基于can总线的A2L文件解析(2)
文章目录
- 前言
- Version
-
- ASAP2_Version
- A2ML_Version
- Project
-
- HEADER
-
- VERSION
- PROJECT_NO
- Module
-
- A2ML
-
- Protocol_Layer
- DAQ
- DAQ_LIST
- EVENT
- PAG
- CAN_Parameters
- 总结
前言
在上一篇关于A2L的文章中,主要介绍了数据区(标定量,观测量等)的格式和数据,知道了变量在ECU中的地址,在程序运行过程中,通过XCP协议读写对应地址,即可实现标定和测量过的过程。
本文将继续介绍A2L中的协议区,详细介绍基于CAN的XCP协议是如何在A2L中表现的。
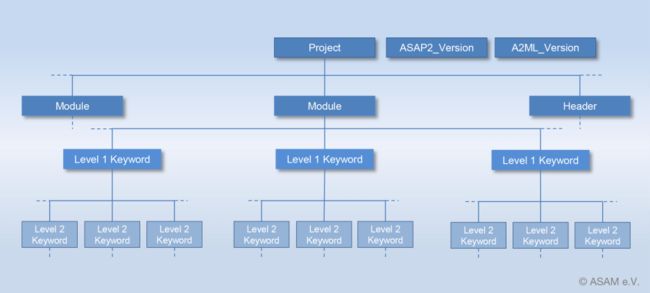
按A2L文件结构,分Version,Project,Module,及Module下的Keyword.
Version
Version包括两个版本,一个ASAP2版本,一个A2ML版本。
ASAP2_Version
该版本号有两个uint数,表示为VersionNo和UpgradeNo,其中’ VersionNo ‘表示主版本号,’ UpgradeNo '表示升级号(版本号的小数部分)。如果ASAM MCD-2MC标准实现了额外的功能,但对现有应用程序没有影响(兼容修改),则UpgradeNo将增加。如果不兼容的修改,VersionNo将增加。
示例:
ASAP2_VERSION 1 60 /* Version 1.60 */
A2ML_Version
该版本号和ASAP2版本号格式相同。A2ML版本是可选的,如果省略了该关键字,或者版本号低于1.31,则使用旧的BLOB格式。当A2ML版本号为1.31时,必须生成新的格式。
Project
一个A2L文件中必须包含一个Project.包含了项目信息。一般一个A2L中也就包含一个项目。
/begin PROJECT MyProject
"This is my Project"
/begin HEADER "This is Header"
VERSION "BG5.0815"
PROJECT_NO M4711Z1
/end HEADER
...
/end PROJECT
/begin
Project必须包含的参数有名称和描述。HEADER是可选的。一个Project还必须至少包含一个Module,一个Module即表示一个ECU。
HEADER
HEADER包含Comment(描述信息),VERSION(版本)和PROJECT_NO(项目号)是可选的。
VERSION
项目版本,如"BG5.0815",最多MAX_STRING个字符。
PROJECT_NO
项目号,如M4711Z1,最多MAX_IDENT个字符
Module
MODULE关键字描述一个完整的ECU或设备,包括所有可标定和测量的对象、转换方法和功能。为此,需要增加ECU接口相关参数的格式说明。
在第一节中介绍的内容都属于该关键字中。
注意:在同一个模块中可以有相同名称的测量对象和计算方法。在同一个模块中,不能有相同名称的测量对象和标定对象。
Module首先包含名称和描述,如:
/begin MODULE MyModule "This is my Module"
...
