OpenSCENARIO场景标准,自动驾驶仿真新的分水岭
随着自动驾驶的“场景化”趋势愈加明显,场景描述对于测试、验证自动驾驶汽车的安全性至关重要。但在实际发展过程中,各整车厂、供应商以及仿真工具商使用的数据格式与接口五花八门,很难统一标准。
基于此,德国自动化及测量系统标准协会(ASAM)推出了仿真领域的OpenX系列标准,并获得了全球的关注。其中,OpenSCENARIO场景标准应运而生。
▲仿真工具间通过OpenSCENARIO交换场景
相应地,国内C-ASAM工作组由中汽中心联合ASAM共同成立,也在积极筹划中国特色的场景标准,定期向国内成员更新ASAM标准研究进展,促进国际合作。
Part.1
什么是OpenSCENARIO 标准场景
是行驶场合和驾驶情景的组合,是在一定时间和空间范围内环境与驾驶行为的综合反映,描述了道路、交通设施、气象条件、交通参与物等外部状态以及自车的驾驶任务和状态等信息。
天马项目(PEGASUS)将场景模型分为六层,分别是第1层为道路层;第2层为交通基础设施;第3层为第1层和第2层的临时操作;第4层为对象;第5层为环境;第6层为数字信息。
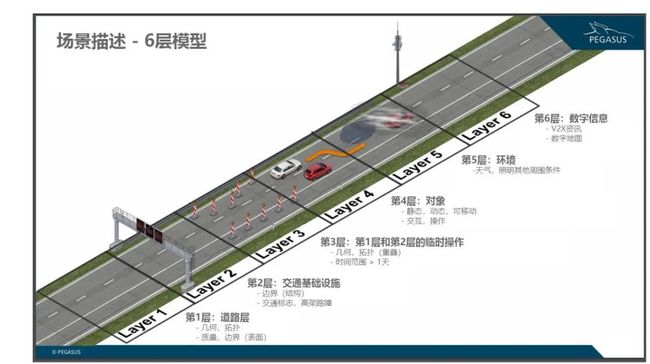
▲PEGASUS 6层模型场景,天马项目截图引自①
OpenSCENARIO定义了一个标准的仿真测试场景格式,具体用于描述驾驶模拟应用程序中动态内容,兼容不同的仿真测试软件。适用场景主要包括动作、轨迹(多段线、回旋线)、车辆(几何、类型、轴、性能)、驾驶员(状态)、环境(天气、时间、路况)等。

▲OpenSCENARIO将内容带到路上,截图引自②
OpenSCENARIO中用于动作描述的数据以分层结构组织,并以XML文件格式序列化。XML文件可以通过仿真工具和内容编辑器轻松地进行验证和编辑,导入和导出。该格式与技术和供应商无关。 在ASAM的OpenX中,OpenSCENARIO描述动态内容,OpenDRIVE描述静态内容的路网,OpenCRG描述静态内容的路面。这三个标准互为补充,涵盖了在环车辆仿真应用中的静态和动态内容。
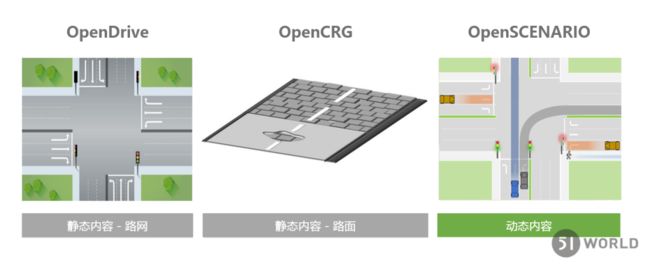
▲OpenX三大标准
OpenSCENARIO场景简单描述就是:谁什么时候在哪儿干什么。在描述的过程中还涉及非常具体的分层结构,比如,在完整的场景描述中,从故事、幕、动作组合、动作、事件,再到相应行动的触发和执行。
