RNN循环神经网络图解概念及从零开始实现
目录
RNN相关概念解析
图解RNN
衡量标准
梯度剪裁(常用于RNN)
RNNS的应用
循环神经网络从零开始实现
独热编码
初始化模型可学习的参数
初始化隐藏状态
定义循环神经网络模型(train 一个batch)
定义RNN类封装参数
预测字符并输出
梯度剪裁
定义训练模型(train 一个epoch)
RNN相关概念解析
图解RNN
RNN要做的就是把前一个时刻的信息传到下一个时刻 。
循环神经网络的输出取决于当前的输入和上一时刻的隐变量。隐变量中包含历史信息和Whh(如何转到下一时刻的输出)

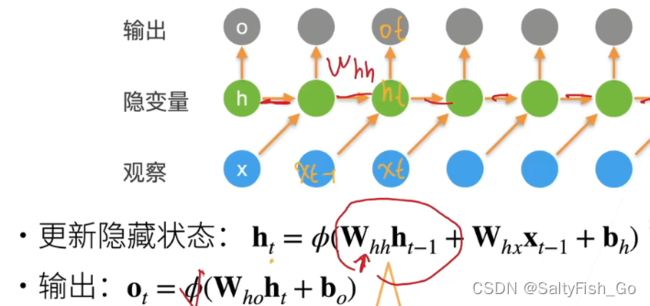
Whx是输入与隐藏层之间的权重,Whh包含着时序信息
语言模型就是一个分类模型,输出就是判断下一个词
衡量标准
衡量一个语言模型好坏的方式是平均交叉熵
困惑度(perplexity)就是对平均交叉熵作指数运算,如果值为1是最优,越大越差(不知道选哪个)

-
在最好的情况下,模型总是完美地估计标签词元的概率为1。 此时,模型的困惑度为1。
-
在最坏的情况下,模型总是预测标签词元的概率为0。 此时,困惑度是正无穷大。
梯度剪裁(常用于RNN)
如果梯度过大,导致产生的结果都是NAN;如果梯度过小,会导致更新不动
对于长度为T的序列,我们在迭代中计算这T个时间步上的梯度, 将会在反向传播过程中产生长度为O(T)的矩阵乘法链。 当TT较大时,它可能导致数值不稳定, 例如可能导致梯度爆炸或梯度消失。 因此,循环神经网络模型往往需要额外的方式来支持稳定训练。
目前流行的解决方法是:通过将梯度g投影回给定半径 (例如θ)的球来裁剪梯度g
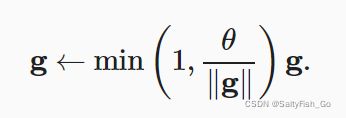
当g小于theta时,不会发生变化;如果g过大,会拉回至θ(可以设5和10)
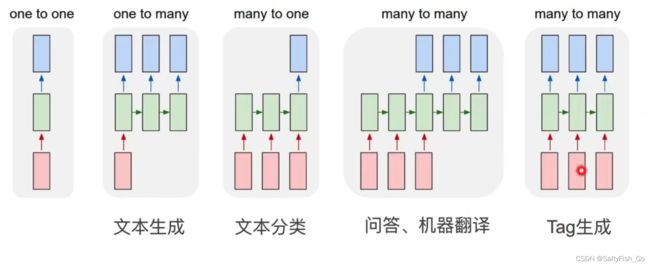
RNNS的应用
循环神经网络从零开始实现
独热编码
首先定义一个One-hot独热编码代码,方便后续使用
F.one_hot(torch.tensor([0, 2]), len(vocab))
tensor([[1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0],
[0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0]])
我们每次采样的小批量数据形状是二维张量: (批量大小,时间步数)。 one_hot函数将这样一个小批量数据转换成三维张量, 张量的最后一个维度等于词表大小(len(vocab))。 我们经常转换输入的维度,以便获得形状为 (时间步数,批量大小,词表大小)的输出。
X = torch.arange(10).reshape((2, 5))
F.one_hot(X.T, 28).shape转置是为了在连续的时间步上 迭代(虽然现在不太明白,但是感觉是为了方便训练,后面再理解一下)
如果第0维是批量大小,那么假如每次取一个样本 即(x1 x2 x3...)这样根据rnn计算规则,先算预测的x2 然后后才能算x3, 这样只能一个个算,不便于程序的并行执行。如果第0纬换成了时间序列,那么每拿一个出来,得到的就是(第一个x1 第二个x1...)这些是可以并行计算的,转置一下的好处就是把能够并行计算的东西 使得他们在空间存储上尽量相邻 提高计算效率。
torch.Size([5, 2, 28])
时间步数可以理解为一句话有几个词,批量大小就是句子数量,词表大小就是vocab
初始化模型可学习的参数
Num_hidden是个超参数;输入和输出来自相同的词表,所以输了都是vocab,本质上输出就是对结果做一个大小为vocab的分类。
def get_params(vocab_size, num_hiddens, device):
num_inputs = num_outputs = vocab_size
def normal(shape):
return torch.randn(size=shape, device=device) * 0.01
# 隐藏层参数
W_xh = normal((num_inputs, num_hiddens))
W_hh = normal((num_hiddens, num_hiddens))
#Whh上一个隐藏变量到下一个隐藏变量的矩阵
b_h = torch.zeros(num_hiddens, device=device)
# 输出层参数
W_hq = normal((num_hiddens, num_outputs))
b_q = torch.zeros(num_outputs, device=device)
# 附加梯度
params = [W_xh, W_hh, b_h, W_hq, b_q]
for param in params:
param.requires_grad_(True)
return params其中,RNN的独到之处是加了Whh来反应前后两者隐藏变量关系,包含了时序关系。
初始化隐藏状态
用这个函数再初始化时返回隐状态,返回的张量全部用0填充,并固定格式为(batch_size,num_hiddens)
def init_rnn_state(batch_size, num_hiddens, device):
return (torch.zeros((batch_size, num_hiddens), device=device), )定义循环神经网络模型(train 一个batch)
定义了如何在一个时间步内计算隐状态和输出
def rnn(inputs, state, params):