/end MODULE
A2ML
该关键字是接口相关参数的格式说明,是Module的第一个且非常重要的关键字。
Protocol_Layer
该协议接口在ASAP-XCP-Part2中可以找到
/*********************** start of PROTOCOL_LAYER ****************************/
struct Protocol_Layer { /* At MODULE */
uint; /* XCP protocol layer version */
/* e.g. "1.0" = 0x0100 */
uint; /* T1 [ms] */
uint; /* T2 [ms] */
uint; /* T3 [ms] */
uint; /* T4 [ms] */
uint; /* T5 [ms] */
uint; /* T6 [ms] */
uint; /* T7 [ms] */
uchar; /* MAX_CTO */
uint; /* MAX_DTO */
enum { /* BYTE_ORDER */
"BYTE_ORDER_MSB_LAST" = 0,
"BYTE_ORDER_MSB_FIRST" = 1
}; /* BYTE_ORDER: BYTE_ORDER_MSB_LAST = Intel, BYTE_ORDER_MSB_FIRST = Motorola*/
enum {
"ADDRESS_GRANULARITY_BYTE" = 1,
"ADDRESS_GRANULARITY_WORD" = 2,
"ADDRESS_GRANULARITY_DWORD" = 4
}; /*The address granularity indicates the size of an element contained at a single address.*/
T1:此参数指定用于Xcp主机进行一般响应超时处理的超时值,如CONNECT
T2:此参数指定Xcp主机用于生成校验和响应超时处理的超时值
T3:此参数指定用于Xcp主机编程准备响应超时处理的超时值,如PROGRAM_START, PROGRAM_VERIFY, PROGRAM_PREPARE
T4:此参数指定Xcp主机用于程序清除响应超时处理的超时值,PROGRAM_CLEAR
T5:此参数指定Xcp主机用于编程的响应超时处理的超时值,PROGRAM, PROGRAM_RESET, PROGRAM_MAX
T6:此参数指定Xcp主机用于用户定义的连接响应超时处理的超时值
T7:此参数指定用于等待Xcp主机发出多个命令的预操作的超时值
MAX_CTO:Maximum size of Command Transfer Objects (e.g. for polling)CTO的最大数量
MAX_DTO:Maximum size of Data Transfer Objects (e.g. for DAQ)DTO的最大数量
BYTE_ORDER:字节顺序,BYTE_ORDER_MSB_LAST(高位在后,Inter格式),BYTE_ORDER_MSB_FIRST(高位在前,Motorola格式)
由于CAN data中定义的数据位没有跨字节的,其实Intel和Motorola没有区别
address granularity:表示单个地址中包含的元素的大小
taggedstruct { /* optional */
("OPTIONAL_CMD" enum { /* XCP-Code of optional command */
/* supported by the slave */
"GET_COMM_MODE_INFO" = 0xFB,
"GET_ID" = 0xFA,
"SET_REQUEST" = 0xF9,
"GET_SEED" = 0xF8,
"UNLOCK" = 0xF7,
"SET_MTA" = 0xF6,
"UPLOAD" = 0xF5,
"SHORT_UPLOAD" = 0xF4,
"BUILD_CHECKSUM" = 0xF3,
"TRANSPORT_LAYER_CMD" = 0xF2,
"USER_CMD" = 0xF1,
"DOWNLOAD" = 0xF0,
"DOWNLOAD_NEXT" = 0xEF,
"DOWNLOAD_MAX" = 0xEE,
"SHORT_DOWNLOAD" = 0xED,
"MODIFY_BITS" = 0xEC,
"SET_CAL_PAGE" = 0xEB,
"GET_CAL_PAGE" = 0xEA,
"GET_PAG_PROCESSOR_INFO" = 0xE9,
"GET_SEGMENT_INFO" = 0xE8,
"GET_PAGE_INFO" = 0xE7,
"SET_SEGMENT_MODE" = 0xE6,
"GET_SEGMENT_MODE" = 0xE5,
"COPY_CAL_PAGE" = 0xE4,
"CLEAR_DAQ_LIST" = 0xE3,
"SET_DAQ_PTR" = 0xE2,
"WRITE_DAQ" = 0xE1,
"SET_DAQ_LIST_MODE" = 0xE0,
"GET_DAQ_LIST_MODE" = 0xDF,
"START_STOP_DAQ_LIST" = 0xDE,