然而,随着大数据和 AI 的发展,这种方式已经不足以覆盖如今的测试需求。因此,需要更高级别的场景描述-领域特定语言(DSL, Domain Specific Language)来进行描述,即一套自动驾驶仿真测领域专用的语言。这套DSL语言应该覆盖开发者、认证机构、工具提供商、场景生成者等多方参与者需求。它是 OpenSCENARIO2.0标准的核心。
Part.2
OpenSCENARIO 1.0
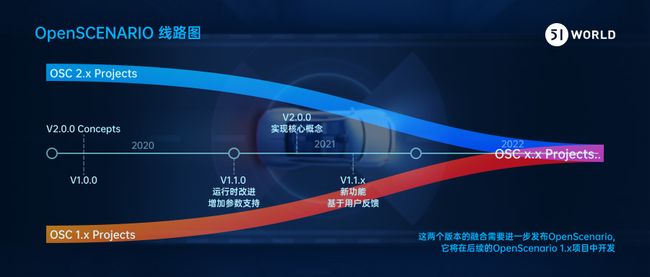
今年3月,OpenSCENARIO1.0版本与2.0概念版相继发布,后续的1.x和2.0版本的制定也在同步进行中。
1、OpenSCENARIO1.0基本概
场景的基础概念是“谁在哪里做什么”,即实体在路网上根据故事板中定义的一组指令进行交互。如下图所示,五个基本概念。实体(Entity),指的是车辆行人等参与者,即“谁”。路网(RoadNetwork),指的是静态驾驶基础设施,包括OpenDrive,交通信号,环境模型等,即“在哪里”。故事板(Storyboard),指的是完整的场景描述,即“谁做什么”。另外两个附加概念是参数声明(ParameterDeclaration)和目录位置(CatalogLocations),其目的是在多个用例间复用。
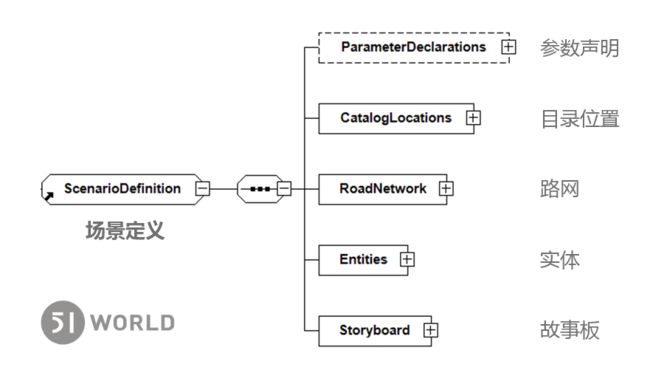
其中,场景故事板(Storyboard)包含的至少一个故事(Story)。故事包含以下层次结构基本元素:
-
Story,故事,包含不同方面的高层次结构,包含至少一个Act;
-
Act,幕,定义了条件行为组,包含至少一个ManeuverGroup;
-
ManeuverGroup,动作组,回答谁正在做什么,连接Actor和Maneuver;
-
Maneuver,动作,事件组,包含至少一个Event;
-
Event,事件,条件触发动作,包含开始触发器和至少一个Action;
-
Action,行动,用于创建或修改场景的动态元素。
条件(Condition)触发角色(Actor,即Entity实例)的行动。条件用于触发器(Trigger)中启动事件或停止故事板,是定义动态行为和相互作用的基本构建块。
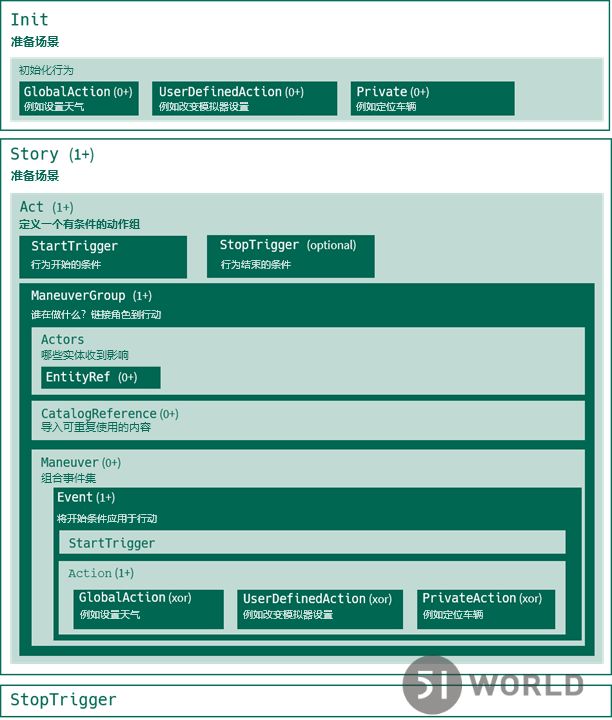
▲故事板的层次结构
