计算机视觉与深度学习-卷积&图像去噪&边缘提取
1 图像去噪与卷积
1.1 卷积定义
卷积的定义:令F为图像,H为卷积核,F与H的卷积记为R = F * H
R i j _{ij} ij = ∑ u , v \sum\limits_{u,v} u,v∑H i − u , j − v _{i-u,j-v} i−u,j−vF u , v _{u,v} u,v
1.2 卷积性质
- 叠加性:filter(f 1 _{1} 1 + f 2 _{2} 2)=filter(f 1 _{1} 1)+filter(f 2 _{2} 2)
- 平移不变性: filter(shift(f))=shift(filter(f))
- 交换律:a * b = b * a
- 结合律:a * (b * c) = (a * b) * c
- 分配律:a * (b + c) = (a * b) + (a * c)
- 标量:ka * b = a * kb = k(a * b)
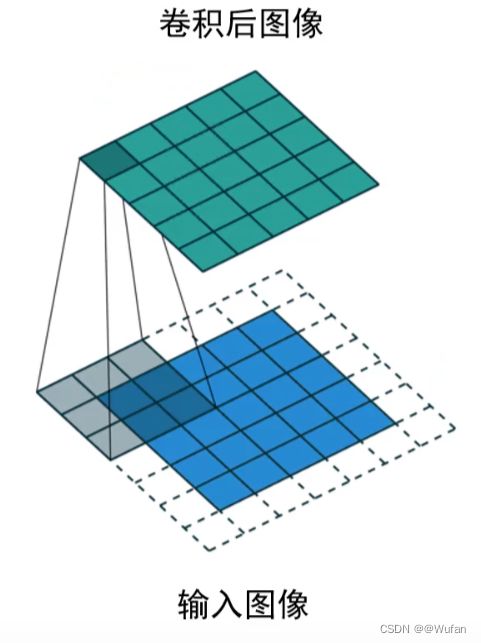
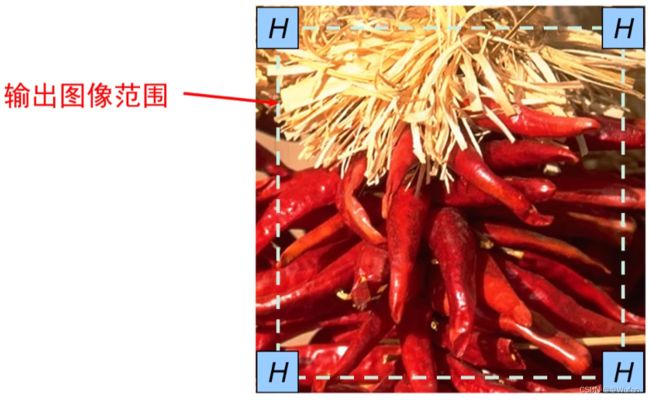
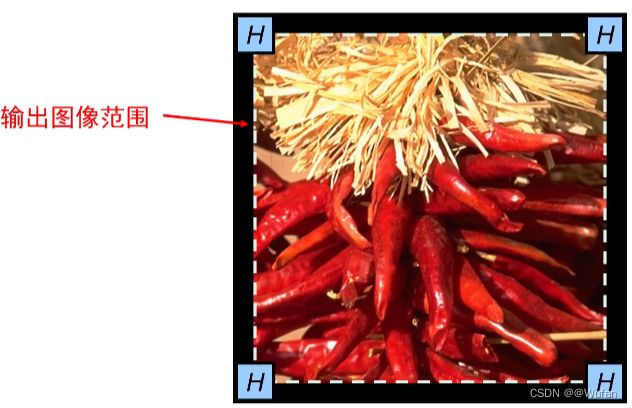
1.3 边界填充
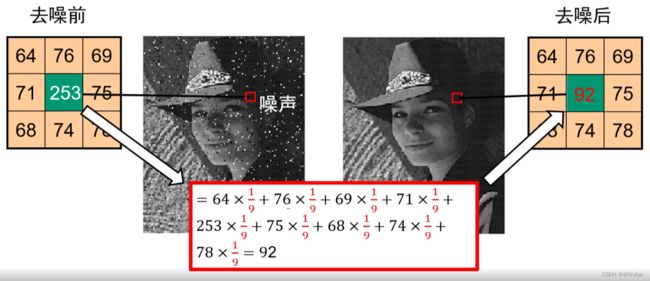
