深度学习入门:基于Python的理论与实现③
第六章 与学习相关的技巧
本章将介绍神经网络的学习中的一些重要观点,主题涉及寻找最优权重参数的最优化方法、权重参数的初始值、超参数的设定方法等。此外,为了应对过拟合,本章还将介绍权值衰减、Dropout等正则化方法,并进行实现。最后将对近年来众多研究中使用的Batch Normalization方法进行简单的介绍。
1.参数的更新
神经网络的学习的目的是找到使损失函数的值尽可能小的参数。这是寻找最优参数的问题,解决这个问题的过程称为最优化(optimization)。
在前几章中,为了找到最优参数,我们将参数的梯度(导数)作为了线索。使用参数的梯度,沿梯度方向更新参数,并重复这个步骤多次,从而逐渐靠近最优参数,这个过程称为随机梯度下降法(stochastic gradient descent),简称SGD。
class SGD:
def __init__(self, lr = 0.01):
self.lr = lr
def update(self, params, grads):
for key in params.keys():
params[key] -= self.lr * grads[key]
SGD的缺点是,如果函数的形状非均向(anisotropic),比如呈延伸状,搜索的路径就会非常低效。
1.1 Momentum
Momentum是动量的意思,用数学式表示Momentum:

和前面的SGD一样,W表示要更新的权重参数, 表示损失函数关于W的梯度,η表示学习率。这里新出现了一个变量v,对应物理上的速度。
上式中有αv这一项。在物体不受任何力时,该项承担使物体逐渐减速的任务(α设定为0.9之类的值),对应物理上的地面摩擦或空气阻力。
class Momentum:
"""Momentum SGD"""
def __init__(self, lr=0.01, momentum=0.9):
self.lr = lr
self.momentum = momentum
self.v = None
def update(self, params, grads):
if self.v is None:
self.v = {}
for key, val in params.items():
self.v[key] = np.zeros_like(val)
#构造矩阵self.v[key],其维度与val相同,并为其初始化为0
#方便地构造了新矩阵且无需参数指定shape大小
for key in params.keys():
self.v[key] = self.momentum*self.v[key] - self.lr*grads[key]
params[key] += self.v[key]
1.2 AdaGrad
在神经网络的学习中,学习率(数学式中记为η)的值很重要。学习率过小,会导致学习花费过多时间;反过来,学习率过大,则会导致学习发散而不能正确进行。
在关于学习率的有效技巧中,有一种被称为学习率衰减(learning rate decay)的方法,即随着学习的进行,使学习率逐渐减小。
用数学式表示AdaGrad的更新方法:
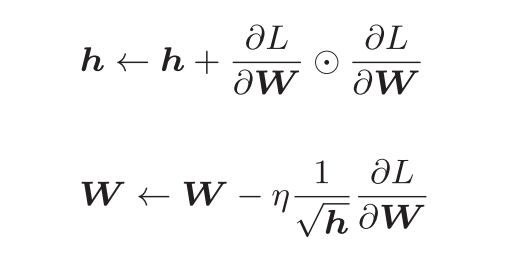
这里新出现了变量h,如图所示,它保存了以前的所有梯度值的平方和(式(6.5)中的表示对应矩阵元素的乘法)。这样在更新参数时就可以调整学习的尺度。这意味着,参数的元素中变动较大(被大幅更新)的元素的学习率将变小。也就是说,可以按参数的元素进行学习率衰减,使变动大的参数的学习率逐渐减小。
class AdaGrad:
"""AdaGrad"""
def __init__(self, lr=0.01):
self.lr = lr
self.h = None
def update(self, params, grads):
if self.h is None:
self.h = {}
for key, val in params.items():
self.h[key] = np.zeros_like(val)
for key in params.keys():
self.h[key] += grads[key] * grads[key]
params[key] -= self.lr * grads[key] / (np.sqrt(self.h[key]) + 1e-7)
#加上微小值1e-7,防止self.h[key]中有0时,用0作除数的情况
1.3 Adam
结合上述Momentum和AdaGrad的方法,实现参数空间的高效搜索
class Adam:
"""Adam (http://arxiv.org/abs/1412.6980v8)"""
#beta1为0.9,beta2为0.999,设定了这些值后,大多数情况均可运行
def __init__(self, lr=0.001, beta1=0.9, beta2=0.999):
self.lr = lr
self.beta1 = beta1
self.beta2 = beta2
self.iter = 0
self.m = None
self.v = None
def update(self, params, grads):
if self.m is None:
self.m, self.v = {}, {}
for key, val in params.items():
self.m[key] = np.zeros_like(val)
self.v[key] = np.zeros_like(val)
self.iter += 1
lr_t = self.lr * np.sqrt(1.0 - self.beta2**self.iter) / (1.0 - self.beta1**self.iter)
for key in params.keys():
#self.m[key] = self.beta1*self.m[key] + (1-self.beta1)*grads[key]
#self.v[key] = self.beta2*self.v[key] + (1-self.beta2)*(grads[key]**2)
self.m[key] += (1 - self.beta1) * (grads[key] - self.m[key])
self.v[key] += (1 - self.beta2) * (grads[key]**2 - self.v[key])
params[key] -= lr_t * self.m[key] / (np.sqrt(self.v[key]) + 1e-7)
#unbias_m += (1 - self.beta1) * (grads[key] - self.m[key]) # correct bias
#unbisa_b += (1 - self.beta2) * (grads[key]*grads[key] - self.v[key]) # correct bias
#params[key] += self.lr * unbias_m / (np.sqrt(unbisa_b) + 1e-7)
1.4 基于MNIST数据集的更新方法的比较
# coding: utf-8
import os
import sys
sys.path.append(os.pardir) # 为了导入父目录的文件而进行的设定
import matplotlib.pyplot as plt
from dataset.mnist import load_mnist
from common.util import smooth_curve #使损失函数的图形变圆滑
from common.multi_layer_net import MultiLayerNet
from common.optimizer import *
# 0:读入MNIST数据==========
(x_train, t_train), (x_test, t_test) = load_mnist(normalize=True)
train_size = x_train.shape[0]
batch_size = 128
max_iterations = 2000 # 迭代次数
# 1:进行实验的设置==========
optimizers = {} #优化
optimizers['SGD'] = SGD()
optimizers['Momentum'] = Momentum()
optimizers['AdaGrad'] = AdaGrad()
optimizers['Adam'] = Adam()
#optimizers['RMSprop'] = RMSprop()
networks = {}
train_loss = {}
for key in optimizers.keys():
networks[key] = MultiLayerNet(
input_size=784, hidden_size_list=[100, 100, 100, 100],
output_size=10)
train_loss[key] = []
# 2:开始训练==========
for i in range(max_iterations):
batch_mask = np.random.choice(train_size, batch_size)
x_batch = x_train[batch_mask]
t_batch = t_train[batch_mask]
for key in optimizers.keys():
grads = networks[key].gradient(x_batch, t_batch)
optimizers[key].update(networks[key].params, grads)
loss = networks[key].loss(x_batch, t_batch)
train_loss[key].append(loss)
if i % 100 == 0: #防止过拟合
print( "===========" + "iteration:" + str(i) + "===========")
for key in optimizers.keys():
loss = networks[key].loss(x_batch, t_batch)
print(key + ":" + str(loss))
# 3.绘制图形==========
markers = {"SGD": "o", "Momentum": "x", "AdaGrad": "s", "Adam": "D"}
x = np.arange(max_iterations)
for key in optimizers.keys():
plt.plot(x, smooth_curve(train_loss[key]), marker=markers[key], markevery=100, label=key)
plt.xlabel("iterations")
plt.ylabel("loss")
plt.ylim(0, 1)
plt.legend()
plt.show()