2、OpenSCENARIO 1.0场景示例 - 变道
变道场景描述了主车(Ego)在一辆以相同速度行驶的对手车C2后面的最右边车道上行驶,并留有空隙。更快的对手车C1在最中央的车道上从后方接近主车。C1经过主车后变道到最右边车道的缝隙。为了避免与在Ego车辆前面行驶的C2发生碰撞,它会立即变回中央车道。
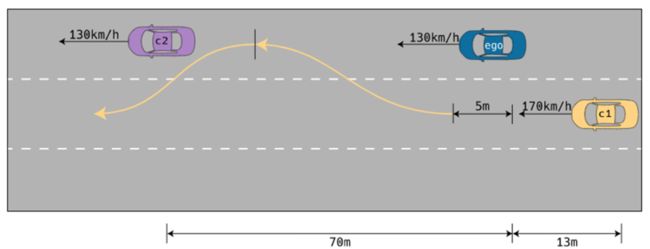
▲变道场景使用条件触发连续执变道动作示意图
▲51Sim-One1.2版本两次变道场景
目前,ASAM官方提供了OpenSCENARIO1.0标准文档和案例,但并没有提供验证工具,用户可使用支持OpenSCENARIO1.0的51Sim-One1.2版本仿真平台进行尝鲜体验。
Part.3
51Sim-One1.2支持OpenSCENARIO 1.0
作为自动驾驶仿真领域的自主研发先锋,51Sim-One1.2版本率先支持OpenSCENARIO 1.0国际标准,进一步深化行业场景的标准化落地,并基于核心功能进行了持续拓展和增强。
1、内置OpenSCENARIO1.0官方案例
51Sim-One1.2版本率先支持OpenSCENARIO 1.0标准。首次实现了OpenSCENARIO案例的解析和运行,并内置了9个ASAM官方发布的应用案例,最大限度进行标准同步。
只需要选择运行即可体验最新的OpenSCENARIO1.0标准场景,以下是交叉路口同步到达(Synchronized Arrival at Intersection)场景。
2、支持OpenSCENARIO自定义上传
51Sim-One 1.2版本同时还支持用户自定义上传OpenSCENARIO场景,选择或上传OpenDrive地图,自动生成道路,交通标志和环境(花坛,树,楼,天气等)。
OpenSCENARIO仅指定如何引用外部3D环境模型,并未指定其他详细信息,如文件格式或模型结构。简单地说,osgb或者fbx等3D模型格式并不在OpenSCENARIO标准中。51Sim-One通过OpenDrive自动化生成高质量的3D场景,让用户从3D模型中解放出来,提高效率节约成本。
实采数据也可通过51Sim-One工具链自动转成OpenSCENARIO场景后,自定义上传Sim-One平台运行。
▲交通事故还原场景
▲连续变道造成堵车场景
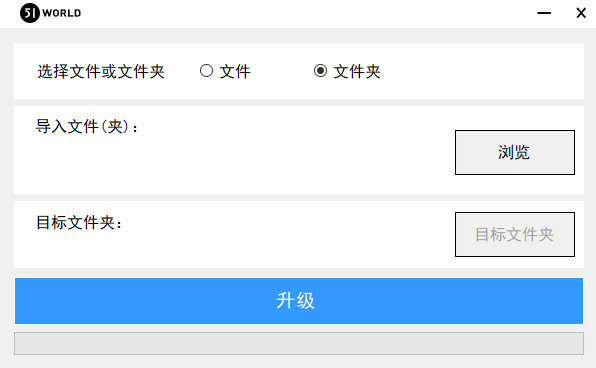
