- ROS 避障技术介绍
Xian-HHappy
机器人-Robotros避障
ROS避障技术介绍一、ROS避障系统概述ROS(机器人操作系统)作为移动机器人开发的主流框架,其避障技术依托模块化设计,通过传感器数据融合、环境建模与运动规划实现动态障碍物规避。在物流机器人、服务机器人、自动驾驶等场景中,ROS避障系统需满足实时性、安全性与灵活性要求,核心流程包括环境感知-障碍建模-路径规划-运动控制四个环节。二、避障核心组件与原理1.传感器层:环境信息获取激光雷达(如Velod
- AI人工智能领域知识图谱在深度学习中的应用拓展
AI人工智能领域知识图谱在深度学习中的应用拓展关键词:知识图谱、深度学习、神经网络、图嵌入、知识表示学习、推理机制、应用场景摘要:本文深入探讨了知识图谱与深度学习的融合应用,系统性地分析了知识图谱在深度学习中的关键技术路径和应用场景。文章首先介绍了知识图谱的基本概念和表示方法,然后详细阐述了知识图谱与深度学习结合的多种技术路线,包括图神经网络、知识嵌入和推理机制等。接着通过具体案例展示了知识图谱增
- 基于django+Spark+大数据+爬虫技术的国漫推荐与可视化平台设计和实现(源码+论文+部署讲解等)
阿勇学长
大数据项目实战案例Java精品毕业设计实例Python数据可视化项目案例大数据djangospark国漫推荐与可视化平台毕业设计Java
博主介绍:✌全网粉丝50W+,csdn特邀作者、博客专家、CSDN新星计划导师、Java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和学生毕业项目实战,高校老师/讲师/同行前辈交流✌技术范围:SpringBoot、Vue、SSM、HLMT、Jsp、PHP、Nodejs、Python、爬虫、数据可视化、小程序、安卓app、大数据、物联网、机器学习等
- 文本生成新纪元:解锁大模型的企业级应用密码
数字化浪潮席卷各行业的当下,文本生成技术正经历着翻天覆地的变革,这场变革的幕后功臣正是大模型。今天,咱们就来深入探讨大模型在文本生成领域的奥秘,看看它如何赋能企业,又该怎样规避风险,实现价值最大化。技术跃迁:从笨拙规则到智能生成回首往昔,文本生成依靠规则模板与关键字替换,虽能实现基础自动化,却如机械舞者,动作生硬、缺乏灵动。业务稍有变动,规则需全面重构,耗时费力。随着N-gram等统计机器学习方法
- 【零基础学AI】 第10讲:线性回归
1989
0基础学AI人工智能线性回归算法python回归numpy开源
本节课你将学到理解线性回归的原理和应用场景掌握最小二乘法的基本思想使用Python构建房价预测模型学会评估回归模型的性能指标开始之前环境要求Python3.8+JupyterNotebook或任何PythonIDE需要安装的包pipinstallscikit-learnpandasmatplotlibseabornnumpy前置知识第9讲:机器学习概述基本的Python和数据处理能力核心概念什么是
- 【零基础学AI】第9讲:机器学习概述
1989
0基础学AI人工智能机器学习pythonnumpydevops开源
本节课你将学到理解什么是机器学习,以及它与传统编程的区别掌握监督学习、无监督学习的基本概念使用scikit-learn完成你的第一个机器学习项目构建一个完整的iris花朵分类器开始之前环境要求Python3.8+JupyterNotebook或任何PythonIDE需要安装的包pipinstallscikit-learnpandasmatplotlibseaborn前置知识基本的Python语法(