2.权重的初始值
权值衰减就是一种以减小权重参数的值为目的进行学习的方法。通过减小权重参数的值来抑制过拟合的发生。应该将初始值设为较小的值,不可设为0。
2.1 隐藏层的激活值的分布
激活函数的输出数据称为“激活值”。
观察激活值的分布:
# coding: utf-8
import numpy as np
import matplotlib.pyplot as plt
# 激活函数
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def ReLU(x):
return np.maximum(0, x)
def tanh(x):
return np.tanh(x)
input_data = np.random.randn(1000, 100) # 1000个数据
node_num = 100 # 各隐藏层的节点(神经元)数
hidden_layer_size = 5 # 隐藏层有5层
activations = {} # 激活值的结果保存在这里
x = input_data
for i in range(hidden_layer_size):
if i != 0:
x = activations[i-1]
# 改变初始值进行实验!
w = np.random.randn(node_num, node_num) * 1
# w = np.random.randn(node_num, node_num) * 0.01
# w = np.random.randn(node_num, node_num) * np.sqrt(1.0 / node_num)
# w = np.random.randn(node_num, node_num) * np.sqrt(2.0 / node_num)
a = np.dot(x, w)
# 将激活函数的种类也改变,来进行实验!
z = sigmoid(a)
# z = ReLU(a)
# z = tanh(a)
activations[i] = z
# 绘制直方图
for i, a in activations.items():
plt.subplot(1, len(activations), i+1)
plt.title(str(i+1) + "-layer")
if i != 0: plt.yticks([], [])
# plt.xlim(0.1, 1)
# plt.ylim(0, 7000)
plt.hist(a.flatten(), 30, range=(0,1))
plt.show()
这里假设神经网络有5层,每层有100个神经元。然后,用高斯分布随机生成1000个数据作为输入数据,并把它们传给5层神经网络。虽然这次我们使用的是标准差为1的高斯分布,但实验的目的是通过改变这个尺度(标准差),观察激活值的分布如何变化。

各层的激活值呈偏向0和1的分布,偏向0和1的数据分布会造成反向传播中梯度的值不断变小,最后消失。这个问题称为梯度消失。
# w = np.random.randn(node_num, node_num) * 1
w = np.random.randn(node_num, node_num) * 0.01
使用标准差为0.01的高斯分布时,各层的激活值的分布如下
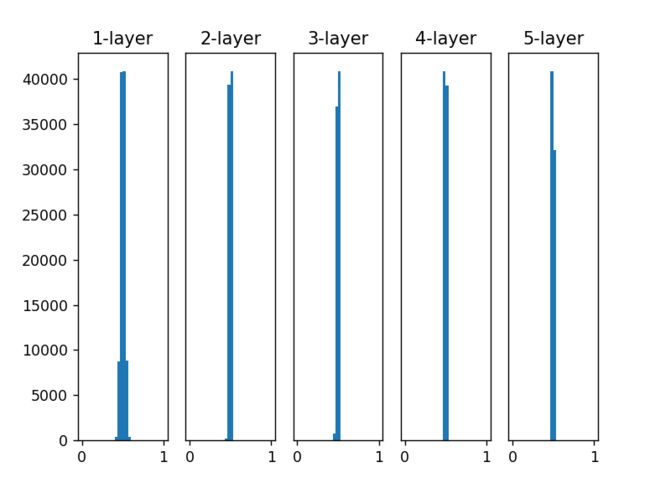
这次呈集中在0.5附近的分布。不会发生梯度消失。激活值的分布有所偏向,说明在表现力上会有很大问题。因为如果有多个神经元都输出几乎相同的值,那它们就没有存在的意义了。
各层的激活值的分布都要求有适当的广度。为什么呢?因为通过在各层间传递多样性的数据,神经网络可以进行高效的学习。反过来,如果传递的是有所偏向的数据,就会出现梯度消失或者“表现力受限”的问题,导致学习可能无法顺利进行。
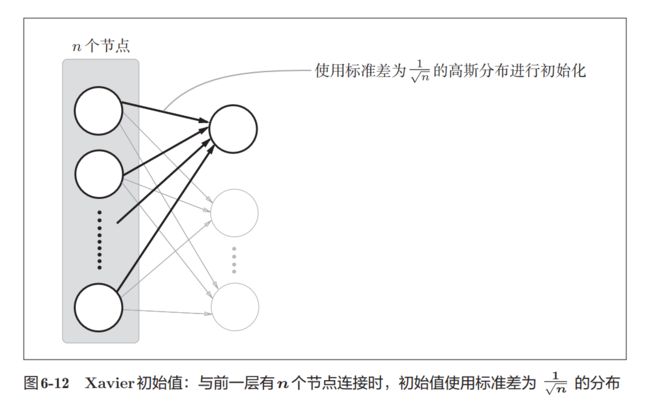
接着,我们尝试使用Xavier Glorot等人的论文中推荐的权重初始值(俗称“Xavier初始值”)。现在,在一般的深度学习框架中,Xavier初始值已被作为标准使用。
为了使各层的激活值呈现出具有相同广度的分布,如果前一层的节点数为n,则初始值使用标准差为根号n分之一的分布
2.2 ReLU的权重初始值
Xavier初始值是以激活函数是线性函数为前提而推导出来的。因为sigmoid函数和tanh函数左右对称,且中央附近可以视作线性函数,所以适合使用Xavier初始值。但当激活函数使用ReLU时,一般推荐使用ReLU专用的初始值,也就是Kaiming He等人推荐的初始值,也称为“He初始值”。

