无人驾驶全局路径规划之A星算法
根据查阅网上关于A星算法的原理,结合自己的理解,使用MATLAB实现A星算法生成路径。原理部分我不再赘述,网上介绍的文章还是很多的。
下面主要展示自己编的A星算法,有疑问欢迎交流。
注:我这里虽然用了栅格地图,但生成新节点时,是按“上下左右”四个方向按一定生长步长生成新节点,这和常见的按栅格生成新栅格的方法有些不同,请注意区分。
clear;
close all;
%注意障碍物的权值按行列生成,而路径曲线是以左下角为原点生成,注意两者的区别
load parkingLotCostVal.mat % costVal
%生成带权值的网格地图
costmap = vehicleCostmap(costVal,'CellSize',1);%每个网格边长1米
%设置障碍物的膨胀范围
ccConfig =inflationCollisionChecker('CenterPlacements',[0.2 0.5 0.8],'InflationRadius',0);
costmap.CollisionChecker = ccConfig;
%画出整个地图
plot(costmap);hold on;
set(gca,"XTick",0:1:150);
set(gca,"YTick",0:1:100);
grid on;%hold on;
legend("off");
%检测有障碍物的区域
occMat = checkOccupied(costmap);
x_start=[6,10];%起点坐标
goal=[90,43];%终点坐标
r=1;%生成步长
likai_length=0.01;%两点距离小于0.01,则认为两点为同一点
goal_radius=1;%搜索停止阈值
%画出起点
plot(x_start(1),x_start(2),'k>','MarkerFaceColor','g','MarkerSize',9);hold on;
%画出终点
plot(goal(1),goal(2),'ko','MarkerFaceColor','r','MarkerSize',9);hold on;
%创建各个中间量记录表
closed=[];%记录探索过的点
closed_parent_index=[];%记录探索过的点的父节点在cLosed表中的位置
open=[];%记录即将探索的点
open_parent_index=[];%记录即将探索的点的父节点在cLosed表中的位置
F_value=[];%记录F值
open_G_value=[];%记录open表中每个点的G值
%初始化各个表
closed=[closed;x_start];
closed_parent_index=[closed_parent_index;1];
closed_G_value=0;
flag=1;%终止循环的标志
search_p=x_start;%起始点为第一个探索点
while flag
%自定义函数around_points生成search_p周围4个方向的点
all_p=around_points_4([search_p,r]);
for i=1:size(all_p,1)%对每个点进行判断
tem1=all_p(i,:);
rule0=(tem1(1)>=0)&&(tem1(1)<=150)&&(tem1(2)>=0)&&(tem1(2)<=100);%判断有无超出地图边界
if rule0
tem2=tem1-closed;
rule2=sum(sqrt(tem2(:,1).^2+tem2(:,2).^2)>likai_length)==size(closed,1);%生成的点是否在closed列表中
if isempty(open)
rule3=true;%open表空,表明正在探索起始点,则新生成的点肯定不在open表中
else
tem3=tem1-open;
%生成的点是否在open列表中
rule3=sum(sqrt(tem3(:,1).^2+tem3(:,2).^2)>likai_length)==size(open,1);
end
%判断生成节点与父节点连线是否在障碍物上
cha=cha_points_4(search_p,i,r);
RULE1_TEM=[];
for t=1:size(cha,2)
tem6=cha(:,t);
rule1_tem=occMat(101-(fix(tem6(2))+1),(fix(tem6(1))+1))==false;%生成的点是否在障碍物上
RULE1_TEM=[RULE1_TEM;rule1_tem];
end
rule1=sum(RULE1_TEM)==t;
if rule1 && rule2 && rule3 %三个条件都满足才能将该点放入open表中
%画出探索点与生成点的连线
plot([search_p(1),tem1(1)],[search_p(2),tem1(2)],'b-');hold on;
plot(tem1(1),tem1(2),'b.','MarkerSize',6);hold on;
open=[open;tem1];%将该点加入到open表中
open_parent_index=[open_parent_index;size(closed,1)];%更新open_parent_index
open_G_value=[open_G_value;1+closed_G_value(end)];%更新open_parent_indexopen_G_value
G_value=open_G_value(end);%G值
H_value=abs(tem1(1)-goal(1))+abs(tem1(2)-goal(2));%H值,使用曼哈顿距离