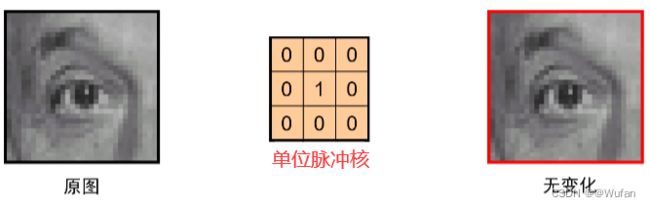
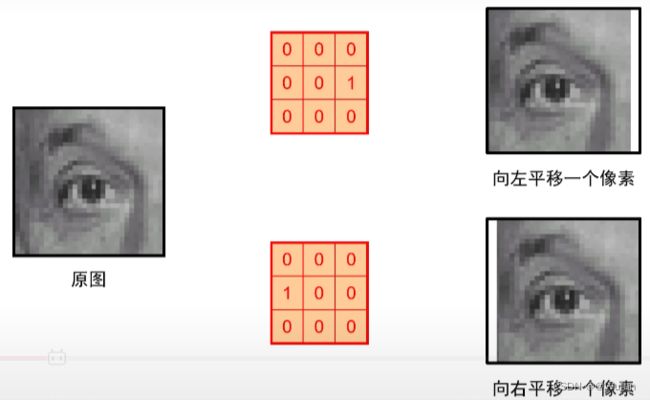
1.4 卷积示例
1.5 小结
- 卷积操作后的图像要小于输入时图像,通过边界填充,我们可以实现卷积前后图像的尺寸不变;
- 一种最常用的边界填充就是常数填充。
2 高斯卷积核
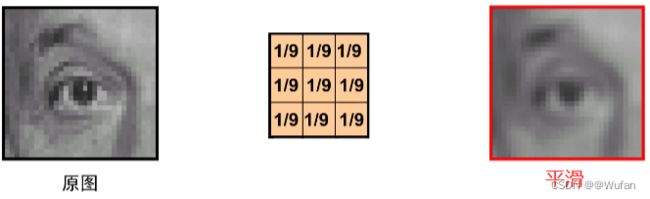
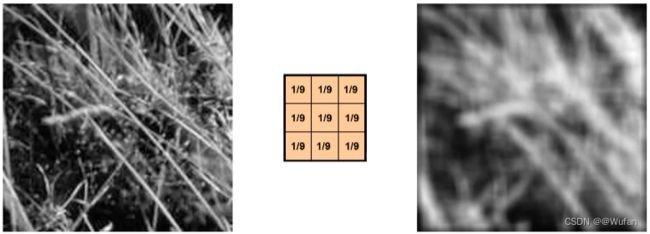
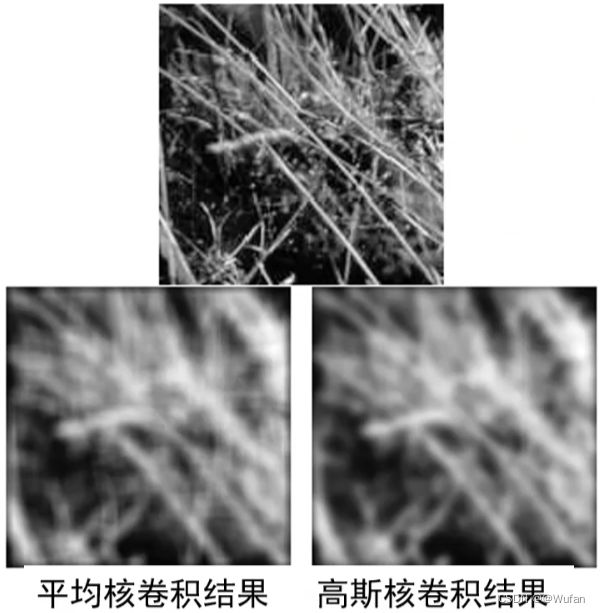
2.1 平均卷积核存在的问题
振铃:卷积后的图像产生了一些水平和垂直方向的条状
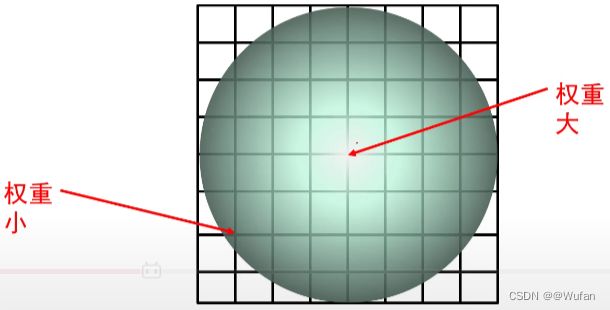
2.2 平均卷积核的解决方法
:根据领域像素与中心的远近程度分配权重
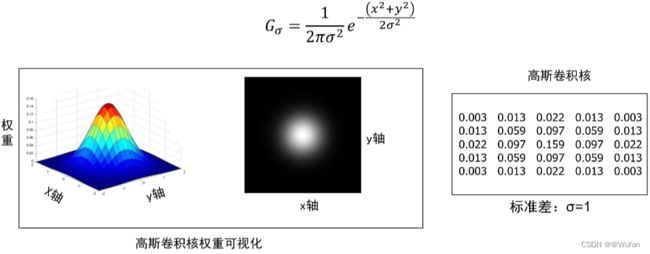
2.3 高斯卷积核的生成步骤
1)确定卷积核的尺寸,比如5 * 5
2)设置高斯函数的标准差,比如 σ \sigma σ = 1
G σ G_{\sigma} Gσ = 1 2 π σ 2 \frac{1}{2\pi\sigma^2} 2πσ21 e − x 2 + y 2 2 σ 2 e^{-\frac{x^2+y^2}{2\sigma^2}} e−2σ2x2+y2