2.3 基于MNIST数据集的权重初始值的比较
下面通过实际的数据,观察不同的权重初始值的赋值方法会在多大程度上影响神经网络的学习。这里,我们基于std = 0.01、Xavier初始值、He初始值进行实验:
# coding: utf-8
import os
import sys
sys.path.append(os.pardir) # 为了导入父目录的文件而进行的设定
import numpy as np
import matplotlib.pyplot as plt
from dataset.mnist import load_mnist
from common.util import smooth_curve
from common.multi_layer_net import MultiLayerNet
from common.optimizer import SGD
# 0:读入MNIST数据==========
(x_train, t_train), (x_test, t_test) = load_mnist(normalize=True)
train_size = x_train.shape[0]
batch_size = 128
max_iterations = 2000
# 1:进行实验的设置==========
weight_init_types = {'std=0.01': 0.01, 'Xavier': 'sigmoid', 'He': 'relu'}
optimizer = SGD(lr=0.01)
networks = {}
train_loss = {}
for key, weight_type in weight_init_types.items():
networks[key] = MultiLayerNet(input_size=784, hidden_size_list=[100, 100, 100, 100],
output_size=10, weight_init_std=weight_type)
train_loss[key] = []
# 2:开始训练==========
for i in range(max_iterations):
batch_mask = np.random.choice(train_size, batch_size)
x_batch = x_train[batch_mask]
t_batch = t_train[batch_mask]
for key in weight_init_types.keys():
grads = networks[key].gradient(x_batch, t_batch)
optimizer.update(networks[key].params, grads)
loss = networks[key].loss(x_batch, t_batch)
train_loss[key].append(loss)
if i % 100 == 0:
print("===========" + "iteration:" + str(i) + "===========")
for key in weight_init_types.keys():
loss = networks[key].loss(x_batch, t_batch)
print(key + ":" + str(loss))
# 3.绘制图形==========
markers = {'std=0.01': 'o', 'Xavier': 's', 'He': 'D'}
x = np.arange(max_iterations)
for key in weight_init_types.keys():
plt.plot(x, smooth_curve(train_loss[key]), marker=markers[key], markevery=100, label=key)
plt.xlabel("iterations")
plt.ylabel("loss")
plt.ylim(0, 2.5)
plt.legend()
plt.show()
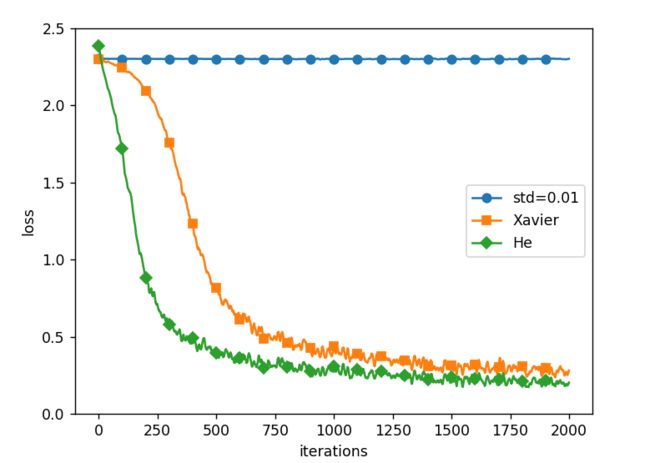
实验中,神经网络有5层,每层有100个神经元,激活函数使用的是ReLU。std = 0.01时完全无法进行学习。这和刚才观察到的激活值的分布一样,是因为正向传播中传递的值很小;因此,逆向传播时求到的梯度也很小,权重几乎不进行更新。相反,当权重初始值为Xavier初始值和He初始值时,学习进行得很顺利。并且,我们发现He初始值时的学习进度更快一些。
3.Batch Normalization
为了使各层拥有适当的广度,可以“强制性”地调整激活值的分布。
Batch Normalzation算法的优点:
1.可以使学习快速进行(可以增大学习率)。
2.不那么依赖初始值(对于初始值不用那么神经质)。
3.抑制过拟合(降低Dropout等的必要性)。
思路是调整各层的激活值分布使其拥有适当的广度。
为此,要向神经网络中插入对数据分布进行正规化的层,即Batch Normalization层。
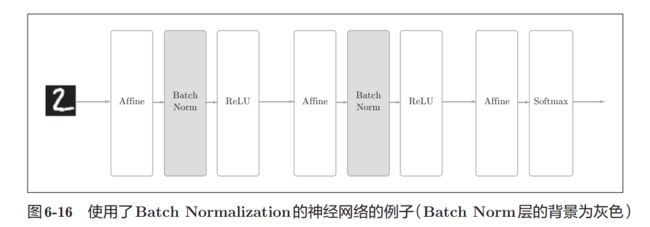
Batch Norm,顾名思义,以进行学习时的mini-batch为单位,按mini-batch进行正规化。具体而言,就是进行使数据分布的均值为0、方差为1的正规化。用数学式表示的话,如下所示:

上式所做的是将mini-batch的输入数据{x1, x2, … , xm}变换为均值为0、方差为1的数据{x1^ , x2^ , x3^ …, xm^ } ,非常简单。通过将这个处理插入到激活函数的前面(或者后面)A,可以减小数据分布的偏向。
接着,Batch Norm层会对正规化后的数据进行缩放和平移的变换,用数学式可以如下表示:
这里,γ和β是参数。一开始γ = 1,β = 0,然后再通过学习调整到合
适的值。

