仿射变换和透视变换
透视变换
- 1. 欧式变换
- 2. 相似变换
- 3. 仿射变换
- 4. 射影变换/透视变换
- 概念
- OpenCV 实现

3D 空间存在集中变换方式。
1. 欧式变换
欧式变换保持了向量的长度和夹角,相当于我们把一个刚体原封不动地进行了移动或旋转,不改变它自身的样子,其矩阵表示为:
T E = [ R t 0 T 1 ] \boldsymbol{T}_E=\left[\begin{array}{ll} \boldsymbol{R} & \boldsymbol{t} \\ \boldsymbol{0}^{\mathrm{T}} & 1 \end{array}\right] TE=[R0Tt1]
2. 相似变换
相似变换比欧式变换多了一个自由度,它允许物体进行均匀缩放,其矩阵表示为:
T S = [ s R t 0 T 1 ] \boldsymbol{T}_S=\left[\begin{array}{ll} s \boldsymbol{R} & \boldsymbol{t} \\ \boldsymbol{0}^{\mathrm{T}} & 1 \end{array}\right] TS=[sR0Tt1]
注意,旋转部分多了一个缩放因子 s s s,表示我们在对向量旋转之后,可以在 x , y , z x, y, z x,y,z 三个坐标上进行均匀缩放。由于含有缩放,相似变换不再保持图形的面积不变。你可以想象一个边长为 1 1 1 的立方体通过相似变换后,变成边长为 10 10 10 的样子 (但仍然是立方体)。三维相似变换的集合也叫作相似变换群,记作 Sim ( 3 ) \operatorname{Sim}(3) Sim(3) 。
3. 仿射变换
仿射变换的矩阵形式如下:
T A = [ A t 0 T 1 ] . \boldsymbol{T}_A=\left[\begin{array}{cc} \boldsymbol{A} & \boldsymbol{t} \\ \boldsymbol{0}^{\mathrm{T}} & 1 \end{array}\right] . TA=[A0Tt1].
与欧式变换不同的是,仿射变换只要求 A \boldsymbol{A} A 是一个可逆矩阵,而不必是正交矩阵( R R T = I RR^T=I RRT=I)。仿射变换也叫正交投影。经过仿射变换之后,立方体就不再是方的了,但是各个面仍然是平行四边形(自由度:9+3=12)。
4. 射影变换/透视变换
射影变换是最一般的变换,它的矩阵形式为:
T P = [ A t a T v ] . \boldsymbol{T}_P=\left[\begin{array}{ll} \boldsymbol{A} & \boldsymbol{t} \\ \boldsymbol{a}^{\mathrm{T}} & v \end{array}\right] . TP=[AaTtv].
它的左上角为可逆矩阵 A \boldsymbol{A} A,右上角为平移 t \boldsymbol{t} t,左下角为缩放 a T \boldsymbol{a}^{\mathrm{T}} aT。由于采用了齐次坐标,当 v ≠ 0 v \neq 0 v=0 时,我们可以对整个矩阵除以 v v v 得到一个右下角为 1 1 1 的矩阵;否则得到右下角为 0 0 0 的矩阵。因此, 2 D 2 \mathrm{D} 2D 的射影变换一共有 8 8 8 个自由度,3D 则共有 15 15 15 个自由度。射影变换是现在讲过的变换中,形式最为一般的。从真实世界到相机照片的变换可以看成一个射影变换。读者可以想象一个原本方形的地板砖,在照片中是什么样子:首先,它不再是方形的。由于近大远小的关系,它甚至不是平行四边形,而是一个不规则的四边形。
从真实世界倒相机照片的变换是一个射影变换。如果相机的焦距为无穷远,那么这个变换为仿射变换。
概念
透视变换 是指利用透视中心、像点、目标点 三点共线的条件,按透视旋转定律使承影面(透视面)绕迹线(透视轴)旋转某一角度,破坏原有的投影光线束,仍能保持承影面上投影几何图形不变的变换。简而言之,就是将一个平面通过一个投影矩阵投影到指定平面上。

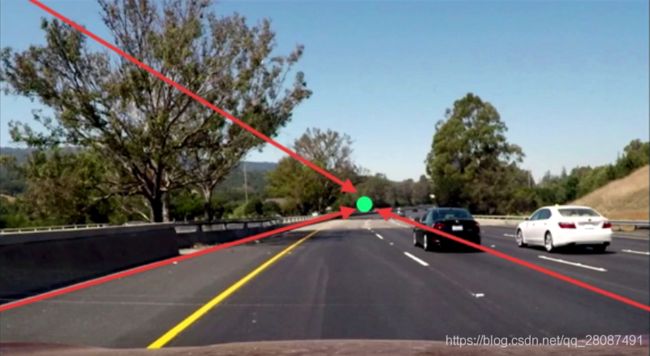
透视是图像中的一种现象,物体距离观察点(例如镜头)越远,看起来就越小,平行的直线在最远处似乎汇聚到同一个点上(vanishing point)。
从数学的角度,我们可以这样描绘透视,在现实世界的 x , y , z x,y,z x,y,z 坐标系中,物体 z z z 坐标值越大,或其与相机的距离越大,它在二维图像中就显得越小。
本质上而言,透视变换改变了对象点的表观 z z z 坐标,从而改变了该对象的二维图像表示,透视变换扭曲了图像,并有效地将物体推近或推离镜头,以改变表观视角。
例如,我们可以使用透视变换来放大距离较远的物体,这种变换非常有用,因为某些任务,例如计算车道线的曲率,通过图像的鸟瞰图视角要更容易进行。

进行透视变换,需要选择四个点:这些点定义了一个长方形,位于这幅图像的同一平面,四个点就足以确定从一种视角到另一种视角的线性变换了+四个点在变换后出现的位置,变换后的图像被称为扭转图像(wraped image)。
OpenCV 实现
-
首先在源图像和扭转的目标图像中分别手动创建四个点,这些点可定义透视变换。
-
透视变换通过一个映射矩阵表示,由
getPerspectiveTransform函数返回,这个函数接收四个源图像点坐标以及对应的目标图像点坐标,并返回透视变换的映射矩阵。还可以用反向透视变换回复这个图像----只需在这个函数中对调源图像点和目标图像点即可。
M = cv2.getPerspectiveTransform(src, dst)
Minv = cv2.getPerspectiveTransform(dst, src)
- 接下来,只需对原始图像使用变换矩阵 M M M 就能得到变换后的扭转图像。这一步调用
wrapPerspective函数来进行。 这个函数的输入包括源图像、透视矩阵 M M M 以及想得到的扭转图像的尺寸,此外,扭曲视角还需考虑,如何内插和填充在扭转图像过程中丢失的点
warped = cv2.warpPerspective(img, M, img_size, flags=cv2.INTER_LINEAR)