3)计算卷积核各个位置权重值
4)对权重值进行归一化
2.4 高斯卷积核的参数设置
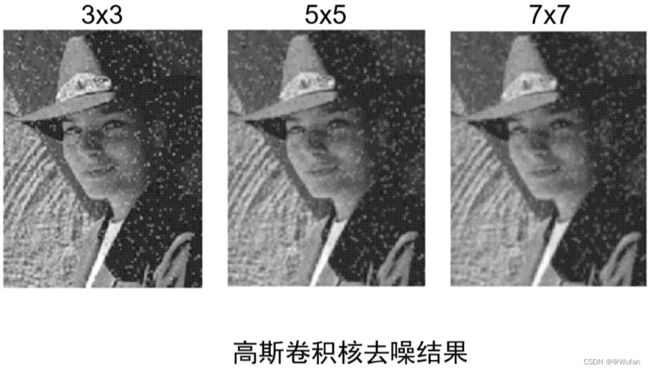
1)卷积核的尺寸

模板尺寸越大,平滑效果越强
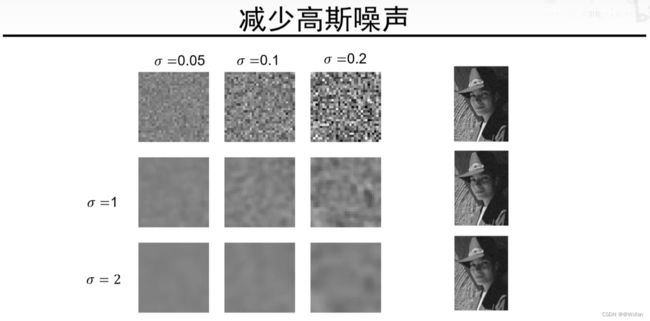
2)高斯函数的标准差
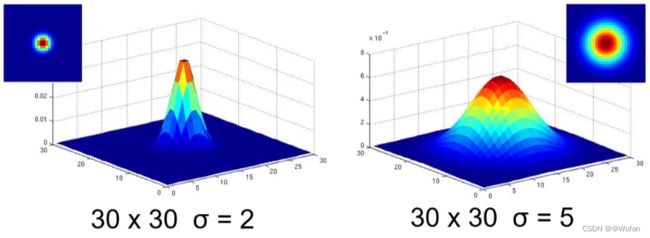
方差越大,平滑效果越明显
2.5 高斯卷积核的参数小结
- 大方差或者大尺寸卷积核平滑能力强
- 小方差或者小尺寸卷积核平滑能力弱
- 经验法则:将卷积核的半窗宽度设置为3 σ \sigma σ,最终卷积模板尺寸为2 * 3 σ \sigma σ + 1
例:标准差设置成1,卷积模板宽度=231 + 1 = 7
2.6 高斯卷积核 vs. 平均卷积核
2.7 高斯卷积核
- 去除图像中的“高频”成分(低通滤波器)
- 两个高斯卷积核卷积后得到的还是高斯卷积核
- 使用多次小方差卷积核连续卷积,可以得到与大方差卷积核相同的结果
- 使用标准差为 σ \sigma σ 的高斯核进行两次卷积与使用标准差 σ 2 \sigma\sqrt{2} σ2的高斯核进行一次卷积相同
- 可分离
- 可分解为两个一维高斯的乘积
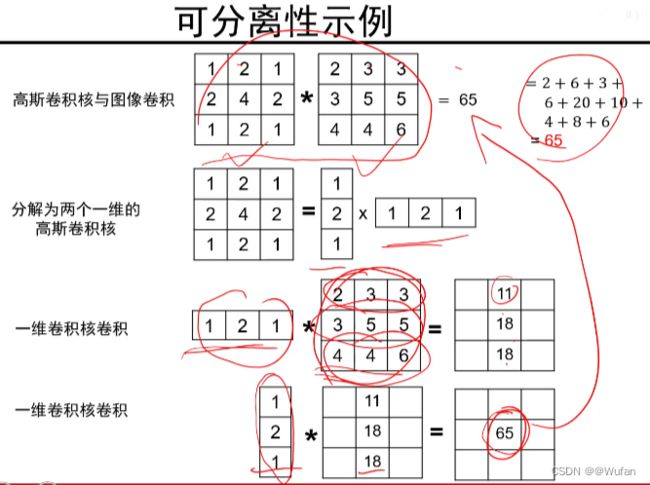
