connectedComponentsWithStats与connectedComponents函数(opencv联通组件)
文章目录
- 联通组件
-
- 图像联通组件标记概念
-
- 图像联通组件(CCL)
-
- 四领域与八领域
- 扫描联通组件的常见算法
-
- 概念
- 基于像素扫描算法
- 基于块扫描方法
- 两步扫描法
- DT算法:决策表+模板
- BBDT算法(opencv采用的算法)
- 函数API
-
- connectedComponents
- connectedComponentsWithStats
联通组件
图像联通组件标记概念
图像联通组件(CCL)
四领域与八领域

扫描联通组件的常见算法
概念
联通组件标记算法是图像分析中最常用的算法之一,算法的实质是扫描二值图像的每个像素点,对于像素值相同的而且相互连通分为相同的组(group),最终得到图像中所有的像素连通组件。扫描的方式可以是从上到下,从左到右,对于一幅有N个像素的图像来说,最大连通组件个数为N/2。扫描是基于每个像素单位,OpenCV中进行连通组件扫码调用的时候必须保证背景像素是黑色、前景像素是白色。
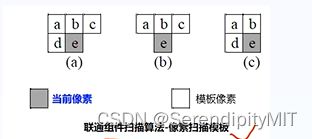
基于像素扫描算法
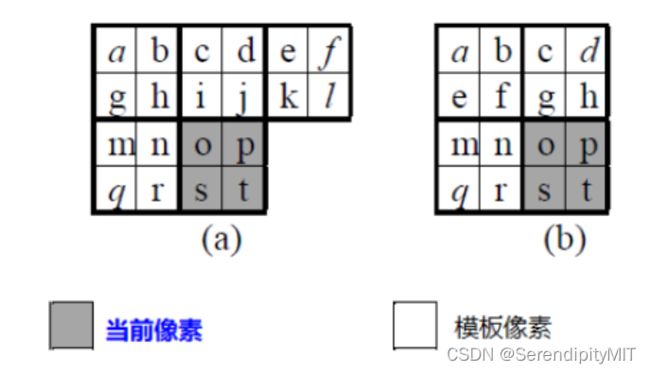
基于块扫描方法
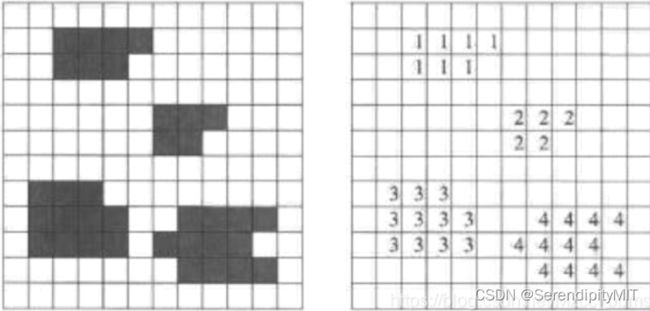
两步扫描法
原二值图像:

1.从上到下,从左到右,扫描像素点,并进行标记,统计等价队列标签(讲每一个联通组件的内部序号划分在一个列表内,比如左边的1 3 5一组 2 4 6一组)

2.选择每个等价队列标签中最小的标签作为联通组件的标签(用列表内最小值的数字代替组件内所有标号)

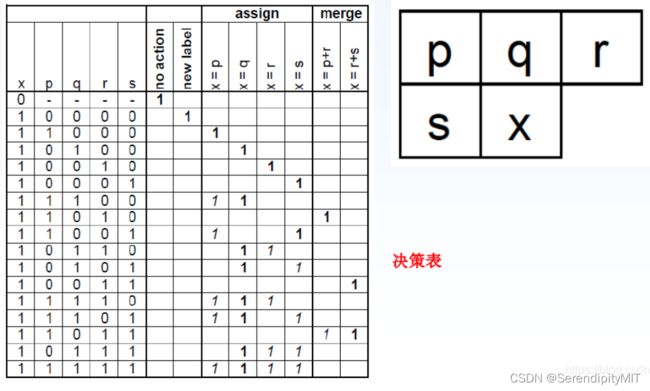
DT算法:决策表+模板
BBDT算法(opencv采用的算法)

函数API
connectedComponents
//不带统计信息
int cv::connectedComponents(
InputArray image, // 输入二值图像,黑色背景
OutputArray labels, // 输出的标记图像,背景index=0
int connectivity = 8, // 连通域,默认是8连通
int ltype = CV_32S // 输出的labels类型,默认是CV_32S
)
实例:
代码如下:
#include结果如下:

connectedComponentsWithStats
//带统计信息
int cv::connectedComponentsWithStats(
InputArray image, // 输入二值图像,黑色背景
OutputArray labels, // 输出的标记图像,背景index = 0
OutputArray stats, // 统计信息,包括每个组件的位置、宽、高与面积
OutputArray centroids, // 每个组件的中心位置坐标cx, cy
int connectivity, // 寻找连通组件算法的连通域,默认是8连通
int ltype, // 输出的labels的Mat类型CV_32S
int ccltype // 连通组件算法
)
其中stats包括以下枚举类型数据信息:
CC_STAT_LEFT :组件的左上角点像素点坐标的X位置
CC_STAT_TOP :组件的左上角点像素点坐标的Y位置
CC_STAT_WIDTH:组件外接矩形的宽度
CC_STAT_HEIGHT:组件外接矩形的高度
CC_STAT_AREA :当前连通组件的面积(像素单位面积)
实例:
代码如下:
#include结果如下:

以上某些图片来自于他人博客
SERENDIPITY