3、支持OpenSCENARIO 0.9.1升级到1.0
OpenSCENARIO 1. 0对0.9.1版本不向后兼容性,ASAM提供了XSLT迁移脚本。对于OpenSCENARIO 0.9.1,51Sim-One提供升级工具将其升级到1.0。
Part.4
51WORLD和ASAM紧密合作
2018年,51WORLD对外发布了全国第一款全模块自动驾驶仿真测试平台51Sim-One。从此也开启了与ASAM的紧密合作。
51WORLD作为国际组织 ASAM 会员单位、C-ASAM会员单位正走在行业工作的前列,派遣技术专家在OpenSCENARIO 1.x 工作组展开国际化的协作开发,为场景标准贡献力量。

ASAM2019年度会议51WORLD赠仿真蓝皮书英文版给ASAM董事会主席Marcus
51Sim-One第一时间支持OpenSCENARIO1.0,已经开始为客户和合作伙伴提供服务。51WORLD加入OpenSCENARIO1.x项目组,利用51Sim-One仿真测试平台的特色,和来自世界各地专家一起制定OpenSCENARIO1.x标准,并在51Sim-One平台验证。
在实际的项目过程中,51WORLD对于中国特色的场景功能,将提案到C-ASAM一起推动中国特色场景标准制定,同步合适的提案提交ASAM国际标准。对于OpenSCENARIO 2.0,51WORLD同步保持关注DSL并及时跟进。
此外,对于ASAM OpenX其他标准,51WORLD也在积极参与并及时跟进,比如仿真接口标准OSI,标注OpenLABEL,有条件范围的OpenODD,方法论的OpenXOntology等。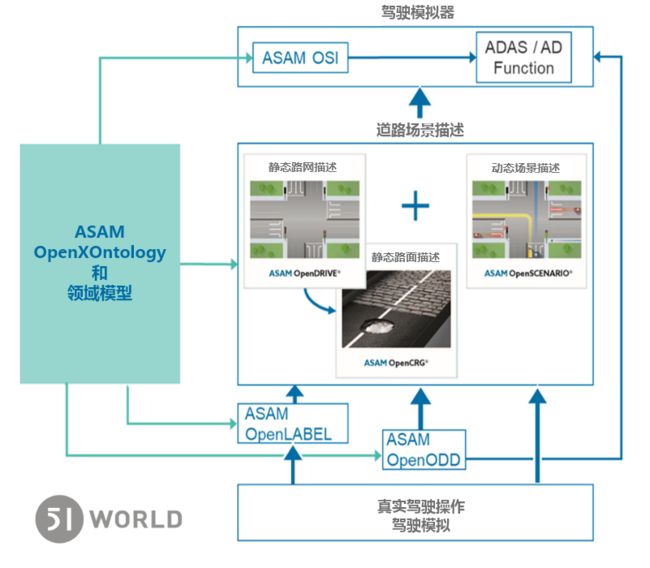
在推动场景标准落地、场景挖掘、定制化场景库等领域,51WORLD正在积极发挥价值,努力通过产业化实现场景测试的市场化高效运作。
随着自动驾驶仿真逐渐走入新的“分水岭”——“规模”、“场景”、“运营”等成为新的关键词。如何在变革中抓住新的发展机会,还需要企业和业界共同去探索。
资料引用:
①https://www.pegasusprojekt.de/files/tmpl/Symposium2019/PEGASUS_Symposium_3_5_years.pdf
②http://www.openscenario.org/docs/OpenSCENARIO_Poster_DSC2015.pdf
-end-