- 可分解为两个一维高斯的乘积
2.8 卷积操作运算量
1)用尺寸为m * m的卷积核卷积一个尺寸为n * nd的图像,其计算复杂度是多少?
答:O( n 2 m 2 n^2m^2 n2m2)
2)如果核可分离呢?
答:O( n 2 m n^2m n2m)
1.2.8 小结
高斯卷积核,它能够有效地抑制噪声、实现图像平滑。同时,高斯卷积核的堆叠以及分解,都可以用于减少卷积计算的复杂度。
3 图像噪声与滤波器
3.1 噪声

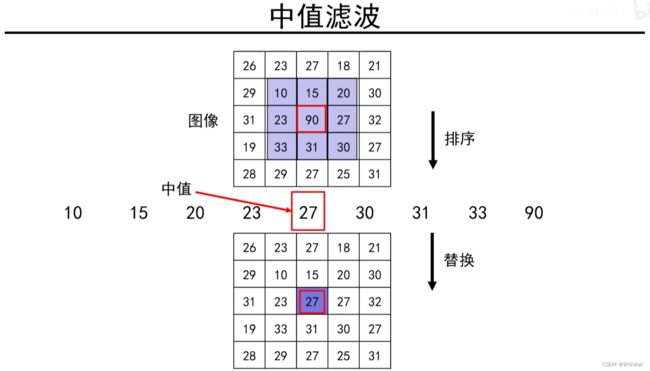
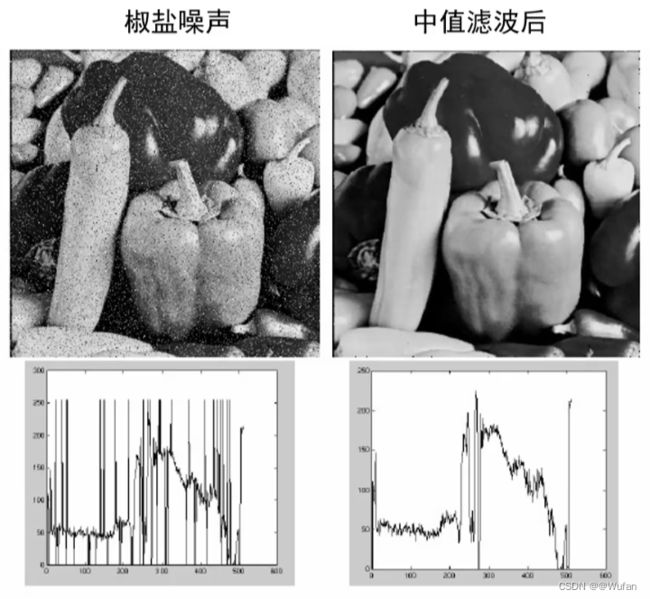
1)椒盐噪声:黑色像素和白色像素随机出现,建议使用中值滤波。
2)脉冲噪声:白色像素随机出现,建议使用中值滤波。
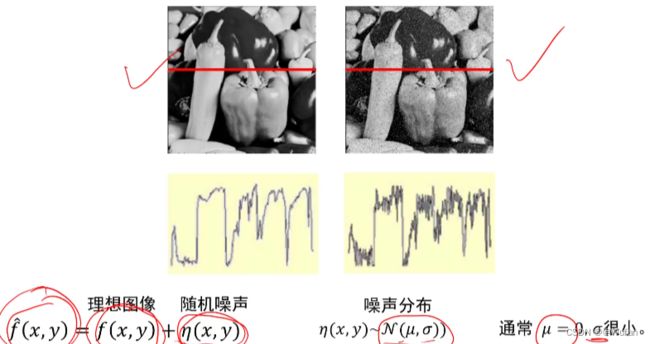
3)高斯噪声:噪声强度变化服从高斯分布(正态分布),建议使用高斯卷积核去噪。
3.1.1 椒盐噪声
3.1.2 高斯噪声
4 卷积与边缘提取
4.1 什么是边缘
图像中亮度明显而急剧变化的点
4.2 为什么要研究边缘
1)编码图像中的语义与形状信息
2)相对于像素表示,边缘表示显然更加紧凑
4.3 边缘的种类

4.4 边缘检测
图像中亮度明显而急剧变化的地方
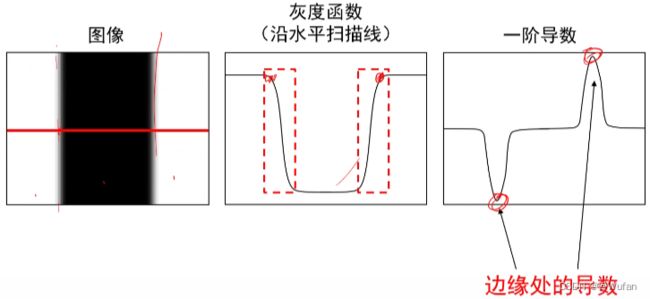
4.5 图像求导