- NLP随机插入
Humbunklung
机器学习自然语言处理人工智能pythonnlp
文章目录随机插入示例Python代码示例随机插入随机插入是一种文本数据增强方法,其核心思想是在原句中随机选择若干位置,插入与上下文相关的词语,从而生成新的训练样本。这种方法能够增加句子的多样性,提高模型对不同词序和表达方式的鲁棒性。示例原句:机器学习可以提升数据分析的效率。随机插入后(插入“显著”):机器学习可以显著提升数据分析的效率。Python代码示例下面是一个简单的随机插入实现,假设我们有一
- 使用SQL-Ollama与自然语言交互SQL数据库的指南
antja_
数据库sql
#使用SQL-Ollama与自然语言交互SQL数据库的指南##技术背景介绍随着人工智能技术的发展,能够使用自然语言与SQL数据库交互的需求越来越大。这种技术可以帮助用户轻松访问和操作数据库,而无需深刻理解SQL语法。SQL-Ollama是一个专门设计的模板,利用Zephyr-7b模型,通过Ollama在本地运行推理,使这一过程变得简单而高效。##核心原理解析SQL-Ollama通过将自然语言转换为
- 【TVM 教程】PAPI 入门
ApacheTVM是一个深度的深度学习编译框架,适用于CPU、GPU和各种机器学习加速芯片。更多TVM中文文档可访问→https://tvm.hyper.ai/性能应用程序编程接口(PerformanceApplicationProgrammingInterface,简称PAPI)是一个可在各种平台上提供性能计数器的库。在指定的运行期间,性能计数器提供处理器行为的准确底层信息,包含简单的指标,如总
- 文心大模型4.5及X1重磅上线,真实测评
2025年3月16日,人工智能领域迎来一场重要盛事——百度文心大模型4.5如期正式发布。与此同时,百度还惊喜推出了另一款全新模型——文心大模型X1。目前,文心大模型4.5和X1已在文心一言官网(https://yiyan.baidu.com/)正式上线,并免费向用户开放。其中,文心大模型4.5面向企业用户和开发者,用户可以通过登录百度智能云千帆大模型平台,轻松调用文心大模型4.5的API接口,快速
- 机器学习在智能供应链中的应用:需求预测与库存优化
Blossom.118
机器学习与人工智能机器学习人工智能机器人深度学习python神经网络sklearn
在当今全球化的商业环境中,供应链管理的效率和灵活性对于企业的竞争力至关重要。智能供应链通过整合先进的信息技术,如物联网(IoT)、大数据和机器学习,能够实现从原材料采购到产品交付的全流程优化。机器学习技术在智能供应链中的应用尤为突出,尤其是在需求预测和库存优化方面。本文将探讨机器学习在智能供应链中的应用,并分析其带来的机遇和挑战。一、智能供应链中的需求预测准确的需求预测是供应链管理的核心。需求预测
- 面向隐私保护的机器学习:联邦学习技术解析与应用
Blossom.118
机器学习与人工智能机器学习人工智能深度学习tensorflowpython神经网络cnn
在当今数字化时代,数据隐私和安全问题日益受到关注。随着《数据安全法》《个人信息保护法》等法律法规的实施,企业和机构在数据处理和分析过程中面临着越来越严格的合规要求。然而,机器学习模型的训练和优化往往需要大量的数据支持,这就产生了一个矛盾:如何在保护数据隐私的前提下,充分利用数据的价值进行机器学习模型的训练和优化?联邦学习(FederatedLearning)作为一种新兴的隐私保护技术,为解决这一问
- 人工智能-基础篇-10-什么是卷积神经网络CNN(网格状数据处理:输入层,卷积层,激活函数,池化层,全连接层,输出层等)