"START_STOP_SYNCH" = 0xDD,
"GET_DAQ_CLOCK" = 0xDC,
"READ_DAQ" = 0xDB,
"GET_DAQ_PROCESSOR_INFO" = 0xDA,
"GET_DAQ_RESOLUTION_INFO" = 0xD9,
"GET_DAQ_LIST_INFO" = 0xD8,
"GET_DAQ_EVENT_INFO" = 0xD7,
"FREE_DAQ" = 0xD6,
"ALLOC_DAQ" = 0xD5,
"ALLOC_ODT" = 0xD4,
"ALLOC_ODT_ENTRY" = 0xD3,
"PROGRAM_START" = 0xD2,
"PROGRAM_CLEAR" = 0xD1,
"PROGRAM" = 0xD0,
"PROGRAM_RESET" = 0xCF,
"GET_PGM_PROCESSOR_INFO" = 0xCE,
"GET_SECTOR_INFO" = 0xCD,
"PROGRAM_PREPARE" = 0xCC,
"PROGRAM_FORMAT" = 0xCB,
"PROGRAM_NEXT" = 0xCA,
"PROGRAM_MAX" = 0xC9,
"PROGRAM_VERIFY" = 0xC8,
"WRITE_DAQ_MULTIPLE" = 0xC7
})*;
上面是命令的定义。实际使用需要看配置
“COMMUNICATION_MODE_SUPPORTED” taggedunion { /* optional modes supported */
“ BLOCK” taggedstruct {
"SLAVE"; /* Slave Block Mode supported */
"MASTER" struct { /* Master Block Mode supported */
uchar; /* MAX_BS */
uchar; /* MIN_ST */
};
};
"INTERLEAVED" uchar; /* QUEUE_SIZE */
};
"SEED_AND_KEY_EXTERNAL_FUNCTION" char[256]; /* Name of the Seed&Key function */
/* including file extension */
/* without path */
"MAX_DTO_STIM" uint; /* overrules MAX_DTO see above for STIM use case */
};
};
}; /********************* end of PROTOCOL_LAYER *****************************/
MAX_BS:表示允许的最大块大小,即块序列中连续命令包的数量
MIN_ST:表示从主设备到从设备的块传输数据包之间所需的最小间隔时间,单位为100毫秒
QUEUE_SIZE:表示主机可以发送到从机接收队列的最大连续命令数据包数
SEED_AND_KEY_EXTERNAL_FUNCTION:Seed&Key函数名
MAX_DTO_STIM:覆盖STIM中的MAX_DTO
DAQ
该接口在ASAP-XCP-Part2中可以找到
/***************************** start of DAQ *********************************/
struct Daq { /* DAQ supported, at MODULE*/
enum { /* DAQ_CONFIG_TYPE */
"STATIC" = 0,
"DYNAMIC" = 1
};
uint; /* MAX_DAQ */
uint; /* MAX_EVENT_CHANNEL */
uchar; /* MIN_DAQ */
enum { /* OPTIMISATION_TYPE */
"OPTIMISATION_TYPE_DEFAULT" = 0,
"OPTIMISATION_TYPE_ODT_TYPE_16" = 1,
"OPTIMISATION_TYPE_ODT_TYPE_32" = 2,
"OPTIMISATION_TYPE_ODT_TYPE_64" = 3,
"OPTIMISATION_TYPE_ODT_TYPE_ALIGNMENT" = 4,
"OPTIMISATION_TYPE_MAX_ENTRY_SIZE" = 5
};
enum { /* ADDRESS_EXTENSION */
"ADDRESS_EXTENSION_FREE" = 0,
"ADDRESS_EXTENSION_ODT" = 1,
"ADDRESS_EXTENSION_DAQ" = 3
};
DAQ_CONFIG_TYPE:DAQ类型,静态0或动态1
MAX_DAQ:可用DAQ列表的总数
MAX_EVENT_CHANNEL:可用事件通道总数
MIN_DAQ:预定义DAQ列表的总数
OPTIMISATION_TYPE:指出主机最好使用的优化方法类型
ADDRESS_EXTENSIO:该标志指示一个ODT内或一个DAQ内所有条目的地址扩展必须相同
enum { /* IDENTIFICATION_FIELD */
"IDENTIFICATION_FIELD_TYPE_ABSOLUTE" = 0,