2D函数f(x,y)的偏导为:
∂ f ( x , y ) ∂ x \frac{\partial f(x,y)}{\partial x} ∂x∂f(x,y) = lim x → ε \lim_{x\to\varepsilon} limx→ε f ( x + ε , y ) − f ( x , y ) ε \frac{f(x+\varepsilon,y)-f(x,y)}{\varepsilon} εf(x+ε,y)−f(x,y)
图像求导公式:
∂ f ( x , y ) ∂ x \frac{\partial f(x,y)}{\partial x} ∂x∂f(x,y) ≈ f ( x + 1 , y ) − f ( x , y ) 1 \frac{f(x+1,y)-f(x,y)}{1} 1f(x+1,y)−f(x,y)

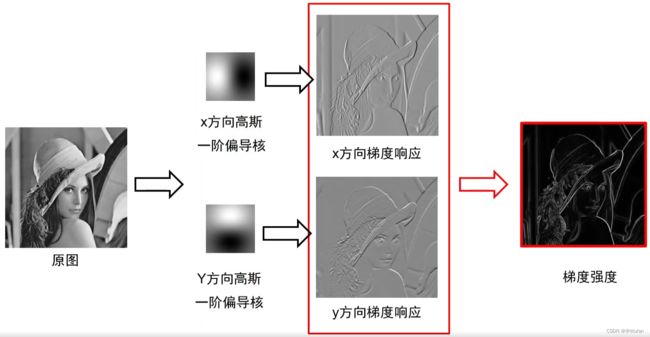
4.6 图像梯度
1)图像梯度: ▽ f \bigtriangledown f ▽f = [ ∂ f ∂ x \frac{\partial f}{\partial x} ∂x∂f , ∂ f ∂ y \frac{\partial f}{\partial y} ∂y∂f ] 梯度指向灰度变化最快的方向