weisian151
人工智能人工智能cnn神经网络
卷积神经网络(ConvolutionalNeuralNetwork,CNN)是一种专为处理网格状数据(如图像、视频、音频)设计的深度学习模型。它通过模拟生物视觉机制,从原始数据中自动提取多层次的特征,最终实现高效的分类、检测或生成任务。1、核心概念与原理1、生物视觉启发局部感受野:模仿人类视觉皮层神经元仅响应局部区域刺激的特性,每个神经元关注输入数据的局部区域(如图像的一小块区域)。权值共享:同一
- python系列教程246——多态
人工智能AI技术
python系列教程python开发语言
朋友们,如需转载请标明出处:https://blog.csdn.net/jiangjunshow声明:在人工智能技术教学期间,不少学生向我提一些python相关的问题,所以为了让同学们掌握更多扩展知识更好地理解AI技术,我让助理负责分享这套python系列教程,希望能帮到大家!由于这套python教程不是由我所写(有时候有空也会参与编写),所以不如我的人工智能教程风趣幽默,学起来比较枯燥;但它的知
- Python 解析 AI 在能源管理与智能电网中的应用
头发在线失联
python人工智能开发语言
```htmlPython解析AI在能源管理与智能电网中的应用Python解析AI在能源管理与智能电网中的应用随着全球对可持续发展的重视和能源需求的不断增长,能源管理与智能电网技术正在成为研究和实践的重要领域。在这个背景下,人工智能(AI)作为一项前沿技术,正被广泛应用于能源管理与智能电网中,以提高效率、优化资源分配并减少环境影响。本文将探讨Python如何在这一领域中发挥作用,并解析其具体应用场
- 如何实现聊天模型响应流式处理
yunwu12777
langchain
在现代人工智能应用中,流式处理聊天模型的响应成为一种常见需求,特别是在需要实时输出或大规模处理时。本文将详细介绍如何在Python中实现聊天模型的同步和异步流式处理,使用langchain库中提供的ChatAnthropic模型作为示例。技术背景介绍流式处理是指从模型逐步获取输出,而不是等待整个输出完成。这对于处理长文本生成或需要动态响应的应用场景特别有用。langchain库中的聊天模型实现了R
- AI人工智能助力空间智能领域提升运营效率
AI智能探索者
AIAgent智能体开发实战人工智能网络ai
AI人工智能助力空间智能领域提升运营效率关键词:AI人工智能、空间智能领域、运营效率、智能算法、数据驱动摘要:本文聚焦于AI人工智能在空间智能领域的应用,旨在探讨其如何助力该领域提升运营效率。首先介绍了空间智能领域的背景和相关概念,阐述了AI在其中的核心作用和原理。接着详细讲解了相关核心算法,并结合数学模型进行分析。通过项目实战案例展示了AI在空间智能领域的具体应用和实现方式。同时探讨了实际应用场
- 人工智能的发展历程与未来展望
唐骁虎
ai
人工智能的发展历程与未来展望一、人工智能的起源与早期发展1.1人工智能的定义与概念起源人工智能(AI)的定义与概念起源可追溯至20世纪中叶,当时一群具有远见的科学家和工程师开始探索机器是否能够模拟人类智能行为。1956年,在达特茅斯会议上,约翰·麦卡锡首次提出了“人工智能”这一术语,标志着该领域的正式诞生。AI的定义涉及创建能够执行需要人类智能的任务的机器,如视觉感知、语音识别、决策和语言翻译等。
- DeepSeek:AI驱动的效率革命与实战案例解
weixin_45788582
人工智能aiDeepSeek
