滑动轨迹 曲线 python_无人驾驶路径规划技术-三次样条插值曲线及Python代码实现...
自动驾驶运动规划(Motion Planning)是无人驾驶汽车的核心模块之一,它的主要任务之一就是如何生成舒适的、碰撞避免的行驶路径和舒适的运动速度。生成行驶路径最经典方法之一就是是Sampling-Based Planner算法;基于采样的规划器可以规划出可行的轨迹,但这种轨迹往往是折线,为了保证车辆行驶过程中给乘客良好舒适的体验,需要对规划的轨迹进行平滑。Cubic Spline就是一种常用的插值平滑算法,通过一系列的控制点得到一条连续平滑的轨迹。
1、Cubic Spline曲线定义
假定有以下n+1个节点:
把n+1个节点划分成n个区间:
,Cubic Spline是一个满足以下条件的分段定义曲线:
1)在每个分段区间
上,
是一个三次多项式;
2)
;
3)S(x)、
、
在区间[a, b]上连续,即S(x)曲线是光滑的;
每个分段区间的三次多项式构造形式如下:
n个区间共有n个多项式,每个多项式有
,
,
,
4个未知数,所以整个三次样条曲线(Cubic Spline)共有4n个未知数。要求解4n个未知数,需要构造4n个方程。
2、Cubic Spline曲线求解
已知:
a) n+1个数据点[
,
], i = 0, 1, …, n;
b) 每一分段都是三次多项式函数曲线;
c) 节点达到二阶连续;
d) 左右两端点处特性(自然边界,固定边界,非节点边界)
根据已知点求出每段样条曲线方程中的系数,即可得到曲线方程。
曲线求解过程的推导的过程如下:
1)根据插值和连续性的定义:
其中i = 0, 1, ..., n-1
2)根据微分连续性的定义:
其中i = 0, 1, ..., n-2
3)样条曲线的微分式:
a) 由
可以得到:
b) 令
,由
得到:
c) 由
推出:
由此可得:
d) 由
推出:
设
,则有:
a.
可写为:
推出:
b. 将
,
代入
可得:
c. 将
,
,
代入
可得:
根据上述的公式可以得到4n-2个方程,然而有4n个未知数,所以还需要对边界做些约束,所以需要对两端点
和
的微分加些限制。 选择不是唯一的,3种比较常用的限制如下。
a. 自由边界(Natural)
首尾两端没有受到任何让它们弯曲的力,即
,具体表示为
和
,则要求解的方程组可写为:
b. 固定边界(Clamped)
将上述两个公式代入方程组,新的方程组左侧为:
c.非节点边界(Not-A-Knot)
指定样条曲线的三次微分相等,即:
根据
和
,则上述条件变为:
新的方程组系数矩阵可写为:
下图可以看出不同的端点边界对样条曲线的影响:
3、算法总结
假设有n+1个数据节点:
,曲线插值的步骤如下:
a) 计算步长:
,其中i = 0, 1, ..., n-1;
b) 将数据节点和指定的首尾断点条件代入矩阵方程;
c) 解矩阵方程,求得二次微分方程
,该矩阵为三对角矩阵;常见解法为高斯消元法,可以对系数矩阵进行LU分解,分解为单位下三角矩阵和上三角矩阵。即:
d) 计算样条曲线的系数:
其中i=0,1,...,n-1
e. 在每个子区间
中,创建方程:
4、举例
以y=sin(x)为例, x步长为1,x取值范围是[0,10]。对它使用三次样条插值,插值前后对比如下:
5、Python代码实现
三阶样条曲线拟合代码如下:
#! /usr/bin/python
# -*- coding: utf-8 -*-
u"""
Cubic Spline library
author Atsushi Sakai
license: MIT
"""
import math
import numpy as np
class Spline:
u"""
Cubic Spline class
usage:
spline=Spline(x,y)
rx=np.arange(0,4,0.1)
ry=[spline.calc(i) for i in rx]
"""
def __init__(self, x, y):
self.b, self.c, self.d, self.w = [], [], [], []
self.x = x
self.y = y
self.nx = len(x) # dimension of x
h = np.diff(x)
# calc coefficient c
self.a = [iy for iy in y]
# calc coefficient c
A = self.__calc__A(h)
B = self.__calc__B(h)
self.c = np.linalg.solve(A, B)
# print(self.c1)
# calc spline coefficient b and d
for i in range(self.nx - 1):
self.d.append((self.c[i + 1] - self.c[i]) / (3.0 * h[i]))