2)梯度方向: θ \theta θ = t a n − 1 tan^{-1} tan−1 ( ∂ f ∂ y / ∂ f ∂ x ) (\frac{\partial f}{\partial y} / \frac{\partial f}{\partial x}) (∂y∂f/∂x∂f)
3)梯度的模:|| ▽ f \bigtriangledown f ▽f|| = ( ∂ f ∂ x ) 2 + ( ∂ f ∂ y ) 2 \sqrt{(\frac{\partial f}{\partial x})^2 + (\frac{\partial f}{\partial y})^2} (∂x∂f)2+(∂y∂f)2

4.7 噪声的影响
1)噪声带来的边缘检测问题
噪声图像的某一行或列的灰度值随位置变换的情况
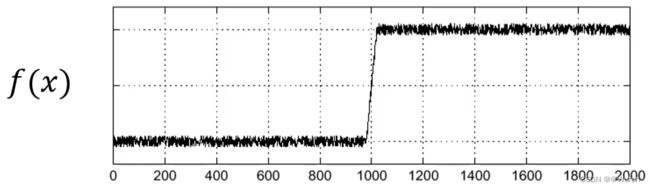
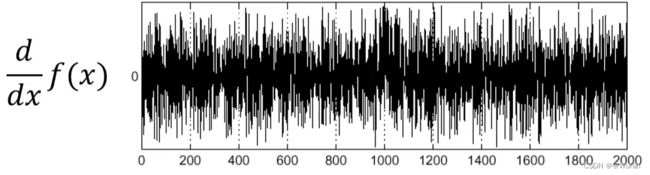
边缘在什么位置?
2)解决方法:先平滑再求导

3)解决方法:先求导再卷积(节省了一次图像卷积操作)
微分是卷积,而卷积具有结合性
d d x ( f ∗ g ) \frac{d}{dx}(f * g) dxd(f∗g) = f * d d x g \frac{d}{dx}g dxdg
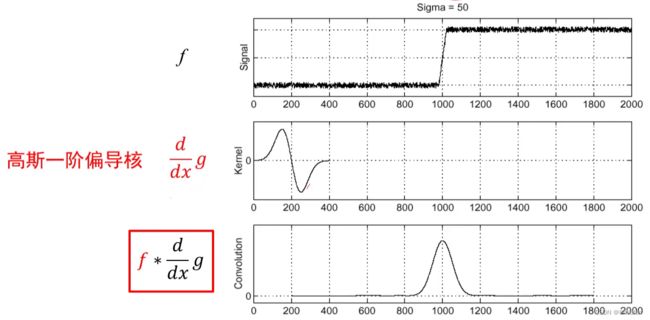
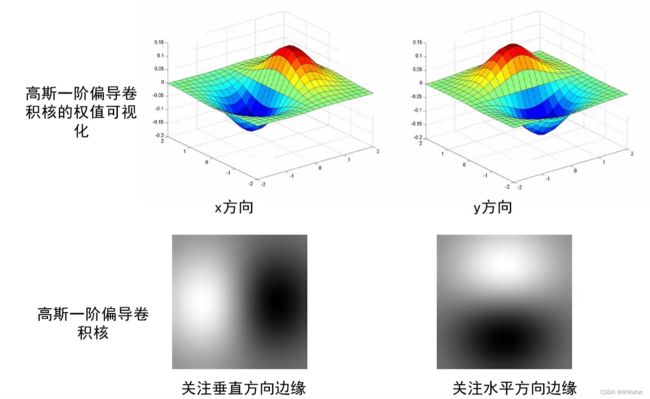