在人工智能技术的浪潮中,DeepSeek作为一款专注实现AGI(通用人工智能)的先锋工具,正通过其强大的自然语言处理(NLP)与分布式计算能力,重新定义高效办公的边界。以下通过技术解析与实战案例,展现DeepSeek如何赋能个人与企业,开启职场效率革命。一、技术革新:DeepSeek的核心竞争力深度学习赋能DeepSeek的技术架构基于BERT、Transformer等先进深度学习模型,通过构建复
- 如何让人工智能使你的工作效率一日千里
南风过闲庭
人工智能aipython
1.自动化重复性任务1.1识别并自动化日常任务提高工作效率的首要步骤是识别日常工作中重复性高且耗时的任务。根据麦肯锡全球研究院的报告,知识工作者大约有40%的时间花费在此类任务上。通过自动化这些任务,员工可以将更多时间投入到需要创造性思维和复杂决策的工作上。数据支持:一项针对500名知识工作者的调查显示,通过自动化日常任务,平均每天可以节省2小时的工作时间。这些任务包括数据录入、文件整理、邮件分类
- AI驱动的智能电网:平衡供需提高效率
AI智能应用
AI大模型应用入门实战与进阶javapythonjavascriptkotlingolang架构人工智能
智能电网,AI,机器学习,预测模型,优化算法,供需平衡,能源效率1.背景介绍随着全球能源需求的不断增长和可再生能源的快速发展,传统电网面临着越来越多的挑战。传统的电网结构是集中式供电,难以适应分布式能源的接入和负荷需求的波动性。智能电网应运而生,它利用先进的通信技术、传感器网络和数据分析技术,实现电网的自动化、智能化和可视化,从而提高电网的可靠性、效率和安全性。人工智能(AI)作为一种新兴技术,在
- RoomGPT: 人工智能驱动的室内设计革命
m0_56734068
人工智能
RoomGPT:用AI重新定义室内设计在当今数字化时代,人工智能正在改变各个行业的面貌,室内设计领域也不例外。RoomGPT作为一款革命性的AI驱动室内设计工具,正在彻底改变人们对室内空间进行创意和改造的方式。本文将深入探讨RoomGPT的工作原理、使用方法以及它为室内设计行业带来的变革。RoomGPT简介RoomGPT是一个开源项目,由GitHub用户Nutlope开发。它允许用户上传任何房间的
- 多模态融合相机L3CAM
moonsims
人工智能
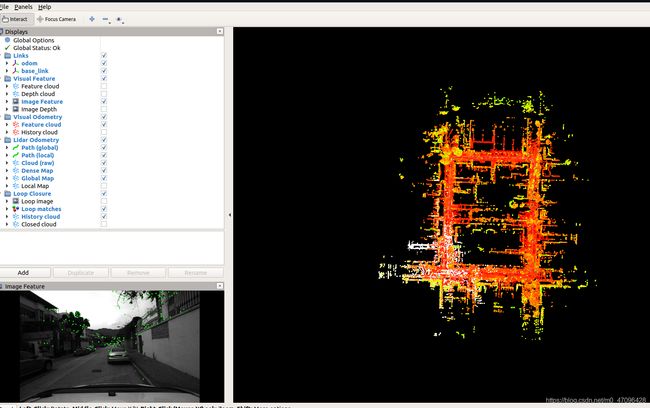
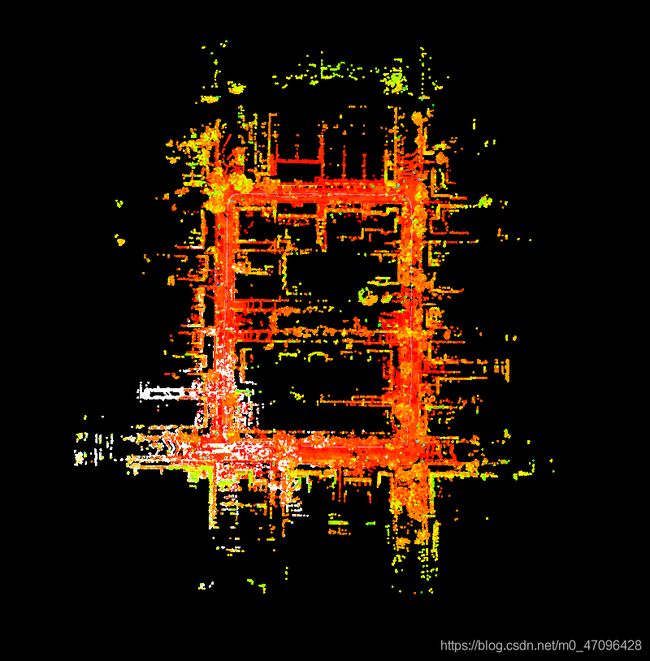
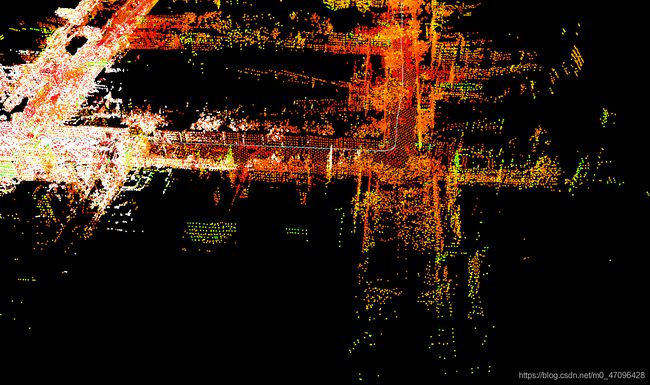
多模态融合相机L3CAML3CAM是Beamagine公司推出的多模态传感器融合技术,结合了激光雷达(LiDAR)和可见光摄像头,旨在为自动驾驶、工业机器人和其他需要精确环境感知的应用场景提供高效、安全的解决方案。L3CAM技术参数L3CAM结合了LiDAR和可见光摄像头,使其能够提供三维空间感知及图像级别的环境识别能力激光雷达部分(LiDAR)探测范围:大约200米(具体范围根据不同环境和反射面
- AI 技术&AI开发框架
34号树洞
人工智能深度学习人工智能机器学习NLPGAI
目录一、AI技术及其开发框架1.AI技术分类与代表方向2.主流AI开发框架3.AI应用开发流程简述4.补充:基础依赖与生态二、AI技术方向1.机器学习(MachineLearning,ML)✦核心概念:✦关键方法:✦应用案例:2.深度学习(DeepLearning,DL)✦核心概念:✦网络结构举例:✦技术趋势:3.自然语言处理(NLP)✦核心任务:✦代表模型:4.计算机视觉(ComputerVis
- 机器学习算法——神经网络1(神经元模型)