"IDENTIFICATION_FIELD_TYPE_RELATIVE_BYTE" = 1,
"IDENTIFICATION_FIELD_TYPE_RELATIVE_WORD" = 2,
"IDENTIFICATION_FIELD_TYPE_RELATIVE_WORD_ALIGNED" = 3
};
enum { /* GRANULARITY_ODT_ENTRY_SIZE_DAQ */
"GRANULARITY_ODT_ENTRY_SIZE_DAQ_BYTE" = 1,
"GRANULARITY_ODT_ENTRY_SIZE_DAQ_WORD" = 2,
"GRANULARITY_ODT_ENTRY_SIZE_DAQ_DWORD" = 4,
"GRANULARITY_ODT_ENTRY_SIZE_DAQ_DLONG" = 8
};
uchar; /* MAX_ODT_ENTRY_SIZE_DAQ */
enum { /* OVERLOAD_INDICATION */
"NO_OVERLOAD_INDICATION" = 0,
"OVERLOAD_INDICATION_PID" = 1,
"OVERLOAD_INDICATION_EVENT" = 2
};
IDENTIFICATION_FIELD:将DAQ数据包传输到主机时,从机将使用的标识字段类型
GRANULARITY_ODT_ENTRY_SIZE_DAQ :指示由DAQ的DaqListType的ODT条目描述的元素的大小
MAX_ODT_ENTRY_SIZE_DAQ:Maximum size of ODT entry for DAQ
OVERLOAD_INDICATION:OVERLOAD_INDICATION_PID:这意味着当过载发生时,PID中设置最高位 OVERLOAD_INDICATION_EVENT:这意味着当发生过载时,将设置一个事件
taggedstruct { /* optional */
"DAQ_ALTERNATING_SUPPORTED" uint; /* Display_Event_Channel_Number */
"PRESCALER_SUPPORTED";
"RESUME_SUPPORTED";
"STORE_DAQ_SUPPORTED";
block "STIM" struct { /* STIM supported */
enum { /* GRANULARITY_ODT_ENTRY_SIZE_STIM */
"GRANULARITY_ODT_ENTRY_SIZE_STIM_BYTE" = 1,
"GRANULARITY_ODT_ENTRY_SIZE_STIM_WORD" = 2,
"GRANULARITY_ODT_ENTRY_SIZE_STIM_DWORD" = 4,
"GRANULARITY_ODT_ENTRY_SIZE_STIM_DLONG" = 8
};
uchar; /* MAX_ODT_ENTRY_SIZE_STIM */
taggedstruct { /* bitwise stimulation */
"BIT_STIM_SUPPORTED";
“MIN_ST_STIM” uchar; /* separation time between DTOs */
/* time in units of 100 microseconds */
};
};
block表示是子关键字,定义时会生成 /begin STIM
DAQ_ALTERNATING_SUPPORTED:该标志选择交替显示模式
PRESCALER_SUPPORTED:该标志表示所有DAQ列表都支持预分频器以缩短传输周期
RESUME_SUPPORTED:此标志表示可以将所有DAQ列表置于RESUME模式。
STORE_DAQ_SUPPORTED:该标志表示从设备可以存储DAQ配置
GRANULARITY_ODT_ENTRY_SIZE_STIM:指示由stim的DaqListType的ODT条目描述的元素的大小
MAX_ODT_ENTRY_SIZE_STIM:Maximum size of ODT entry for STIM
BIT_STIM_SUPPORTED:该标志指示是否支持通过WRITE_DAQ 中的BIT_OFFSET进行逐位数据仿真
MIN_ST_STIM:STIM DTO时间之间的间隔时间,单位为100微秒
block "TIMESTAMP_SUPPORTED" struct {
uint; /* TIMESTAMP_TICKS */
enum { /* TIMESTAMP_SIZE */
"NO_TIME_STAMP" = 0,
"SIZE_BYTE" = 1,
"SIZE_WORD" = 2,
"SIZE_DWORD" = 4
};
enum { /* RESOLUTION OF TIMESTAMP */
"UNIT_1NS" = 0,
"UNIT_10NS" = 1,
"UNIT_100NS" = 2,
"UNIT_1US" = 3,
"UNIT_10US" = 4,
"UNIT_100US" = 5,
"UNIT_1MS" = 6,
"UNIT_10MS" = 7,
"UNIT_100MS" = 8,
"UNIT_1S" = 9,
“UNIT_1PS” = 10,
“UNIT_10PS” = 11,
“UNIT_100PS” = 12
};