我们发现,几乎所有的情况下都是使用Batch Norm时学习进行得更快。
同时也可以发现,实际上,在不使用Batch Norm的情况下,如果不赋予一
个尺度好的初始值,学习将完全无法进行。
4.正则化
4.1 过拟合
原因:模型拥有大量参数,表现力强;训练数据少。
权值衰减是一直以来经常被使用的一种抑制过拟合的方法。该方法通过在学习的过程中对大的权重进行惩罚,来抑制过拟合。很多过拟合原本就是因为权重参数取值过大才发生的。
复习一下,神经网络的学习目的是减小损失函数的值。这时,例如为损失函数加上权重的平方范数(L2范数,L2范数相当于各个元素的平方和)。这样一来,就可以抑制权重变大。用符号表示的话,如果将权重记为W,L2范数的权值衰减就是1/2 λW^2 ,然后将其加到损失函数上。这里,λ是控制正则化强度的超参数。λ设置得越大,对大的权重施加的惩罚就越重。此外, 开头的1/2是用于将求导结果变成λW的调整用常量。
#coding: utf-8
import os
import sys
sys.path.append(os.pardir) # 为了导入父目录的文件而进行的设定
import numpy as np
import matplotlib.pyplot as plt
from dataset.mnist import load_mnist
from common.multi_layer_net import MultiLayerNet
from common.optimizer import SGD
(x_train, t_train), (x_test, t_test) = load_mnist(normalize=True)
#为了再现过拟合,减少学习数据
x_train = x_train[:300]
t_train = t_train[:300]
#weight decay(权值衰减)的设定 =======================
#weight_decay_lambda = 0 # 不使用权值衰减的情况
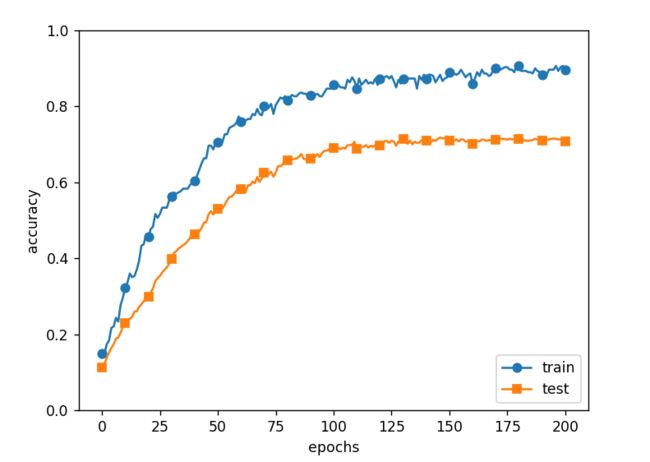
weight_decay_lambda = 0.1
# ====================================================
network = MultiLayerNet(input_size=784, hidden_size_list=[100, 100, 100, 100, 100, 100], output_size=10,
weight_decay_lambda=weight_decay_lambda)
optimizer = SGD(lr=0.01)
max_epochs = 201
train_size = x_train.shape[0]
batch_size = 100
train_loss_list = []
train_acc_list = []
test_acc_list = []
iter_per_epoch = max(train_size / batch_size, 1)
epoch_cnt = 0
for i in range(1000000000):
batch_mask = np.random.choice(train_size, batch_size)
x_batch = x_train[batch_mask]
t_batch = t_train[batch_mask]
grads = network.gradient(x_batch, t_batch)
optimizer.update(network.params, grads)
if i % iter_per_epoch == 0:
train_acc = network.accuracy(x_train, t_train)
test_acc = network.accuracy(x_test, t_test)
train_acc_list.append(train_acc)
test_acc_list.append(test_acc)
print("epoch:" + str(epoch_cnt) + ", train acc:" + str(train_acc) + ", test acc:" + str(test_acc))
epoch_cnt += 1
if epoch_cnt >= max_epochs:
break
#3.绘制图形==========
markers = {'train': 'o', 'test': 's'}
x = np.arange(max_epochs)
plt.plot(x, train_acc_list, marker='o', label='train', markevery=10)
plt.plot(x, test_acc_list, marker='s', label='test', markevery=10)
plt.xlabel("epochs")
plt.ylabel("accuracy")
plt.ylim(0, 1.0)
plt.legend(loc='lower right')
plt.show()
虽然训练数据的识别精度和测试数据的识别精度之间有差距,但是与没有使用权值衰减的结果相比,差距变小了。这说明过拟合受到了抑制。
4.2 Dropout
如果网络的模型变得很复杂,只用权值衰减就难以应对了。在这种情况下,我们经常会使用Dropout 方法。Dropout是一种在学习的过程中随机删除神经元的方法。训练时,随机选出隐藏层的神经元,然后将其删除。被删除的神经元不再进行信号的传递。训练时,每传递一次数据,就会随机选择要删除的神经元。然后,测试时,虽然会传递所有的神经元信号,但是对于各个神经元的输出,要乘上训练时的删除比例后再输出。
class Dropout:
def __init__(self, dropout_ratio=0.5):
self.dropout_ratio = dropout_ratio
self.mask = None
def forward(self, x, train_flg=True):
if train_flg:
self.mask = np.random.rand(*x.shape) > self.dropout_ratio
return x * self.mask
else:
return x * (1.0 - self.dropout_ratio)
def backward(self, dout):
return dout * self.mask
每次正向传播时,self.mask中都会以False的形式保存要删除的神经元。self.mask会随机生成和x形状相同的数组,并将值比dropout_ratio大的元素设为True。
正向传播时没有传递信号的神经元,反向传播时信号将停在那里。
(x_train, t_train), (x_test, t_test) = load_mnist(normalize=True)
# 为了再现过拟合,减少学习数据
x_train = x_train[:300]
t_train = t_train[:300]
# 设定是否使用Dropuout,以及比例 ========================
use_dropout = True # 不使用Dropout的情况下为False
dropout_ratio = 0.2
# ====================================================
network = MultiLayerNetExtend(input_size=784, hidden_size_list=[100, 100, 100, 100, 100, 100],
output_size=10, use_dropout=use_dropout, dropout_ration=dropout_ratio)
trainer = Trainer(network, x_train, t_train, x_test, t_test,
epochs=301, mini_batch_size=100,
optimizer='sgd', optimizer_param={'lr': 0.01}, verbose=True)
trainer.train()
train_acc_list, test_acc_list = trainer.train_acc_list, trainer.test_acc_list
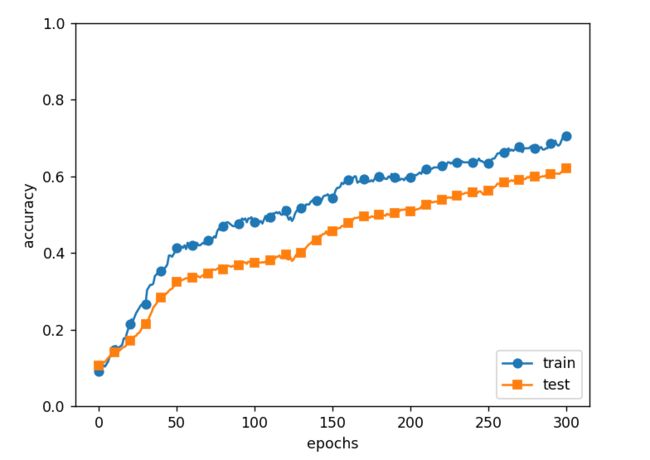
通过使用Dropout,训练数据和测试数据的识别精度的差距变小了。并且,训练数据也没有到达100%的识别精度。像这样,通过使用Dropout,即便是表现力强的网络,也可以抑制过拟合。
5.超参数的验证
神经网络中,除了权重和偏置等参数,超参数(hyper-parameter)也经常出现。这里所说的超参数是指,比如各层的神经元数量、batch大小、参数更新时的学习率或权值衰减等。如果这些超参数没有设置合适的值,模型的性能就会很差。虽然超参数的取值非常重要,但是在决定超参数的过程中一般会伴随很多的试错。本节将介绍尽可能高效地寻找超参数的值的方法。
5.1 验证数据
调整超参数时,必须使用超参数专用的确认数据。用于调整超参数的数据,一般称为验证数据(validation data)。我们使用这个验证数据来评估超参数的好坏。
(x_train, t_train), (x_test, t_test) = load mnist()
# 打乱训练数据
x_train, t_train = shuffle_dataset(x_train, t_train)
# 分割验证数据
validation_rate = 0.20
validation_num = int(x_train.shape[0] * validation_rate)
x_val = x_train[:validation_num]
t_val = t_train[:validation_num]
x_train = x_train[validation_num:]
t_train = t_train[validation_num:]
进行超参数的最优化时,逐渐缩小超参数的“好值”的存在范围非常重要。所谓逐渐缩小范围,是指一开始先大致设定一个范围,从这个范围中随机选出一个超参数(采样),用这个采样到的值进行识别精度的评估;然后,多次重复该操作,观察识别精度的结果,根据这个结果缩小超参数的“好值”的范围。
通过重复这一操作,就可以逐渐确定超参数的合适范围。
超参数最优化的内容
步骤0
设定超参数范围
步骤1
从设定的超参数范围中随机采样
步骤2
使用步骤1中采样到的超参数的值进行学习,通过验证数据评估识别精度(但是要将epoch设置得很小)
步骤3
重复步骤1和步骤2(100次等),根据它们的识别精度的结果,缩小超参数的范围。
反复进行上述操作,不断缩小超参数的范围,在缩小到一定程度时,从该范围中选出一个超参数的值。这就是进行超参数的最优化的一种方法。
第七章卷积神经网络
本章的主题是卷积神经网络(Convolutional Neural Network,CNN)。CNN被用于图像识别、语音识别等各种场合,在图像识别的比赛中,基于深度学习的方法几乎都以CNN为基础。
1.整体结构
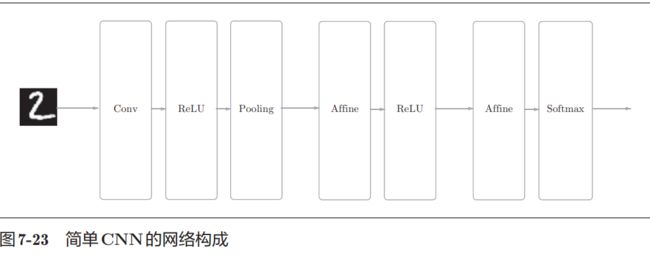
CNN中新出现了卷积层(Convolution层)和池化层(Pooling层)。之前介绍的神经网络中,相邻层的所有神经元之间都有连接,这称为全连接(fully-connected)。
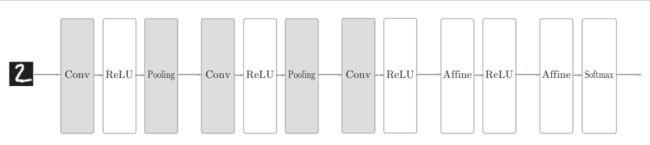
CNN 中新增了 Convolution 层 和 Pooling 层。CNN 的层的连接顺序是“Convolution - ReLU -(Pooling)”(Pooling层有时会被省略)。这可以理解为之前的“Affi ne - ReLU”连接被替换成了“Convolution - ReLU -(Pooling)”连接。
还需注意的是,靠近输出的层中使用了之前的“Affi ne - ReLU”组合。此外,最后的输出层中使用了之前的“Affi ne - Softmax”组合。
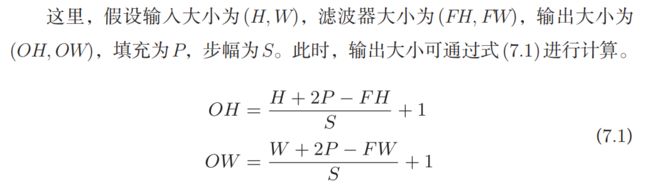
2.卷积层
CNN中出现了一些特有的术语,比如填充、步幅等。此外,各层中传递的数据是有形状的数据(比如,3维数据),这与之前的全连接网络不同。
2.1 全连接层存在的问题
数据的形状被“忽视”了。比如,输入数据是图像时,图像通常是高、长、通道方向上的3维形状。但是,向全连接层输入时,需要将3维数据拉平为1维数据。实际上,前面提到的使用了MNIST数据集的例子中,输入图像就是1通道、高28像素、长28像素的(1, 28, 28)形状,但却被排成1列,以784个数据的形式输入到最开始的Affine层。
图像是3维形状,这个形状中应该含有重要的空间信息。比如,空间上邻近的像素为相似的值、RBG的各个通道之间分别有密切的关联性、相距较远的像素之间没有什么关联等,3维形状中可能隐藏有值得提取的本质模式。但是,因为全连接层会忽视形状,将全部的输入数据作为相同的神经元(同一维度的神经元)处理,所以无法利用与形状相关的信息。
卷积层可以保持形状不变。当输入数据是图像时,卷积层会以3维数据的形式接收输入数据,并同样以3维数据的形式输出至下一层。因此,在CNN中,可以(有可能)正确理解图像等具有形状的数据。
另外,CNN 中,有时将卷积层的输入输出数据称为特征图(feature map)。其中,卷积层的输入数据称为输入特征图(input feature map),输出数据称为输出特征图**(output feature map)**。
2.2 卷积运算
卷积层进行的处理就是卷积运算。卷积运算相当于图像处理中的“滤波器运算”。