神经网络是由具有适应性的简单单元组成的广泛并行互连的网络,它的组织能够模拟生物神经系统对真实世界物体所作出的交互反应。神经网络中最基本的成分是神经元(neuron)模型。即上述定义中的“简单单元”。在生物神经网络中,每个神经元与其他申请元相连,当它“兴奋”时,就会向相连的神经元发送化学物质,从而改变这些神经元内的电位;如果某神经元的电位超过一个“阈值”,那么它就会被激活,即“兴奋”起来,向其他神经
- MCP如何助力智能交通系统?从数据融合到精准决策
Echo_Wish
Python进阶python开发语言
MCP如何助力智能交通系统?从数据融合到精准决策近年来,智能交通系统(ITS)正在全球范围内快速发展,它结合人工智能(AI)、物联网(IoT)和数据分析,致力于提高交通效率、减少拥堵、增强安全性。而MCP(Multi-ConstraintPathfinding,多约束路径寻优)技术作为一种复杂路径优化算法,在智能交通系统中扮演着重要角色,尤其是在导航优化、公共交通调度、应急响应等场景。今天,我们就
- AI如何提升个性化广告精准度——让投放更智能、更懂用户
Echo_Wish
前沿技术人工智能人工智能
AI如何提升个性化广告精准度——让投放更智能、更懂用户随着人工智能(AI)技术的发展,个性化广告已经从粗暴推送演变为智能匹配,广告主再也不想把预算砸给不感兴趣的人,而是精准触达有购买意向的用户。AI在广告投放中的核心优势在于深度数据分析、智能推荐、实时优化,让广告投放更精准、更有效。今天,我们就来聊聊AI如何提升个性化广告的精准度,并用Python代码演示其中的关键技术。1.为什么传统广告投放越来
- 道可云人工智能每日资讯|江苏首个机器人训练中心在苏州吴江启动
道可云
道可云人工智能人工智能机器人arDeepSeekxr百度
道可云人工智能&元宇宙每日简报(2025年6月26日)讯,今日人工智能&元宇宙新鲜事有:江苏首个机器人训练中心在苏州吴江启动近日,长三角一体化示范区智能机器人训练中心在东太湖度假区(太湖新城)正式启用,成为江苏省首个机器人智能训练中心。该中心占地1500平方米,设有8个训练场景和30个生产工位,涵盖智能制造、商业服务、特种应用三大领域,年产数据可超200万条,旨在加速机器人从实验室走向真实产业场景
- 道可云人工智能每日资讯|《辽宁省促进人工智能创新发展实施方案》发布
道可云
道可云人工智能人工智能arDeepSeekxr
道可云人工智能&元宇宙每日简报(2025年6月13日)讯,今日人工智能&元宇宙新鲜事有:《辽宁省促进人工智能创新发展实施方案》发布近日,辽宁省人民政府办公厅印发《辽宁省促进人工智能创新发展实施方案》。根据《实施方案》可知,到2027年,实现以沈阳、大连“双核”牵引辐射带动,各地协同共进,千行百业深度赋能,打造人工智能创新发展和融合应用的新高地。人工智能赋能可持续发展论坛于成都市天府国际会议中心举办
- Python在自动驾驶中的多传感器融合——让智能汽车“看得更清楚”
Echo_Wish
Python!实战!python自动驾驶汽车
Python在自动驾驶中的多传感器融合——让智能汽车“看得更清楚”在自动驾驶技术的演进过程中,多传感器融合(Multi-SensorFusion)是不可或缺的一环。单一传感器往往存在局限性,例如摄像头怕光线变化,激光雷达价格昂贵,毫米波雷达分辨率有限,但如果将它们结合起来,就能形成一个更全面、更可靠的环境感知系统。今天,我们就来聊聊如何用Python实现自动驾驶中的多传感器融合,并结合最新技术趋势
- Java开发中,spring mvc 的线程怎么调用?
