感知机对偶算法
知识源于——《统计学习方法(第二版)》李航
感知机(perception)一种二分类的线性分类模型。输入为实例的特征向量,输出为实例的类别(二分类类别为-1,+1二值)。
用算法2.2(感知机学习算法的对偶形式)代码实现例2.2:
一,实验目的
用算法2.2(感知机学习算法的对偶形式)完成例2.2:
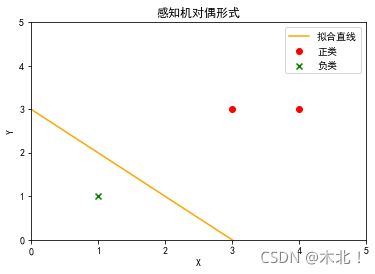
正样本点是x1=(3,3)T, x2=(4,3)T,负样本点x3=(1,1)T,用感知机学习对偶形式求感知机模型。
二,实验内容
1.根据拉格朗日对偶性,可将原始算法的极小极大问题转化为对偶算法的极大极小问题。感知机模型:f(x)= sign(w*x+b),即

2.最后参考P44算法2.2,实现P45例题,绘制出分类图像。
三,实验步骤与方法
算法过程为:
输入:线性可分的数据集T={x1,y1,x2,y2,…(xn,yn)},其中xi∈Rn,yi∈{-1,+1},i=1,2,…N;学习率η(0<η≤1)
输出:α,β;感知机模型 ,其中α={α1,α2,…,αn}T
- 首先取α1,α2,α3为0,取b=0,学习率为1
- 计算Gram矩阵
![G=[x_{i}*y_{i}]_{N*N}](http://img.e-com-net.com/image/info8/e11047af5d514a23ba74aa0c792c5adb.gif)
- 判断误分类条件
 ,为误分类
,为误分类 - 若误分类,更新参数αi,b
- 重复第三四步,直到无误分类点,停止迭代,
- 取得感知机模型的分离超平面,求出感知机模型。
四,代码实现
# -*- coding: utf-8 -*-
"""
Created on Wed Sep 29 01:38:37 2021
@author: lx
"""
import numpy as np
import matplotlib.pyplot as plt
def Gram(x_list):
''' 计算Gram矩阵 '''
G = [[0 for j in range(len(x_list))] for i in range(len(x_list))]
for i in range(len(x_list)):
for j in range(i, len(x_list)):
G[i][j] = x_list[i][0]*x_list[j][0] + x_list[i][1]*x_list[j][1]
G[j][i] = G[i][j]
return G
def Perceptron_Study_antithesis(x_list, y_list):
alpha = np.zeros(len(y_list))
b = 0
rate = 1 # 学习率
item = 0 # 迭代次数
G = Gram(x_list) # 计算Gram矩阵
while True:
flag = 0
for i in range(len(y_list)):
temp = 0
for j in range(len(y_list)):
temp += alpha[j]*y_list[j]*G[j][i]
if y_list[i]*(temp + b) > 0:
flag += 1
continue
else:
item += 1
alpha[i] += rate
b += y_list[i]*rate
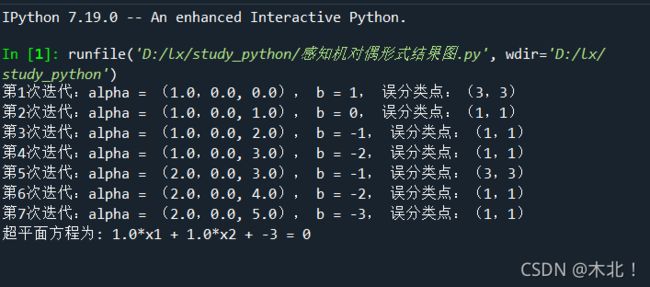
print('第{}次迭代:alpha = ({},{}, {}), b = {}, 误分类点:({},{})'.format(item, alpha[0], alpha[1], alpha[2], b, x_list[i][0], x_list[i][1]))
break
if flag == len(y_list): # 全部分对,不再调整方程
w = [0, 0]
for i in range(len(y_list)):
w[0] += alpha[i]*y_list[i]*x_list[i][0]
w[1] += alpha[i]*y_list[i]*x_list[i][1]
print('超平面方程为: {}*x1 + {}*x2 + {} = 0'.format(w[0], w[1], b))
plt.rcParams['font.sans-serif']=['SimHei']
plt.rcParams['axes.unicode_minus'] = False
plt.xlabel('X')
plt.ylabel('Y')
plt.xlim(xmax=5,xmin=0)
plt.ylim(ymax=5,ymin=0)
x1=np.array([3,4])
y1=np.array([3,3])
x3 = np.array([1])
y3 = np.array([1])
plt.scatter(x1, y1, marker = 'o', alpha=1,color="red", label='正类')
plt.scatter(x3, y3, marker = 'x', alpha=1,color="green", label='负类')
x2 = np.arange(0,5,0.1)
y2 = -((w[0])*x2 +b)/(w[1]+0.000001)
plt.plot(x2,y2,label="拟合直线",c='orange')
plt.legend()
plt.title('感知机对偶形式')#图的标题
plt.show()
break
if __name__ == '__main__':
x_list = [(3,3), (4,3), (1,1)]
y_list = [1, 1, -1]
Perceptron_Study_antithesis(x_list, y_list)
五,实验结果
欢迎大佬指点交流。感谢浏览。学习的文章:
- 感知机理论知识(知识点相同,但用c写的代码):感知机的原始形式和对偶形式在解决问题的计算上是一致的,但是他们的思想不同,原始形式的基本思想是对于误分类点,调整w和b,使分类超平面向该误分类点的一侧移动,以减少该误分类点与超平面的距离,直到超平面越过该误分类点使其被正确分类为止。 而对偶形式的基本思想是将w和b表示成x和y的线性组合形式,从而求出w和b。
《李航:统计学习方法》笔记之感知机_龙在天涯-CSDN博客 - 感知机python代码实现《李航统计学习方法》第二章:感知机学习算法 - 算法代码_potato_cyy的博客-CSDN博客
- 另一种实现感知机思路统计学习方法第2章 感知机 Python实现_sinat_41758351的博客-CSDN博客