对于输入数据,卷积运算以一定间隔滑动滤波器的窗口并应用。这里所说的窗口是指图7-4中灰色的3 × 3的部分。如图7-4所示,将各个位置上滤波器的元素和输入的对应元素相乘,然后再求和(有时将这个计算称为乘积累加运算)。然后,将这个结果保存到输出的对应位置。将这个过程在所有位置都进行一遍,就可以得到卷积运算的输出。
在全连接的神经网络中,除了权重参数,还存在偏置。CNN中,滤波器的参数就对应之前的权重。并且,CNN中也存在偏置。

2.3 填充
在进行卷积层的处理之前,有时要向输入数据的周围填入固定的数据(比如0等),这称为填充(padding),是卷积运算中经常会用到的处理。填充值可以设置为1、2、3等任意的整数,“幅度为1的填充”是指用幅度为1像素的0填充周围。
使用填充主要是为了调整输出的大小。如果每次进行卷积运算都会缩小空间,那么在某个时刻输出大小就有可能变为 1,导致无法再应用卷积运算。为了避免出现这样的情况,就要使用填充。
2.4 步幅
应用滤波器的位置间隔称为步幅(stride)。下为步幅2的例子:
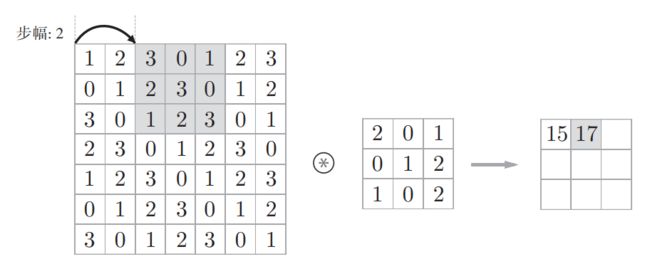
综上,增大步幅后,输出大小会变小。而增大填充后,输出大小会变大。
2.5 3维数据的卷积运算
之前的卷积运算的例子都是以有高、长方向的2维形状为对象的。但是,图像是3维数据,除了高、长方向之外,还需要处理通道方向。
以3维数据为例,可以发现纵深方向(通道方向)上特征图增加了。通道方向上有多个特征图时,会按通道进行输入数据和滤波器的卷积运算,并将结果相加,从而得到输出。

通道数只能设定为和输入数据的通道数相同的值
2.6 结合方块思考
滤波器也一样,要按(channel, height, width)的顺序书写。比如,通道数为C、滤波器高度为FH(Filter Height)、长度为FW(Filter Width)时,可以写成(C, FH, FW)。

关于卷积运算的滤波器,也必须考虑滤波器的数量。因此,作为4维数据,滤波器的权重数据要按(output_channel, input_channel, height, width)的顺序书写。比如,通道数为3、大小为5 × 5的滤波器有20个时,可以写成(20, 3, 5, 5)。
3 池化层
池化是缩小高、长方向上的空间的运算。如图,进行将2 × 2的区域集约成1个元素的处理,缩小空间大小。
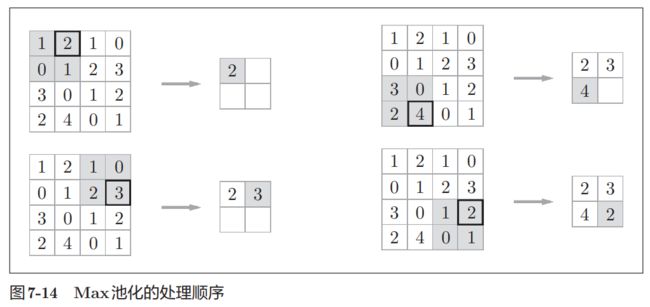
图7-14的例子是按步幅2进行2 × 2的Max池化时的处理顺序。“Max池化”是获取最大值的运算,“2 × 2”表示目标区域的大小。如图所示,从2 × 2的区域中取出最大的元素。此外,这个例子中将步幅设为了2,所以2 × 2的窗口的移动间隔为2个元素。另外,一般来说,池化的窗口大小会和步幅设定成相同的值。
除了Max池化之外,还有Average池化等。相对于Max池化是从目标区域中取出最大值,Average池化则是计算目标区域的平均值。在图像识别领域,主要使用Max池化。因此,本书中说到“池化层”时,指的是Max池化。
池化层的特征
没有要学习的参数:池化层和卷积层不同,没有要学习的参数。池化只是从目标区域中取最大值(或者平均值),所以不存在要学习的参数。
通道数不发生变化:经过池化运算,输入数据和输出数据的通道数不会发生变化。
对微小的位置变化具有鲁棒性(健壮):输入数据发生微小偏差时,池化仍会返回相同的结果。因此,池化对输入数据的微小偏差具有鲁棒性。
4 卷积层和池化层的实现
4.1 基于im2col的展开
im2col是一个函数,将输入数据展开以适合滤波器(权重)。对3维的输入数据应用im2col后,数据转换为2维矩阵(正确地讲,是把包含批数量的4维数据转换成了2维数据)。