taggedstruct {
"TIMESTAMP_FIXED";
};
};
"PID_OFF_SUPPORTED";
TIMESTAMP_TICKS:timestamp将按每个单位的TIMESTAMP_TICKS刻度递增
TIMESTAMP_SIZE:XCP消息中用于timestamp字段的字节数。如果是No_TIME_STAMP,则timestamp字段不可用
RESOLUTION OF TIMESTAMP:每个TICKS的时间
TIMESTAMP_FIXED:如果启用,从设备始终以timestamp模式发送数据传输对象(DTO)数据包。否则,将为每个DAQ列表分别动态启用timestamp。
PID_OFF_SUPPORTED:DAQ_PROPERTIES中的标志表示可以在没有标识字段的情况下传输DTO数据包
DAQ_LIST
一般都用动态list。所以list配置基本用不到
/************************ start of DAQ_LIST *************************/
(block "DAQ_LIST" struct { /* DAQ_LIST */
/* multiple possible */
uint; /* DAQ_LIST_NUMBER */
taggedstruct { /* optional */
"DAQ_LIST_TYPE" enum {
"DAQ" = 1, /* DIRECTION = DAQ only */
"STIM" = 2, /* DIRECTION = STIM only */
"DAQ_STIM" = 3 /* both directions possible */
/* but not simultaneously */
};
"MAX_ODT" uchar; /* MAX_ODT */
"MAX_ODT_ENTRIES" uchar; /* MAX_ODT_ENTRIES */
"FIRST_PID" uchar; /* FIRST_PID for this DAQ_LIST */
"EVENT_FIXED" uint; /* this DAQ_LIST always */
/* in this event */
block "PREDEFINED" taggedstruct { /* predefined */
/* not configurable DAQ_LIST */
(block “ODT” struct {
uchar; /* ODT number */
taggedstruct {
(“ODT_ENTRY” struct {
uchar; /* ODT_ENTRY number */
ulong; /* address of element */
uchar; /* address extension of element */
uchar; /* size of element [AG] */
uchar; /* BIT_OFFSET */
})*;
}; /* end of ODT_ENTRY */
})*; /* end of ODT */
}; /* end of PREDEFINED */
};
})*;/********************* end of DAQ_LIST ***************************/
EVENT
/************************* start of EVENT ****************************/
(block "EVENT" struct { /* EVENT */
/* multiple possible */
char[101]; /* EVENT_CHANNEL_NAME 事件长名*/
char[9]; /* EVENT_CHANNEL_SHORT_NAME 事件短名*/
uint; /* EVENT_CHANNEL_NUMBER 事件通道*/
enum {
"DAQ" = 1, /* only DAQ_LISTs */
/* with DIRECTION = DAQ */
"STIM" = 2, /* only DAQ_LISTs */
/* with DIRECTION = STIM */
"DAQ_STIM" = 3 /* both kind of DAQ_LISTs
数据传输类型 DAQ是从ECU到上位机,STIM是从上位机到ECU */
};
uchar; /* MAX_DAQ_LIST 最大DAQ LIST数量*/
uchar; /* EVENT_CHANNEL_TIME_CYCLE 事件循环周期*/
uchar; /* EVENT_CHANNEL_TIME_UNIT 事件时间单位*/
uchar; /* EVENT_CHANNEL_PRIORITY 事件优先级*/
taggedstruct { /* optional */
“COMPLEMENTARY_BYPASS_EVENT_CHANNEL_NUMBER” uint;
//该关键字用于组合两个事件通道,构建BYPASS
“CONSISTENCY” enum {
“DAQ” = 0,
“EVENT” = 1
}; //通过该关键字,从机可以指示在该事件中处理数据时存在何种数据一致性
};