小麦麦子
springmvc
今天逛知乎,看到最近很多人都在问spring mvc 的线程http://www.maiziedu.com/course/java/ 的启动问题,觉得挺有意思的,那哥们儿问的也听仔细,下面的回答也很详尽,分享出来,希望遇对遇到类似问题的Java开发程序猿有所帮助。
问题:
在用spring mvc架构的网站上,设一线程在虚拟机启动时运行,线程里有一全局
- maven依赖范围
bitcarter
maven
1.test 测试的时候才会依赖,编译和打包不依赖,如junit不被打包
2.compile 只有编译和打包时才会依赖
3.provided 编译和测试的时候依赖,打包不依赖,如:tomcat的一些公用jar包
4.runtime 运行时依赖,编译不依赖
5.默认compile
依赖范围compile是支持传递的,test不支持传递
1.传递的意思是项目A,引用
- Jaxb org.xml.sax.saxparseexception : premature end of file
darrenzhu
xmlprematureJAXB
如果在使用JAXB把xml文件unmarshal成vo(XSD自动生成的vo)时碰到如下错误:
org.xml.sax.saxparseexception : premature end of file
很有可能时你直接读取文件为inputstream,然后将inputstream作为构建unmarshal需要的source参数。InputSource inputSource = new In
- CSS Specificity
周凡杨
html权重Specificitycss
有时候对于页面元素设置了样式,可为什么页面的显示没有匹配上呢? because specificity
CSS 的选择符是有权重的,当不同的选择符的样式设置有冲突时,浏览器会采用权重高的选择符设置的样式。
规则:
HTML标签的权重是1
Class 的权重是10
Id 的权重是100
- java与servlet
g21121
servlet
servlet 搞java web开发的人一定不会陌生,而且大家还会时常用到它。
下面是java官方网站上对servlet的介绍: java官网对于servlet的解释 写道
Java Servlet Technology Overview Servlets are the Java platform technology of choice for extending and enha
- eclipse中安装maven插件
510888780
eclipsemaven
1.首先去官网下载 Maven:
http://www.apache.org/dyn/closer.cgi/maven/binaries/apache-maven-3.2.3-bin.tar.gz
下载完成之后将其解压,
我将解压后的文件夹:apache-maven-3.2.3,
并将它放在 D:\tools目录下,
即 maven 最终的路径是:D:\tools\apache-mave
- jpa@OneToOne关联关系
布衣凌宇
jpa
Nruser里的pruserid关联到Pruser的主键id,实现对一个表的增删改,另一个表的数据随之增删改。
Nruser实体类
//*****************************************************************
@Entity
@Table(name="nruser")
@DynamicInsert @Dynam
- 我的spring学习笔记11-Spring中关于声明式事务的配置
aijuans
spring事务配置
这两天学到事务管理这一块,结合到之前的terasoluna框架,觉得书本上讲的还是简单阿。我就把我从书本上学到的再结合实际的项目以及网上看到的一些内容,对声明式事务管理做个整理吧。我看得Spring in Action第二版中只提到了用TransactionProxyFactoryBean和<tx:advice/>,定义注释驱动这三种,我承认后两种的内容很好,很强大。但是实际的项目当中
- java 动态代理简单实现
antlove
javahandlerproxydynamicservice
dynamicproxy.service.HelloService