# inputs的形状:(时间步数量,批量大小,词表大小)
W_xh, W_hh, b_h, W_hq, b_q = params
H, = state
outputs = []
# X的形状:(批量大小,词表大小)
for X in inputs:
H = torch.tanh(torch.mm(X, W_xh) + torch.mm(H, W_hh) + b_h)
Y = torch.mm(H, W_hq) + b_q
outputs.append(Y)
return torch.cat(outputs, dim=0), (H,)RNN跟MLP的不同之处就在于黄色区域:
H = torch.tanh(torch.mm(X, W_xh) + torch.mm(H, W_hh) + b_h) 这一步骤增加了时序信息
计算当前时刻的隐藏状态,用tanh作为激活函数,torch.mm(H, W_hh)中的H是前一时刻的隐藏状态,即H, = state定义的。
代码理解:输出是隐藏状态H和权重矩阵Whq的相乘,和偏移b的相加得到。每一个Y都加入到outputs里,X是2*5*28,Y是10*28. 并把新的隐藏状态H输出,用作下一次的前一时刻隐藏状态。
定义RNN类封装参数
我们创建一个类来包装这些函数, 并存储从零开始实现的循环神经网络模型的参数。
class RNNModelScratch: #@save
"""从零开始实现的循环神经网络模型"""
def __init__(self, vocab_size, num_hiddens, device,
get_params, init_state, forward_fn):
self.vocab_size, self.num_hiddens = vocab_size, num_hiddens
self.params = get_params(vocab_size, num_hiddens, device)
self.init_state, self.forward_fn = init_state, forward_fn
def __call__(self, X, state):
X = F.one_hot(X.T, self.vocab_size).type(torch.float32)
return self.forward_fn(X, state, self.params)
#forward_fn就是刚刚的RNN模型定义
def begin_state(self, batch_size, device):
return self.init_state(batch_size, self.num_hiddens, device)让我们检查输出是否具有正确的形状。 例如,隐状态的维数是否保持不变
num_hiddens = 512
net = RNNModelScratch(len(vocab), num_hiddens, d2l.try_gpu(), get_params,
init_rnn_state, rnn)
state = net.begin_state(X.shape[0], d2l.try_gpu())
Y, new_state = net(X.to(d2l.try_gpu()), state)
Y.shape, len(new_state), new_state[0].shape(torch.Size([10, 28]), 1, torch.Size([2, 512]))
我们可以看到输出形状是(时间步数×批量大小,词表大小), 而隐状态形状保持不变,即(批量大小,隐藏单元数)。
预测字符并输出
在循环遍历prefix中的开始字符时, 我们不断地将隐状态传递到下一个时间步,但是不生成任何输出。 这被称为预热(warm-up)期, 因为在此期间模型会自我更新(例如,更新隐状态), 但不会进行预测。 预热期结束后,隐状态的值通常比刚开始的初始值更适合预测, 从而预测字符并输出它们。
def predict_ch8(prefix, num_preds, net, vocab, device): #@save
"""在prefix后面生成新字符"""
state = net.begin_state(batch_size=1, device=device)
outputs = [vocab[prefix[0]]]#输出的是分类的下标
get_input = lambda: torch.tensor([outputs[-1]], device=device).reshape((1, 1))
for y in prefix[1:]: # 预热期
_, state = net(get_input(), state)
outputs.append(vocab[y])
for _ in range(num_preds): # 预测num_preds步
y, state = net(get_input(), state)
outputs.append(int(y.argmax(dim=1).reshape(1)))#reshape成一个标量,放入outputs
return ''.join([vocab.idx_to_token[i] for i in outputs])没训练前:
predict_ch8('time traveller ', 10, net, vocab, d2l.try_gpu())'time traveller lfy lfy lf'
可以看出,没什么卵用
梯度剪裁
RNN在使用的时候要有一个梯度剪裁过程,防止梯度过大。在大的时候拉回至theta
def grad_clipping(net, theta): #@save
"""裁剪梯度"""
if isinstance(net, nn.Module):
params = [p for p in net.parameters() if p.requires_grad]
else:
params = net.params
norm = torch.sqrt(sum(torch.sum((p.grad ** 2)) for p in params))
if norm > theta:
for param in params:
param.grad[:] *= theta / norm定义训练模型(train 一个epoch)
在训练模型之前,让我们定义一个函数在一个迭代周期内训练模型。 它与我们之前训练的有三个不同点:
-
序列数据的不同采样方法(随机采样和顺序分区)将导致隐状态初始化的差异。
-
我们在更新模型参数之前裁剪梯度。 这样的操作的目的是:即使训练过程中某个点上发生了梯度爆炸,也能保证模型不会发散。
-
我们用困惑度来评价模型。 这样的度量确保了不同长度的序列具有可比性。
当使用顺序分区时, 我们只在每个迭代周期的开始位置初始化隐状态。 由于下一个小批量数据中的第ii个子序列样本 与当前第ii个子序列样本相邻, 因此当前小批量数据最后一个样本的隐状态, 将用于初始化下一个小批量数据第一个样本的隐状态。
#@save
def train_epoch_ch8(net, train_iter, loss, updater, device, use_random_iter):
"""训练网络一个迭代周期(定义见第8章)"""
state, timer = None, d2l.Timer()
metric = d2l.Accumulator(2) # 训练损失之和,词元数量
for X, Y in train_iter:
if state is None or use_random_iter:
# 在第一次迭代或使用随机抽样时初始化state
state = net.begin_state(batch_size=X.shape[0], device=device)
else:
if isinstance(net, nn.Module) and not isinstance(state, tuple):
# state对于nn.GRU是个张量
state.detach_()
else:
# state对于nn.LSTM或对于我们从零开始实现的模型是个张量
for s in state:
s.detach_()
y = Y.T.reshape(-1)
X, y = X.to(device), y.to(device)
y_hat, state = net(X, state)
l = loss(y_hat, y.long()).mean()
if isinstance(updater, torch.optim.Optimizer):
updater.zero_grad()
l.backward()
grad_clipping(net, 1)
updater.step()
else:
l.backward()
grad_clipping(net, 1)
# 因为已经调用了mean函数
updater(batch_size=1)
metric.add(l * y.numel(), y.numel())
return math.exp(metric[0] / metric[1]), metric[1] / timer.stop()
整个训练过程如下
#@save
def train_ch8(net, train_iter, vocab, lr, num_epochs, device,
use_random_iter=False):
"""训练模型(定义见第8章)"""
loss = nn.CrossEntropyLoss()
animator = d2l.Animator(xlabel='epoch', ylabel='perplexity',
legend=['train'], xlim=[10, num_epochs])
# 初始化
if isinstance(net, nn.Module):
updater = torch.optim.SGD(net.parameters(), lr)
else:
updater = lambda batch_size: d2l.sgd(net.params, lr, batch_size)
predict = lambda prefix: predict_ch8(prefix, 50, net, vocab, device)
# 训练和预测
for epoch in range(num_epochs):
ppl, speed = train_epoch_ch8(
net, train_iter, loss, updater, device, use_random_iter)
if (epoch + 1) % 10 == 0:
print(predict('time traveller'))
animator.add(epoch + 1, [ppl])
print(f'困惑度 {ppl:.1f}, {speed:.1f} 词元/秒 {str(device)}')
print(predict('time traveller'))
print(predict('traveller'))num_epochs, lr = 500, 1
train_ch8(net, train_iter, vocab, lr, num_epochs, d2l.try_gpu())困惑度 1.0, 67532.5 词元/秒 cuda:0 time traveller with a slight accession ofcheerfulness really thi travelleryou can show black is white by argument said filby