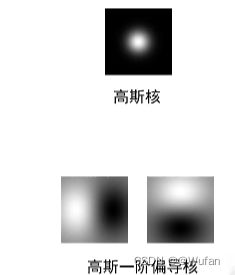
4)高斯一阶偏导卷积核
5)高斯一阶偏导卷积核的方差变化
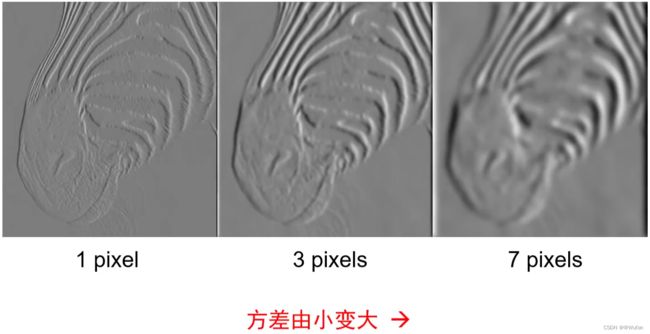
σ \sigma σ越大,提取的轮廓越粗犷
σ \sigma σ越小,提取的轮廓越细致
4.8 高斯核 vs. 高斯一阶偏导核
- 高斯核
- 消除高频成分(低通滤波器)
- 卷积核中的权值不可为负数
- 权值总和为1(恒定区域不受卷积影响)
- 高斯一阶偏导核
- 高斯的导数
- 卷积核中的权值可以为负
- 权值总和是0(恒定区域无响应)
- 高对比度点的响应值大
4.9 边缘检测目标
1)检测目标

2)Canny边缘检测器
① 非极大值抑制

改进:

if( p 点的梯度强度 > q 点的梯度强度 && p 点的梯度强度 > r 点的梯度强度):
p 点保留
else:
删除 p 点
② 门限过滤
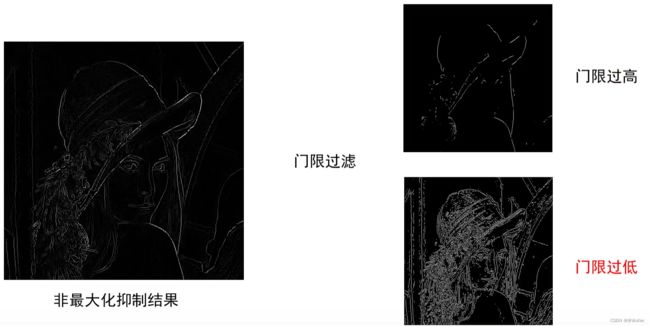
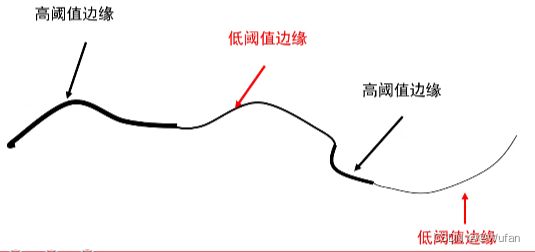
改进:双阈值
③ 总结
- 用高斯一阶偏导核卷积图像
- 计算每个点的梯度幅值和方向
- 非极大值抑制
- 将宽的“边缘”细化至单个像素宽度
- 连接与阈值(滞后)
- 定义两个阈值:低和高
- 使用高阈值开始边缘曲线,使用低阈值继续边缘曲线