为了便于观察,将步幅设置得很大,以使滤波器的应用区域不重叠。而在实际的卷积运算中,滤波器的应用区域几乎都是重叠的。在滤波器的应用区域重叠的情况下,使用im2col展开后,展开后的元素个数会多于原方块的元素个数。因此,使用im2col的实现存在比普通的实现消耗更多内存的缺点。但是,汇总成一个大的矩阵进行计算,对计算机的计算颇有益处。比如,在矩阵计算的库(线性代数库)等中,矩阵计算的实现已被高度最优化,可以高速地进行大矩阵的乘法运算。因此,通过归结到矩阵计算上,可以有效地利用线性代数库。
im2col这个名称是“image to column”的缩写,翻译过来就是“从图像到矩阵”的意思。Caffe、Chainer 等深度学习框架中有名为im2col的函数,并且在卷积层的实现中,都使用了im2col。

4.3 卷积层的实现
本书提供了im2col函数,并将这个im2col函数作为黑盒使用。

class Convolution:
def __init__(self, W, b, stride=1, pad=0):
self.W = W
self.b = b
self.stride = stride
self.pad = pad
def forward(self, x):
FN, C, FH, FW = self.W.shape # C为通道数,FN为滤波器个数
# 滤波器高度FH,长度为FW
N, C, H, W = x.shape
out_h = int(1 + (H + 2*self.pad - FH) / self.stride)
out_w = int(1 + (W + 2*self.pad - FW) / self.stride)
col = im2col(x, FH, FW, self.stride, self.pad)
col_W = self.W.reshape(FN, -1).T # 滤波器的展开
#这里通过reshape(FN,-1)将参数指定为-1,这是reshape的一个便利的功能。
#通过在reshape时指定为-1,reshape函数会自动计算-1维度上的元素个数,以使多维数组的元素个数前后一致。
#比如,(10, 3, 5, 5)形状的数组的元素个数共有750个,指定reshape(10,-1)后,就会转换成(10, 75)形状的数组。
out = np.dot(col, col_W) + self.b
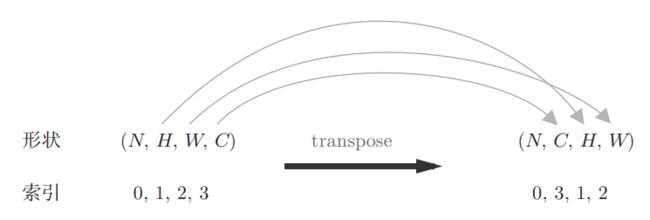
out = out.reshape(N, out_h, out_w, -1).transpose(0,3,1,2)
return out
forward的实现中,最后会将输出大小转换为合适的形状。转换时使用了NumPy的transpose函数。transpose会更改多维数组的轴的顺序。如图所示,通过指定从0开始的索引(编号)序列,就可以更改轴的顺序。
4.4 池化层的实现
池化层的实现和卷积层相同,都使用im2col展开输入数据。不过,池化的情况下,在通道方向上是独立的,这一点和卷积层不同。
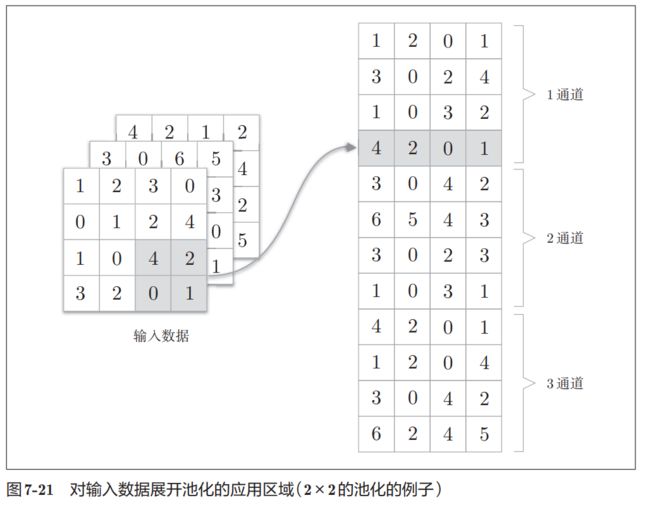
像这样展开之后,只需对展开的矩阵求各行的最大值,并转换为合适的形状即可。

class Pooling:
def __init__(self, pool_h, pool_w, stride=1, pad=0):
self.pool_h = pool_h
self.pool_w = pool_w
self.stride = stride
self.pad = pad
self.x = None
self.arg_max = None
def forward(self, x):
N, C, H, W = x.shape
out_h = int(1 + (H - self.pool_h) / self.stride)
out_w = int(1 + (W - self.pool_w) / self.stride)
#展开
col = im2col(x, self.pool_h, self.pool_w, self.stride, self.pad)
col = col.reshape(-1, self.pool_h*self.pool_w)
arg_max = np.argmax(col, axis=1)
out = np.max(col, axis=1) #最大值
#np.max可以指定axis参数,并在这个参数指定的各个轴方向上求最大值。
#比如,如果写成np.max(x, axis=1),就可以在输入x的第1维的各个轴方向上求最大值
out = out.reshape(N, out_h, out_w, C).transpose(0, 3, 1, 2) #转换
self.x = x
self.arg_max = arg_max
return out
def backward(self, dout):
dout = dout.transpose(0, 2, 3, 1)
pool_size = self.pool_h * self.pool_w
dmax = np.zeros((dout.size, pool_size))
dmax[np.arange(self.arg_max.size), self.arg_max.flatten()] = dout.flatten()
dmax = dmax.reshape(dout.shape + (pool_size,))
dcol = dmax.reshape(dmax.shape[0] * dmax.shape[1] * dmax.shape[2], -1)
dx = col2im(dcol, self.x.shape, self.pool_h, self.pool_w, self.stride, self.pad)
return dx
池化层的三个阶段:①展开输入数据。②求各行的最大值。③转换为合适的输出大小。
5. CNN的实现
# coding: utf-8
import sys, os
sys.path.append(os.pardir) # 为了导入父目录的文件而进行的设定
import pickle
import numpy as np
from collections import OrderedDict
from common.layers import *
from common.gradient import numerical_gradient
class SimpleConvNet:
"""简单的ConvNet
conv - relu - pool - affine - relu - affine - softmax
Parameters
----------
input_size : 输入大小(MNIST的情况下为784)
hidden_size_list : 隐藏层的神经元数量的列表(e.g. [100, 100, 100])
output_size : 输出大小(MNIST的情况下为10)
activation : 'relu' or 'sigmoid'
weight_init_std : 指定权重的标准差(e.g. 0.01)
指定'relu'或'he'的情况下设定“He的初始值”
指定'sigmoid'或'xavier'的情况下设定“Xavier的初始值”
"""
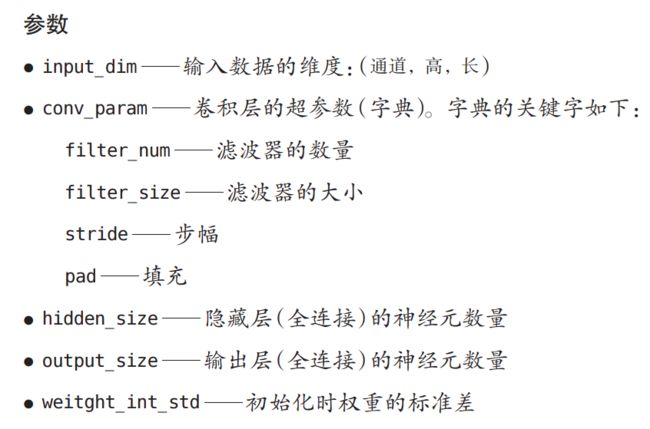
def __init__(self, input_dim=(1, 28, 28),
conv_param={'filter_num':30, 'filter_size':5, 'pad':0, 'stride':1},
hidden_size=100, output_size=10, weight_init_std=0.01):
filter_num = conv_param['filter_num']
filter_size = conv_param['filter_size']
filter_pad = conv_param['pad']
filter_stride = conv_param['stride']
input_size = input_dim[1]
conv_output_size = (input_size - filter_size + 2*filter_pad) / filter_stride + 1
pool_output_size = int(filter_num * (conv_output_size/2) * (conv_output_size/2))
# 初始化权重
self.params = {}
self.params['W1'] = weight_init_std * \
np.random.randn(filter_num, input_dim[0], filter_size, filter_size)
self.params['b1'] = np.zeros(filter_num)
self.params['W2'] = weight_init_std * \
np.random.randn(pool_output_size, hidden_size)
self.params['b2'] = np.zeros(hidden_size)
self.params['W3'] = weight_init_std * \
np.random.randn(hidden_size, output_size)
self.params['b3'] = np.zeros(output_size)
# 生成层
self.layers = OrderedDict()
self.layers['Conv1'] = Convolution(self.params['W1'], self.params['b1'],
conv_param['stride'], conv_param['pad'])
self.layers['Relu1'] = Relu()
self.layers['Pool1'] = Pooling(pool_h=2, pool_w=2, stride=2)
self.layers['Affine1'] = Affine(self.params['W2'], self.params['b2'])
self.layers['Relu2'] = Relu()
self.layers['Affine2'] = Affine(self.params['W3'], self.params['b3'])
self.last_layer = SoftmaxWithLoss()
def predict(self, x):
for layer in self.layers.values():
x = layer.forward(x)
return x
def loss(self, x, t):
"""求损失函数
参数x是输入数据、t是教师标签
"""
y = self.predict(x)
return self.last_layer.forward(y, t)
def accuracy(self, x, t, batch_size=100):
if t.ndim != 1 : t = np.argmax(t, axis=1)
acc = 0.0
for i in range(int(x.shape[0] / batch_size)):
tx = x[i*batch_size:(i+1)*batch_size]
tt = t[i*batch_size:(i+1)*batch_size]
y = self.predict(tx)
y = np.argmax(y, axis=1)
acc += np.sum(y == tt)
return acc / x.shape[0]
def numerical_gradient(self, x, t):
"""求梯度(数值微分)
Parameters
----------
x : 输入数据
t : 教师标签
Returns
-------
具有各层的梯度的字典变量
grads['W1']、grads['W2']、...是各层的权重
grads['b1']、grads['b2']、...是各层的偏置
"""
loss_w = lambda w: self.loss(x, t)
grads = {}
for idx in (1, 2, 3):
grads['W' + str(idx)] = numerical_gradient(loss_w, self.params['W' + str(idx)])
grads['b' + str(idx)] = numerical_gradient(loss_w, self.params['b' + str(idx)])
return grads
def gradient(self, x, t):
"""求梯度(误差反向传播法)
Parameters
----------
x : 输入数据
t : 教师标签
Returns
-------
具有各层的梯度的字典变量
grads['W1']、grads['W2']、...是各层的权重
grads['b1']、grads['b2']、...是各层的偏置
"""
# forward
self.loss(x, t)
# backward
dout = 1
dout = self.last_layer.backward(dout)
layers = list(self.layers.values())
layers.reverse()
for layer in layers:
dout = layer.backward(dout)
# 设定
grads = {}
grads['W1'], grads['b1'] = self.layers['Conv1'].dW, self.layers['Conv1'].db
grads['W2'], grads['b2'] = self.layers['Affine1'].dW, self.layers['Affine1'].db
grads['W3'], grads['b3'] = self.layers['Affine2'].dW, self.layers['Affine2'].db
return grads
def save_params(self, file_name="params.pkl"):
params = {}
for key, val in self.params.items():
params[key] = val
with open(file_name, 'wb') as f:
pickle.dump(params, f)
def load_params(self, file_name="params.pkl"):
with open(file_name, 'rb') as f:
params = pickle.load(f)
for key, val in params.items():
self.params[key] = val
for i, key in enumerate(['Conv1', 'Affine1', 'Affine2']):
self.layers[key].W = self.params['W' + str(i+1)]
self.layers[key].b = self.params['b' + str(i+1)]
第八章深度学习
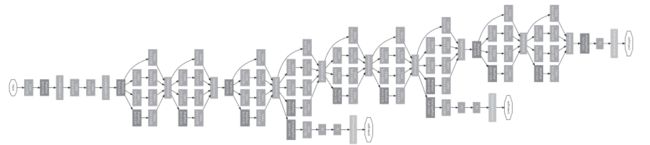
深度学习是加深了层的深度神经网络。基于之前介绍的网络,只需通过叠加层,就可以创建深度网络。

如图8-1所示,这个网络的层比之前实现的网络都更深。这里使用的卷积层全都是3 × 3的小型滤波器,特点是随着层的加深,通道数变大(卷积层的通道数从前面的层开始按顺序以16、16、32、32、64、64的方式增加)。此外,如图8-1所示,插入了池化层,以逐渐减小中间数据的空间大小;并且,
后面的全连接层中使用了Dropout层。这个网络使用He初始值作为权重的初始值,使用Adam更新权重参数。

1.1 VGG
VGG是由卷积层和池化层构成的基础的CNN。它的特点在于将有权重的层(卷积层或者全连接层)叠加至16层(或者19层),具备了深度(根据层的深度,有时也称为“VGG16”或“VGG19”)。
VGG在 2014年的比赛中最终获得了第 2名的成绩,虽然在性能上不及 GoogleNet,但
因为 VGG结构简单,应用性强。

1.2 GoogLeNet
实际上它基本上和之前介绍的CNN结构相同。不过,GoogLeNet的特征是,网络不仅在纵向上有深度,在横向上也有深度(广度)。GoogLeNet在横向上有“宽度”,这称为Inception结构。
Inception结构使用了多个大小不同的滤波器(和池化),最后再合并它们的结果。GoogLeNet的特征就是将这个Inception结构用作一个构件(构成元素)。此外,在GoogLeNet中,很多地方都使用了大小为1 × 1的滤波器的卷积层。这个1 × 1的卷积运算通过在通道方向上减小大小,有助于减少参数和实现高速化处理。

1.3 ResNet
ResNet是微软团队开发的网络。它的特征在于具有比以前的网络更深的结构。
在深度学习中,过度加深层的话,很多情况下学习将不能顺利进行,导致最终性能不佳。ResNet中,
为了解决这类问题,导入了“快捷结构”。快捷结构横跨(跳过)了输入数据的卷积层,将输入x合
计到输出。
ResNet以前面介绍过的VGG网络为基础,引入快捷结构以加深层:

ResNet通过以2个卷积层为间隔跳跃式地连接来加深层。另外,根据实验的结果,即便加深到150层以上,识别精度也会持续提高。
实践中经常会灵活应用使用ImageNet这个巨大的数据集学习到的权重数据,这称为迁移学习,将学习完的权重(的一部分)复制到其他神经网络,进行再学习(fine tuning)。
2 分布式学习
为了进一步提高深度学习所需的计算的速度,可以考虑在多个GPU或者多台机器上进行分布式计算。现在的深度学习框架中,出现了好几个支持多GPU或者多机器的分布式学习的框架。其中,Google的TensorFlow、微软的CNTK(Computational Network Toolki)在开发过程中高度重视分布式学习。以大型数据中心的低延迟·高吞吐网络作为支撑,基于这些框架的分布式学习呈现出惊人的效果。

3 深度学习的应用案例
3.1 物体检测
物体检测是从图像中确定物体的位置,并进行分类的问题。对于这样的物体检测问题,人们提出了多个基于CNN的方法。这些方法展示了非常优异的性能,并且证明了在物体检测的问题上,深度学习是非常有效的。
在使用CNN进行物体检测的方法中,有一个叫作R-CN的有名的方法。下图显示了R-CNN的处理流。

大家注意图中的“2.Extract region proposals”(候选区域的提取)和“3.Compute CNN features”(CNN特征的计算)的处理部分。这里,首先(以某种方法)找出形似物体的区域,然后对提取出的区域应用CNN进行分类。R-CNN中会将图像变形为正方形,或者在分类时使用SVM(支持向量机),实际的处理流会稍微复杂一些,不过从宏观上看,也是由刚才的两个处理(候选区域的提取和CNN特征的计算)构成的。
3.2 图像分割
图像分割是指在像素水平上对图像进行分类。要基于神经网络进行图像分割,最简单的方法是以所有像素为对象,对每个像素执行推理处理。比如,准备一个对某个矩形区域中心的像素进行分
类的网络,以所有像素为对象执行推理处理。正如大家能想到的,这样的方法需要按照像素数量进行相应次forward处理,因而需要耗费大量的时间(正确地说,卷积运算中会发生重复计算很多区域的无意义的计算)。为了解决这个无意义的计算问题,有人提出了一个名为FCN(Fully Convolutional Network)的方法。该方法通过一次forward处理,对所有像素进行分类。
FCN的字面意思是“全部由卷积层构成的网络”。相对于一般的CNN包含全连接层,FCN将全连接层替换成发挥相同作用的卷积层。在物体识别中使用的网络的全连接层中,中间数据的空间容量被作为排成一列的节点进行处理,而只由卷积层构成的网络中,空间容量可以保持原样直到最后的输出。
如图所示,FCN的特征在于最后导入了扩大空间大小的处理。基于这个处理,变小了的中间数据可以一下子扩大到和输入图像一样的大小。FCN最后进行的扩大处理是基于双线性插值法的扩大(双线性插值扩大)。FCN中,这个双线性插值扩大是通过去卷积(逆卷积运算)来实现的。

全连接层中,输出和全部的输入相连。使用卷积层也可以实现与此结构完全相同的连接。比如,针对输入大小是 32×10×10(通道数 32、高 10、长 10)的数据的全连接层可以替换成滤波器大小为32×10×10的卷积层。如果全连接层的输出节点数是 100,那么在卷积层准备 100个 32×10×10的滤波器就可以实现完全相同的处理。像这样,全连接层可以替换成进行相同处理的卷积层。
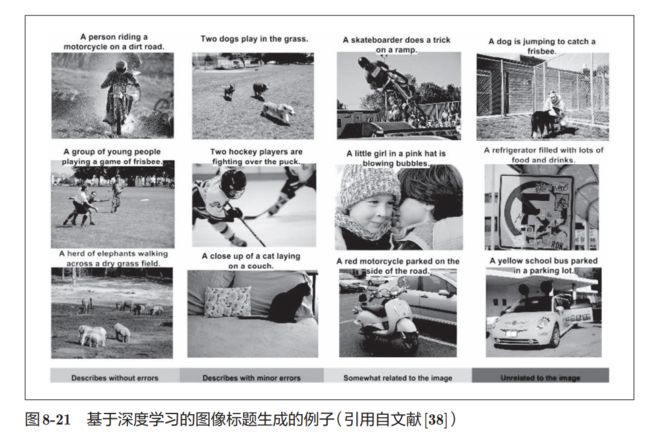
3.3 图像标题的生成
有一项融合了计算机视觉和自然语言的有趣的研究,该研究如图8-21所示,给出一个图像后,会自动生成介绍这个图像的文字(图像的标题)。
一个基于深度学习生成图像标题的代表性方法是被称为NIC(Neural Image Caption)的模型。
NIC由深层的CNN和处理自然语言的RNN(Recurrent Neural Network)构成。RNN是呈递归式连接的网络,经常被用于自然语言、时间序列数据等连续性的数据上。
NIC基于CNN从图像中提取特征,并将这个特征传给RNN。RNN以CNN提取出的特征为初始值,递归地生成文本。NIC是组合了两个神经网络(CNN和RNN)的简单结构。我们将组合图像和自
然语言等多种信息进行的处理称为多模态处理。多模态处理是近年来备受关注的一个领域。
RNN的R表示Recurrent(递归的)。这个递归指的是神经网络的递归的网络结构。根据这个递归结构,神经网络会受到之前生成的信息的影响(换句话说,会记忆过去的信息),这是 RNN的特征。比如,生成“我”这个词之后,下一个要生成的词受到“我”这个词的影响,生成了“要”;然后,再受到前面生成的“我要”的影响,生成了“睡觉”这个词。对于自然语言、时间序列数据等连续性的数据,RNN以记
忆过去的信息的方式运行。
整本书历时20天,磕磕碰碰地看完了,对深度学习有一点点浅层了解了。在这个学习阶段,大部分代码看得都是云里雾里的,部分勉强可以看懂但很容易忘了一些层、函数的作用,整体学习比较慢。下一步的计划准备是了解一下GAN,看一下对抗样本、对抗攻击的论文,了解一些前置知识,主要去了解针对文本类的对抗样本相关知识。
加油加油 Fighting!!!