package dynamicproxy.service;
public interface HelloService {
public void sayHello();
}
dynamicproxy.service.impl.HelloServiceImpl
package dynamicp
- JDBC连接数据库
百合不是茶
JDBC编程JAVA操作oracle数据库
如果我们要想连接oracle公司的数据库,就要首先下载oralce公司的驱动程序,将这个驱动程序的jar包导入到我们工程中;
JDBC链接数据库的代码和固定写法;
1,加载oracle数据库的驱动;
&nb
- 单例模式中的多线程分析
bijian1013
javathread多线程java多线程
谈到单例模式,我们立马会想到饿汉式和懒汉式加载,所谓饿汉式就是在创建类时就创建好了实例,懒汉式在获取实例时才去创建实例,即延迟加载。
饿汉式:
package com.bijian.study;
public class Singleton {
private Singleton() {
}
// 注意这是private 只供内部调用
private static
- javascript读取和修改原型特别需要注意原型的读写不具有对等性
bijian1013
JavaScriptprototype
对于从原型对象继承而来的成员,其读和写具有内在的不对等性。比如有一个对象A,假设它的原型对象是B,B的原型对象是null。如果我们需要读取A对象的name属性值,那么JS会优先在A中查找,如果找到了name属性那么就返回;如果A中没有name属性,那么就到原型B中查找name,如果找到了就返回;如果原型B中也没有
- 【持久化框架MyBatis3六】MyBatis3集成第三方DataSource
bit1129
dataSource
MyBatis内置了数据源的支持,如:
<environments default="development">
<environment id="development">
<transactionManager type="JDBC" />
<data
- 我程序中用到的urldecode和base64decode,MD5
bitcarter
cMD5base64decodeurldecode
这里是base64decode和urldecode,Md5在附件中。因为我是在后台所以需要解码:
string Base64Decode(const char* Data,int DataByte,int& OutByte)
{
//解码表
const char DecodeTable[] =
{
0, 0, 0, 0, 0, 0
- 腾讯资深运维专家周小军:QQ与微信架构的惊天秘密
ronin47
社交领域一直是互联网创业的大热门,从PC到移动端,从OICQ、MSN到QQ。到了移动互联网时代,社交领域应用开始彻底爆发,直奔黄金期。腾讯在过去几年里,社交平台更是火到爆,QQ和微信坐拥几亿的粉丝,QQ空间和朋友圈各种刷屏,写心得,晒照片,秀视频,那么谁来为企鹅保驾护航呢?支撑QQ和微信海量数据背后的架构又有哪些惊天内幕呢?本期大讲堂的内容来自今年2月份ChinaUnix对腾讯社交网络运营服务中心
- java-69-旋转数组的最小元素。把一个数组最开始的若干个元素搬到数组的末尾,我们称之为数组的旋转。输入一个排好序的数组的一个旋转,输出旋转数组的最小元素
bylijinnan
java
public class MinOfShiftedArray {
/**
* Q69 旋转数组的最小元素
* 把一个数组最开始的若干个元素搬到数组的末尾,我们称之为数组的旋转。输入一个排好序的数组的一个旋转,输出旋转数组的最小元素。
* 例如数组{3, 4, 5, 1, 2}为{1, 2, 3, 4, 5}的一个旋转,该数组的最小值为1。
*/
publ
- 看博客,应该是有方向的
Cb123456
反省看博客
看博客,应该是有方向的:
我现在就复习以前的,在补补以前不会的,现在还不会的,同时完善完善项目,也看看别人的博客.
我刚突然想到的:
1.应该看计算机组成原理,数据结构,一些算法,还有关于android,java的。
2.对于我,也快大四了,看一些职业规划的,以及一些学习的经验,看看别人的工作总结的.