})*;/******************** end of EVENT ********************************/
}; /*end of optional at DAQ */
}; /************************* end of DAQ *************************************/
PAG
/**************************** start of PAG ***********************************/
struct Pag { /* PAG supported, at MODULE */
uchar; /* MAX_SEGMENTS */
taggedstruct { /* optional */
"FREEZE_SUPPORTED";
};
}; /************************* end of PAG *************************************/
MAX_SEGMENTS: 从机中的段总数
FREEZE_SUPPORTED:该标志表示所有段都可以冻结
CAN_Parameters
CAN_Parameters是CAN xpc的参数设置,包括ID。波特率等
struct CAN_Parameters { /* At MODULE */
uint; /* XCP on CAN version 版本号*/
/* e.g. "1.0" = 0x0100 */
taggedstruct { /* optional */
“CAN_ID_BROADCAST” ulong; /* Auto detection CAN-ID 自动检测CAN ID*/
/* master -> slaves 主机->从机*/
/* Bit31= 1: extended identifier */
“CAN_ID_MASTER” ulong; /* CMD/STIM CAN-ID 主机CAN ID*/
/* master -> slave */
/* Bit31= 1: extended identifier */
"CAN_ID_MASTER_INCREMENTAL"; /* master uses range of CAN-IDs 主机使用范围内的CAN ID*/
/* start of range = CAN_ID_MASTER */
/* end of range = CAN_ID_MASTER+MAX_BS(_PGM)-1 */
“CAN_ID_SLAVE” ulong; /* RES/ERR/EV/SERV/DAQ CAN-ID 从机CAN ID*/
/* slave -> master */
/* Bit31= 1: extended identifier */
“BAUDRATE” ulong; /* BAUDRATE [Hz] 总线波特率*/
"SAMPLE_POINT" uchar; /* sample point 采样点*/
/* [% complete bit time] */
“SAMPLE_RATE” enum {
"SINGLE" = 1, /* 1 sample per bit 采样率*/
"TRIPLE" = 3 /* 3 samples per bit */
};
"BTL_CYCLES" uchar; /* BTL_CYCLES 每个bit的slot数*/
/* [slots per bit time] */
"SJW" uchar; /* length synchr. segment 同步段长度*/
/* [BTL_CYCLES] */
"SYNC_EDGE" enum {
"SINGLE" = 1, /* on falling edge only 下降沿同步*/
"DUAL" = 2 /* on falling and rising edge 下降沿和上升沿同步*/
};
“MAX_DLC_REQUIRED”; /* master to slave frames 主从机的DLC始终为8*/
/* always to have DLC = MAX_DLC = 8 */
//以下用的不多
(block “DAQ_LIST_CAN_ID” struct { /* At IF_DATA DAQ */
uint; /* reference to DAQ_LIST_NUMBER */
taggedstruct { /* exclusive tags */
/* either VARIABLE or FIXED */
"VARIABLE";
"FIXED" ulong; /* this DAQ_LIST always */
/* on this CAN_ID */
};
})*;
};
};/************************* end of CAN ***********************************/
总结
以上,常用的接口就介绍完了,还有一些不常用的没有列出来。可以参考ASAM XCP。后面介绍实际的数据定义。主要跟配置相关。
若你觉得本文对你有帮助,欢迎点赞,关注,收藏,转发~~~
你的鼓励是对小弟的最大支持~~~
建了一个WX公众号,《汽车电子学习笔记》感兴趣可以关注一下~~~文章都会同步更新~