F_value_tem=G_value+H_value;%F值
F_value=[F_value;F_value_tem];
end
end
end
[F_value,I] = sort(F_value);%F值排序
open=open(I,:);%open表排序
open_parent_index=open_parent_index(I);%open_parent_index排序
search_p=open(1,:);%更新下一个探索点,并从open表中删掉该点
closed=[closed;search_p];%更新closed
closed_parent_index=[closed_parent_index;open_parent_index(1)];%更新closed_parent_index
closed_G_value=[closed_G_value;open_G_value(1)];%closed_G_value
open(1,:)=[];
F_value(1,:)=[];
open_parent_index(1,:)=[];
%判断是否到达终点
tem4=goal-closed;
find_goal=sum(sqrt(tem4(:,1).^2+tem4(:,2).^2)<=goal_radius)>0;
if (find_goal)
flag=0;
end
end
%画出找到的路径
tem1=length(closed_parent_index);%从终点所在的行开始搜索
zuiyou_lujing=[goal(1),goal(2)];%首先将终点加入进去
while tem1>1 %如果没有到起点的行号(也就是第一行),则一直找下去
zuiyou_lujing=[zuiyou_lujing;closed(tem1,:)];
tem1=closed_parent_index(tem1);%使用当前行的closed_parent_index更新tem1
end
zuiyou_lujing=[zuiyou_lujing;x_start];%将起点加入进去
%画出所生成的路径
plot(zuiyou_lujing(:,1),zuiyou_lujing(:,2),'-r',"LineWidth",2);
%使用直线平滑对生成的路径进行平滑
s_index=1;
i=2;
while i<=size(zuiyou_lujing,1)
cha_p=s_cha(zuiyou_lujing(s_index,:),zuiyou_lujing(i,:));
TEM7=[];
for t=1:size(cha_p,2)
tem6=cha_p(:,t);
tem7=occMat(101-(fix(tem6(2))+1),(fix(tem6(1))+1))==false;%生成的点是否在障碍物上
TEM7=[TEM7;tem7];
end
if sum(TEM7)==t
i=i+1;
else
tem8=zuiyou_lujing(i-1,:);
tem9=zuiyou_lujing(s_index,:);
plot([tem9(1),tem8(1)],[tem9(2),tem8(2)],'g-',"LineWidth",2);hold on;
s_index=i-1;
end
end
tem9=zuiyou_lujing(s_index,:);
tem8=zuiyou_lujing(end,:);
plot([tem9(1),tem8(1)],[tem9(2),tem8(2)],'g-',"LineWidth",2);
hold off;
其中使用到的自定义函数如下,
function y=around_points_4(x)
r=x(3);
y(1,:)=[x(1)-r,x(2)];
y(2,:)=[x(1),x(2)+r];
y(3,:)=[x(1)+r,x(2)];
y(4,:)=[x(1),x(2)-r];
end
function y=cha_points_4(x,i,r)
xx=x(1);
yy=x(2);
switch i
case 1
a=linspace(xx,(xx-r),100);
b=ones(1,100)*yy;
case 2
a=ones(1,100)*xx;
b=linspace(yy,(yy+r),100);
case 3
a=linspace(xx,(xx+r),100);
b=ones(1,100)*yy;
case 4
a=ones(1,100)*xx;
b=linspace(yy,(yy-r),100);
end
y=[a;b];
end
function out=s_cha(p1,p2)
x1=p1(1);
y1=p1(2);
x2=p2(1);
y2=p2(2);
if x1==x2
a=ones(1,100)*x1;
b=linspace(y1,y2,100);
else
k=(y2-y1)/(x2-x1);
angle=atan(k);
L=sqrt((x2-x1)^2+(y2-y1)^2);
Lslice=linspace(0,L,100);
a=(double((x2-x1)>0)*2-1)*Lslice*abs(cos(angle))+x1;
b=(double((y2-y1)>0)*2-1)*Lslice*abs(sin(angle))+y1;
end
out=[a;b];
end
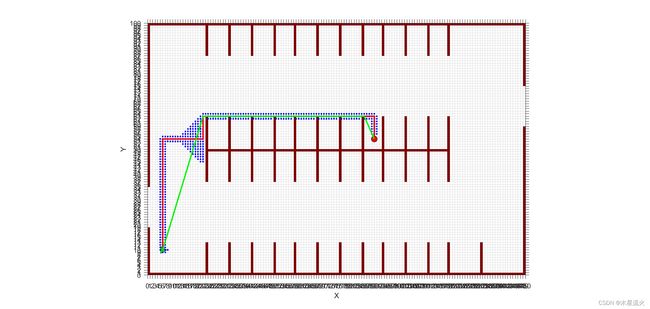
当目标点坐标为goal=[90,43]时,输出结果如下(其中红线为生成的路径,绿线为直线平滑后的路径),
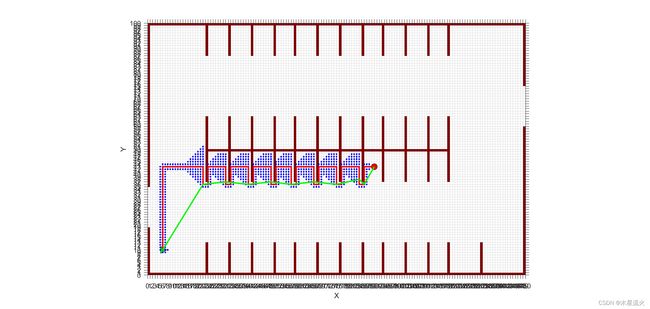
当目标点坐标为goal=[90,54]时,输出结果如下,