为什么要写
- [开源与商业]做开源项目的人生活上一定要朴素,尽量减少对官方和商业体系的依赖
comsci
开源项目
为什么这样说呢? 因为科学和技术的发展有时候需要一个平缓和长期的积累过程,但是行政和商业体系本身充满各种不稳定性和不确定性,如果你希望长期从事某个科研项目,但是却又必须依赖于某种行政和商业体系,那其中的过程必定充满各种风险。。。
所以,为避免这种不确定性风险,我
- 一个 sql优化 ([精华] 一个查询优化的分析调整全过程!很值得一看 )
cwqcwqmax9
sql
见 http://www.itpub.net/forum.php?mod=viewthread&tid=239011
Web翻页优化实例
提交时间: 2004-6-18 15:37:49 回复 发消息
环境:
Linux ve
- Hibernat and Ibatis
dashuaifu
Hibernateibatis
Hibernate VS iBATIS 简介 Hibernate 是当前最流行的O/R mapping框架,当前版本是3.05。它出身于sf.net,现在已经成为Jboss的一部分了 iBATIS 是另外一种优秀的O/R mapping框架,当前版本是2.0。目前属于apache的一个子项目了。 相对Hibernate“O/R”而言,iBATIS 是一种“Sql Mappi
- 备份MYSQL脚本
dcj3sjt126com
mysql
#!/bin/sh
# this shell to backup mysql
#
[email protected] (QQ:1413161683 DuChengJiu)
_dbDir=/var/lib/mysql/
_today=`date +%w`
_bakDir=/usr/backup/$_today
[ ! -d $_bakDir ] && mkdir -p
- iOS第三方开源库的吐槽和备忘
dcj3sjt126com
ios
转自
ibireme的博客 做iOS开发总会接触到一些第三方库,这里整理一下,做一些吐槽。 目前比较活跃的社区仍旧是Github,除此以外也有一些不错的库散落在Google Code、SourceForge等地方。由于Github社区太过主流,这里主要介绍一下Github里面流行的iOS库。 首先整理了一份
Github上排名靠
- html wlwmanifest.xml
eoems
htmlxml
所谓优化wp_head()就是把从wp_head中移除不需要元素,同时也可以加快速度。
步骤:
加入到function.php
remove_action('wp_head', 'wp_generator');
//wp-generator移除wordpress的版本号,本身blog的版本号没什么意义,但是如果让恶意玩家看到,可能会用官网公布的漏洞攻击blog
remov
- 浅谈Java定时器发展
hacksin
java并发timer定时器
java在jdk1.3中推出了定时器类Timer,而后在jdk1.5后由Dou Lea从新开发出了支持多线程的ScheduleThreadPoolExecutor,从后者的表现来看,可以考虑完全替代Timer了。
Timer与ScheduleThreadPoolExecutor对比:
1.
Timer始于jdk1.3,其原理是利用一个TimerTask数组当作队列
- 移动端页面侧边导航滑入效果
ini
jqueryWebhtml5cssjavascirpt
效果体验:http://hovertree.com/texiao/mobile/2.htm可以使用移动设备浏览器查看效果。效果使用到jquery-2.1.4.min.js,该版本的jQuery库是用于支持HTML5的浏览器上,不再兼容IE8以前的浏览器,现在移动端浏览器一般都支持HTML5,所以使用该jQuery没问题。HTML文件代码:
<!DOCTYPE html>
<h
- AspectJ+Javasist记录日志
kane_xie
aspectjjavasist
在项目中碰到这样一个需求,对一个服务类的每一个方法,在方法开始和结束的时候分别记录一条日志,内容包括方法名,参数名+参数值以及方法执行的时间。
@Override
public String get(String key) {
// long start = System.currentTimeMillis();
// System.out.println("Be
- redis学习笔记
MJC410621
redisNoSQL
1)nosql数据库主要由以下特点:非关系型的、分布式的、开源的、水平可扩展的。
1,处理超大量的数据
2,运行在便宜的PC服务器集群上,
3,击碎了性能瓶颈。
1)对数据高并发读写。
2)对海量数据的高效率存储和访问。
3)对数据的高扩展性和高可用性。
redis支持的类型:
Sring 类型
set name lijie
get name lijie
set na
- 使用redis实现分布式锁
qifeifei
在多节点的系统中,如何实现分布式锁机制,其中用redis来实现是很好的方法之一,我们先来看一下jedis包中,有个类名BinaryJedis,它有个方法如下:
public Long setnx(final byte[] key, final byte[] value) {
checkIsInMulti();
client.setnx(key, value);
ret
- BI并非万能,中层业务管理报表要另辟蹊径
张老师的菜
大数据BI商业智能信息化
BI是商业智能的缩写,是可以帮助企业做出明智的业务经营决策的工具,其数据来源于各个业务系统,如ERP、CRM、SCM、进销存、HER、OA等。
BI系统不同于传统的管理信息系统,他号称是一个整体应用的解决方案,是融入管理思想的强大系统:有着系统整体的设计思想,支持对所有
- 安装rvm后出现rvm not a function 或者ruby -v后提示没安装ruby的问题
wudixiaotie
function
1.在~/.bashrc最后加入
[[ -s "$HOME/.rvm/scripts/rvm" ]] && source "$HOME/.rvm/scripts/rvm"
2.重新启动terminal输入:
rvm use ruby-2.2.1 --default
把当前安装的ruby版本设为默