贝塞尔曲线原理--曲线生成--路径规划--matlab代码
贝塞尔曲线的原理:
从例子入手:
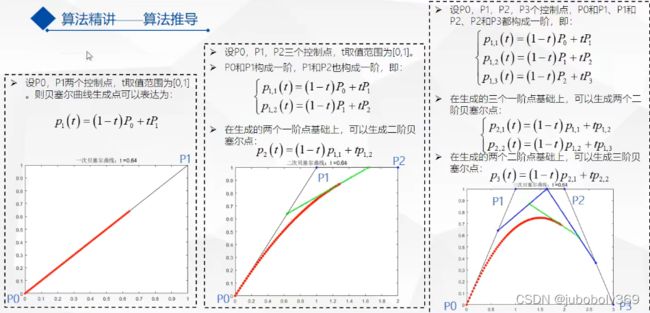
这里的 P0、P1、P2 分别称之为控制点,贝塞尔曲线的产生完全与这三个点位置相关。
这也就意味着,我们可以通过调节控制点的位置,进而调整整个曲线。
贝塞尔曲线是一个对强迫症极其友好的曲线,看这个动图就让人很舒适,而它的构造方法也一样让人很舒适。
最开始,对于绿色线段的两头 Q0 和 Q1,将其分别放在 P0 和 P1 的位置,此时让它们运动,要求:Q0 往 P1 方向,Q1 往 P2 方向,分别匀速运动,并且同时到达线段的另一头。
转化成数学公式,即为

在绿色线段上再取一个点 B ,如果 B 在绿色线段上的运动也满足上述的规律,那岂不是很爽!所以不妨再规定:

令上述等式等于 t,t 肯定是 [0,1] 的,其意义是点在它所处线段的位置。那么随着 t 的增大,Q0、Q1、B 的位置也就随之确定了!最终 B 的轨迹,便构成了贝塞尔曲线。
递归性质
仔细观察一下上述的构造过程,我们可以观察到:
首先,有三个控制点;
三个控制点形成两个线段,每个线段上有一个点在运动,于是得到两个点;
两个点形成一个线段,这个线段上有一个点在运动,于是得到一个点;
最后一个点的运动轨迹便构成了贝塞尔曲线!
我们发现,实际上是每轮都是 n 个点,形成 n-1 条线段,每个线段上有一个点在运动,那么就只关注这 n-1 个点,循环往复。最终只剩一个点时,它的轨迹便是结果。
那么,似乎最开始的控制点,也不一定是三个?如果是四个、五个,甚至更多呢?
四个点:
五个点:

如此一来,你会发现贝塞尔曲线内的递归结构。实际上,上述介绍的分别是三阶、四阶、五阶的贝塞尔曲线,贝塞尔曲线可以由阶数递归定义。
知识部分理解可以参考:怎么理解贝塞尔曲线? - 知乎 (zhihu.com)
或者:从零开始学图形学:10分钟看懂贝塞尔曲线 - 知乎 (zhihu.com)
下面用matlab代码展示贝塞尔曲线形成过程:
基本思路来自于:
代码:
%% 一、二、三阶贝塞尔曲线生成
%jubobolv
clc;
clear;
close all;
%% 一次贝塞尔曲线
P0=[0,0];
P1=[1,1];
P=[P0;P1];
figure(1);
plot(P(:,1),P(:,2),'k');
MakeGif('一次贝塞尔曲线.gif',1);
hold on
for t=0:0.01:1
P_t=(1-t) * P0 + t * P1;
scatter(P_t(1),P_t(2),200,'.r');
stringName = "一次贝塞尔曲线:t="+num2str(t);
title(stringName);
MakeGif('一次贝塞尔曲线.gif',t*100+1);
end
%% 二次贝塞尔曲线
P0=[0,0];
P1=[1,1];
P2=[2,1];
P=[P0;
P1;
P2];
figure(2);
plot(P(:,1),P(:,2),'k');
MakeGif('二次贝塞尔曲线.gif',1);
hold on
scatter(P(:,1),P(:,2),200,'.b');
for t=0:0.01:1
P_t_1=(1-t) * P0 + t * P1;
P_t_2=(1-t) * P1 + t * P2;
P_t_3=(1-t) * P_t_1 + t * P_t_2;
m1=scatter(P_t_1(1),P_t_1(2),300,'g');
m2=scatter(P_t_2(1),P_t_2(2),300,'g');
m3=plot([P_t_1(1),P_t_2(1)],[P_t_1(2),P_t_2(2)],'g','linewidth',2);
scatter(P_t_3(1),P_t_3(2),300,'.r');
stringName = "二次贝塞尔曲线:t="+num2str(t);
title(stringName);
MakeGif('二次贝塞尔曲线.gif',t*100+1);
delete(m1);
delete(m2);
delete(m3);
end
%% 三次贝塞尔曲线
P0=[0,0];
P1=[1,1];
P2=[2,1];
P3=[3,0];
P=[P0;
P1;
P2;
P3];
figure(3);
plot(P(:,1),P(:,2),'k');
MakeGif('三次贝塞尔曲线.gif',1);
hold on
scatter(P(:,1),P(:,2),200,'.b');
for t=0:0.01:1
P_t_1=(1-t) * P0 + t * P1;
P_t_2=(1-t) * P1 + t * P2;
P_t_3=(1-t) * P2 + t * P3;
P_t_4=(1-t) * P_t_1 + t * P_t_2;
P_t_5=(1-t) * P_t_2 + t * P_t_3;
P_t_6=(1-t) * P_t_4 + t * P_t_5;
m1=scatter(P_t_1(1),P_t_1(2),300,'g');
m2=scatter(P_t_2(1),P_t_2(2),300,'g');
m3=scatter(P_t_3(1),P_t_3(2),300,'g');
m4=scatter(P_t_4(1),P_t_4(2),300,'m');
m5=scatter(P_t_5(1),P_t_5(2),300,'m');
m6=plot([P_t_1(1),P_t_2(1),P_t_3(1)],[P_t_1(2),P_t_2(2),P_t_3(2)],'g','linewidth',2);
m7=plot([P_t_4(1),P_t_5(1)],[P_t_4(2),P_t_5(2)],'m','linewidth',2);
scatter(P_t_6(1),P_t_6(2),300,'.r');
stringName = "三次贝塞尔曲线:t="+num2str(t);
title(stringName);
MakeGif('三次贝塞尔曲线.gif',t*100+1);
delete(m1);
delete(m2);
delete(m3);
delete(m4);
delete(m5);
delete(m6);
delete(m7);
end
其中调用的生成GIF图的函数MakeGif.m如下:
function [outputArg1,outputArg2] = MakeGif(name,t)
%该函数用于生成动态GIF图
% 参数1:图像名称 参数2:步长(或时间)
drawnow
F=getframe(gcf);
I=frame2im(F);
[I,map]=rgb2ind(I,256);
if t == 1
imwrite(I,map,name,'gif', 'Loopcount',inf,'DelayTime',0.2);
else
imwrite(I,map,name,'gif','WriteMode','append','DelayTime',0.2);
end
end
效果图如下:
将贝塞尔曲线用于无人车路径规划的障碍物避障
可以尽量使规划路径满足车辆转弯曲率。代码如下:
%% 贝塞尔路径规划
%jubobolv
clc;
clear;
close all;
%% 基本信息 路宽 路长
road_width=3.6;
road_length=40;
%起点 障碍物点 目标点
P0=[2 2];
Pob=[10 2.2;
18 5.4;
30 4;];
Pg=[39 5.5];
P=[P0;Pob;Pg];
i=1
%% 贝塞尔曲线计算 基本思路Pt=(1-t)*P1+t*P2
for t=0:0.01:1
% 一次贝塞尔曲线
p_t_1=(1-t)*P(1,:)+t*P(2,:);
p_t_2=(1-t)*P(2,:)+t*P(3,:);
p_t_3=(1-t)*P(3,:)+t*P(4,:);
p_t_4=(1-t)*P(4,:)+t*P(5,:);
% 二次贝塞尔曲线
pp_t_1=(1-t)*p_t_1+t*p_t_2;
pp_t_2=(1-t)*p_t_2+t*p_t_3;
pp_t_3=(1-t)*p_t_3+t*p_t_4;
% 三次贝塞尔曲线
ppp_t_1=(1-t)*pp_t_1+t*pp_t_2;
ppp_t_2=(1-t)*pp_t_2+t*pp_t_3;
% 四次贝塞尔曲线
pppp_t(i,:)=(1-t)*ppp_t_1+t*ppp_t_2;
i=i+1;
end
%% 作图
figure
% 道路背景填充
fill([0 road_length road_length 0],[0 0 2*road_width 2*road_width],[0.5,0.5,0.5]);
hold on
%车道中间线(两车道中间)
plot([0 road_length],[road_width road_width],'--w','linewidth',2);
%起点
plot(P0(:,1),P0(:,2),'*b');
%障碍物点
plot(Pob(:,1),Pob(:,2),'ob');
%目标点
plot(Pg(:,1),Pg(:,2),'pm');
%绘制贝塞尔规划的路径点
plot(pppp_t(:,1),pppp_t(:,2),'.r');
axis equal
set(gca,'XLim',[0 road_length])
set(gca,'YLim',[0 2*road_width])效果图如下:
