SLAM使用技术文档
**lio-sam环境配置
SLAM技术文档
安装ubuntu20.04版本 全覆盖上手使用指南
1***.对于前期处理工作(设置成中文化、输入法的安装)---------可以跳过
我把都给你放好了:https://blog.csdn.net/hwh20095000060/article/details/121438836----(中文)
//★对于输入法问题,20.04有想安搜狗的可以尝试一下,不过后期可能会出现页面丢失,桌面组件损坏等等一些列问题,正好可以锻炼你的能力哈哈
不想锻炼的用自带的https://blog.csdn.net/qq_33973712/article/details/120234707
**
2.**安装opencv 4.3.0
安装链接https://blog.csdn.net/c2250645962/article/details/107160521/
因为OpenCV4以上版本默认不使用pkg-config
对于最后运行以下command查看安装版本,无法显示的问题
https://blog.csdn.net/qq_38505858/article/details/117780774
https://blog.csdn.net/weixin_54787250/article/details/118873544
3.安装 GTSAM (Georgia Tech Smoothing and Mapping library, 4.0.0-alpha2)
https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
下载链接中的文件,并提取到home中
然后执行
cd gtsam-4.0.0-alpha2
mkdir build
cd build
cmake ..
sudo make install
4.安装vtk-7.1.1
**①首先安装X11`
sudo apt-get install libx11-dev libxext-dev libxtst-dev libxrender-dev libxmu-dev libxmuu-dev
②安装OpenGL
sudo apt-get install build-essential libgl1-mesa-dev libglu1-mesa-dev
③安装 CMake-gui
sudo apt-get install cmake cmake-gui
④下载VTK7.1.1
https://www.vtk.org/download/

⑤下载后,进行安装
终端命令框中输入,启动
cmake-gui
设置where is the source code:的路径为文件夹VTK-7.1.1所在路径
在VTK-7.1.1的路径下新建文件夹build;
设置where to build the binaries:的路径为VTK-7.1.1下的build,如下图
之后点击左下方,点击“Configure”,在弹出对话框中选择“Current Generator”为“Unix MakeFiles”,其他信息默认就行,点击Finish 如图

完成之后会提示“Configuring done”;
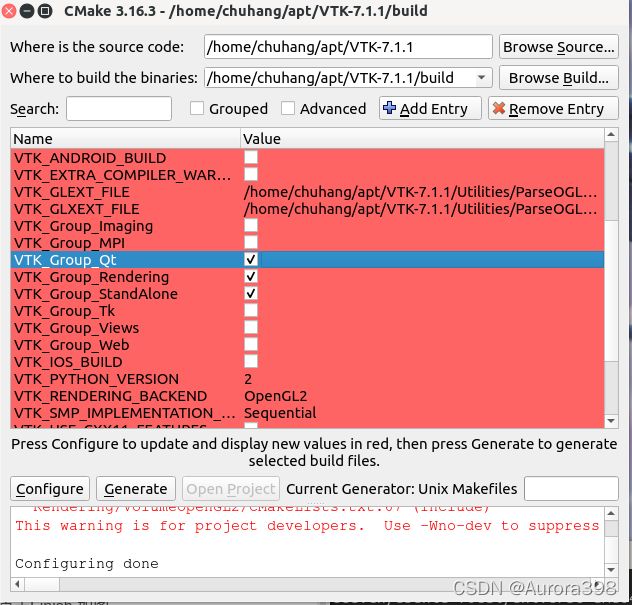
然后在里面勾选“VTK_GROUP_Qt”选项,再次点击“Configure”按钮,若提示警告信息,需要设置Qt安装路径,则设置路径后,再次点击“Configure”按钮;
其中可能会出现版本号不匹配的问题,如图,显示需要Qt.4.x版本
 解决方法如下链接,修改成4.x的版本即可
解决方法如下链接,修改成4.x的版本即可
https://blog.csdn.net/qq_43744723/article/details/119027641
修改完成后,查看一下版本号
qmake -v
 再次点击“Configure”按钮,完美运行,提示“Configure done”,点击“Generate”按钮,在vtk_build会生成工程文件,完成之后会提示“Generating done”,如下图
再次点击“Configure”按钮,完美运行,提示“Configure done”,点击“Generate”按钮,在vtk_build会生成工程文件,完成之后会提示“Generating done”,如下图
![]() 接下来打开终端命令
接下来打开终端命令
cd到vtk目录下的build文件夹,编译安装,时间略长,等待一下
sudo make
sudo make install
5.安装PCL
①首先安装依赖
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1.8 libflann-dev//
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libvtk5.10-qt4 libvtk5.10 libvtk5-dev//
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install qt-sdk openjdk-8-jdk openjdk-8-jre//
②可视化相关函数库安装
sudo apt-get install libopenni-dev
sudo apt-get install libopenni2-dev
③下载PCL
https://github.com/PointCloudLibrary/pcl.git
④编译PCL
cd pcl
mkdir release
cd release
cmake -DCMAKE_BUILD_TYPE=None -DCMAKE_INSTALL_PREFIX=/usr..
cmake -DBUILD_GPU=ON -DBUILD_apps=ON -DBUILD_examples=ON ..
cmake -DCMAKE_INSTALL_PREFIX=/usr ..
make
注意在上述cmake时,容易报错 =后面是创建文件夹CMakeLists.txt的地址,其中的 … 不能忘记
最后make的时候时间挺长,考虑直接make -j8 或者make -j4 可以尝试,我自己尝试的j8,直接Computer crashed
理由:用make -j带一个参数,可以把项目在进行并行编译,比如在一台双核的机器上,完全可以用make -j4,让make最多允许4个编译命令同时执行,这样可以更有效的利用CPU资源,在多核CPU上,适当的进行并行编译还是可以明显提高编译速度的
执行过程中,若出现以下问题:

The source… does not match the soused to generate cache. Re-run cmake…报错解决方法:把构建目录下所有的文件都删了,再编译就好使了,贴链接
https://blog.csdn.net/weixin_43360707/article/details/104046205
https://blog.csdn.net/bingfeiqiji/article/details/86554365
⑤编译lio-sam
打开终端命令,在Home目录下
mkdir apt //创建一个名为apt的文件夹
cd apt
mkdir catkin_ws
cd catkin_ws
mkdirmkdir src
cd ~/apt/catkin_ws/src //进入src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd ..
catkin_make
如果catkin_make编译失败(一般缺少两个包,提示缺少什么安装什么)
 最后
最后
sudo apt-get install ros-kinetic-cv-bridge //即可