,角点less,平面点,平面点less
- 这四个回调都比较简单,就把数据放入队列中而已
- 发布:
- 角点 和 平面点
velodyne_cloud_3laser_odom_to_initlaser_odom_path
- while 主线程,ros::spin0nce,100hz
- 上面5种数据都到 且 取第一个数据时间都一致时
- 当5种数据都到后,时间肯定一致,不一致ros报错
- 5种数据进行 pcl数据转换
- 若 systemInited== flase时:
- 直接赋值 systemInited=true
- 否则,优化两次,对于每一次都执行下列操作:
- 优化变量为 位姿 para_q,para_t,4+3个自由度
- 遍历角点特征:
- 将角点转换到里程计坐标系,TransformToStart
- 通过kdTree找到 直线
- 通过kdTree 找到上一帧中的最近角点下标
pointSearchInd - 该点下标 上下两range中最近的一个点作为 另一个点
- 两点构成一条直线
- 通过kdTree 找到上一帧中的最近角点下标
- 通过 LidarEdgeFactor 构造ceres直接约束
- 并添加残差
- 遍历平面特征:
- 将平面点转换到里程计坐标系,TransformToStart
- 通过kdTree找到 平面
- 通过kdTree 找到上一帧中的最近角点下标
pointSearchInd - 该点下标 上下两range中最近的一个点作为 另一个点
- 同一ring中 往前伸一个 平面特征作为 第三个点
- 通过kdTree 找到上一帧中的最近角点下标
- 通过 LidarPlaneFactor 构造ceres直接约束
- 并添加残差
- 构建求解器:迭代4次,QR分解,得到解
- 更新
q_w_curr和t_w_curr - 更新 上一帧 角点和平面点kdTree
- 上面5种数据都到 且 取第一个数据时间都一致时
TransformToStart
- 记录了上一次里程计坐标系的关系,直接按上次的关系进行转换
- 即认为 当前帧初值与上一帧初值一样,方便计算
LidarEdgeFactor
- 点到直线的距离,自动求导
LidarPlaneFactor
- 点到平安的距离,自动求导
laserMapping
主函数:
- ros节点初始化
- 定义节点
laserMapping - 读取参数:
mapping_line_resolution0.4mapping_plane_resolution0.8
- 定义节点
- 订阅话题:
/laser_cloud_corner_lastlaserCloudCornerLastHandler/laser_cloud_surf_lastlaserCloudSurfLastHandler/laser_odom_to_initlaserOdometryHandler/velodyne_cloud_3laserCloudFullResHandler
- 发布话题:
- 主线程 mapping_process process
callback
- 3个激光回调都将数据放入各自的队列中,有互斥锁
- 激光里程计回调除了将数据放入队列中后,还基于里程计漂移将数据从世界坐标系发出
process
while 1循环,2s执行一次
- 数据同步,并转换成pcl格式
- 若 3种点云数据 和 里程计数据都不为空时:
- 若某一种据比
cornerLastBuf.front()数据早时,则 pop
- 若某一种据比
- 取各个数据的第一个数据,应该 这四种数据的时间一致
- 同一节点发的,且四种数据的时间戳给的一样
- 将3种点云数据通过pcl 转换为各自对象,并从队列中 pop_front
- 若
cornerLastBuf非空时, pop其数据,保证实时性
- 若 3种点云数据 和 里程计数据都不为空时:
- 得到当前帧在世界坐标系的位姿 transformAssociateToMap()
- L W T = O W T ∗ L O T { _L^WT=_O^WT*_L^OT} LWT=OWT∗LOT
- 1、优化处理 找当前估计的lidar位姿属于哪个cube,I/J/K对应cube的索引
- cube中心位置索引,50m的分辨率,初始值 [10,10,5]
- 2、如果当前帧lidar位姿对应的cube在整个大cube边缘则将索引向中心方向挪动一个单位
- width 方向:centerCubeI 和 中心位置索引都相应改变
- centerCubeI 在 width 方向的小端 ,将帧cube指针向中心方向平移,即 i = i-1
- centerCubeI 在 width 方向的大端 ,将帧cube指针向中心方向平移,即 i = i+1
- height 方向:centerCubeJ 和 中心位置索引都相应改变
- centerCubeJ 在 height 方向的小端 ,将帧cube指针向中心方向平移,即 i = i-1
- centerCubeJ 在 height 方向的大端 ,将帧cube指针向中心方向平移,即 i = i+1
- depth 方向:centerCubeK 和 中心位置索引都相应改变
- centerCubeK 在 depth 方向的小端 ,将帧cube指针向中心方向平移,即 i = i-1
- centerCubeK 在 depth 方向的大端 ,将帧cube指针向中心方向平移,即 i = i+1
- width 方向:centerCubeI 和 中心位置索引都相应改变
- 3、取 centerCube周围的点云组成 局部地图
- 当前 centerCube 的 三个方向各扩展2个各自的 有效数组
- 将 centerCube周围有效数组的 角点、平面点地图集点云想加起来
- 4、当前帧 角点 和 平面点特征 进行降采样
- 5、得到当前帧与地图匹配的位姿
- 如果满足 角点地图个数大于10 且 平面点地图点个数大于50,才执行
- 将地图点云放入 kdtree中方便查找
- 迭代两次 求解:
- 遍历当前帧 角点特征,构建ceres误差模型
- 当前角点转到世界坐标系,并找5个最近点
- 若5个点都小于1m时
- 得到 5个点的协方差,并计算其特征值和特征向量
- 如果确实是线特征,构建线特征模型 (注意特征库按升序对特征值进行排序)
- 遍历当前帧 面点特征,构建ceres误差模型
- 转到世界坐标系,并找5个最近点
- 若5个点都小于1m时,构建5个点的方程: ax+by+c=1
- 若平面5个点到平面的距离都小于0.2m,证明平面成立,构建面特征模型
- 构建面特征模型
- 求解 得到 匹配结果
- 遍历当前帧 角点特征,构建ceres误差模型
- 6、优化完成后,更新数据
- 进行位姿更新
- 跟新当前帧中角点 在 cube,并加入地图
- 跟新当前帧中 平面点 在 cubeI,并放入地图
- 7、对地图进行体素滤波 降采样
- 8、发布相应的数据