tb = (self.a[i + 1] - self.a[i]) / h[i] - h[i] * (self.c[i + 1] + 2.0 * self.c[i]) / 3.0
self.b.append(tb)
def calc(self, t):
u"""
Calc position
if t is outside of the input x, return None
"""
if t < self.x[0]:
return None
elif t > self.x[-1]:
return None
i = self.__search_index(t)
dx = t - self.x[i]
result = self.a[i] + self.b[i] * dx + self.c[i] * dx ** 2.0 + self.d[i] * dx ** 3.0
return result
def __search_index(self, x):
u"""
search data segment index
"""
for i in range(self.nx):
if self.x[i] - x > 0:
return i - 1
def __calc__A(self, h):
u"""
calc matrix A for spline coefficient c
"""
A = np.zeros((self.nx, self.nx))
A[0, 0] = 1.0
for i in range(self.nx - 1):
if i is not self.nx - 2:
A[i + 1, i + 1] = 2.0 * (h[i] + h[i + 1])
A[i + 1, i] = h[i]
A[i, i + 1] = h[i]
A[0, 1] = 0.0
A[self.nx - 1, self.nx - 2] = 0.0
A[self.nx - 1, self.nx - 1] = 1.0
return A
def __calc__B(self, h):
u"""
calc matrix B for spline coefficient c
"""
B = np.zeros(self.nx)
for i in range(self.nx - 2):
B[i + 1] = 3.0 * (self.a[i + 2] - self.a[i + 1]) / h[i + 1] - 3.0 * (self.a[i + 1] - self.a[i]) / h[i]
return B
使用上述代码将点集拟合成曲线:
def test1():
import matplotlib.pyplot as plt
# input
x = [-2.5, 0.0, 2.5, 5.0, 7.5]
y = [0.7, -6, 5, 6.5, 0.0]
# 3d spline interporation
spline = Spline(x, y)
rx = np.arange(-2.5, 7.5, 0.01)
ry = [spline.calc(i) for i in rx]
plt.plot(x, y, "xb")
plt.plot(rx, ry, "-r")
plt.grid(True)
plt.axis("equal")
plt.show()
if __name__ == '__main__':
test1()
拟合效果如下:
注:本文首发于微信公众号,转载请注明出处,谢谢!公众号:半杯茶的小酒杯
个人博客地址:http://www.banbeichadexiaojiubei.comwww.banbeichadexiaojiubei.com
参考链接
如需代码请到公众号:【半杯茶的小酒杯】回复"Cubic-Spline-Python20200127"获取。
相关文章半杯茶的小酒杯:未知环境下的Lidar概率占位栅格图(Occupancy Grid Map) Python代码实现zhuanlan.zhihu.com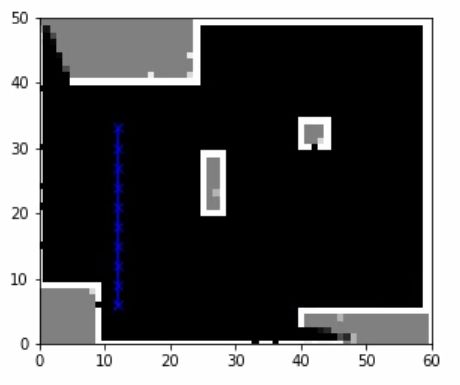 半杯茶的小酒杯:自动驾驶Mapping-占位栅格图(Occupancy Grid Map)zhuanlan.zhihu.com
半杯茶的小酒杯:自动驾驶Mapping-占位栅格图(Occupancy Grid Map)zhuanlan.zhihu.com 半杯茶的小酒杯:自动驾驶中的车辆运动学模型zhuanlan.zhihu.com
半杯茶的小酒杯:自动驾驶中的车辆运动学模型zhuanlan.zhihu.com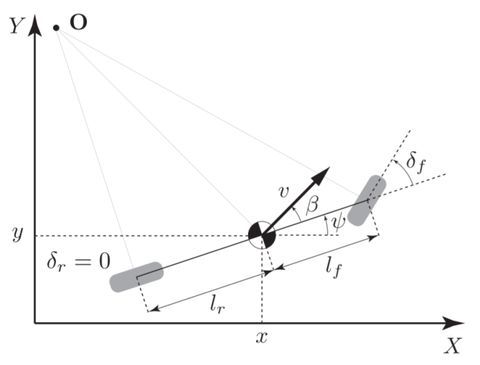 半杯茶的小酒杯:自动驾驶定位算法(十五)基于多传感器融合的状态估计(muti-Sensors Fusion)zhuanlan.zhihu.com
半杯茶的小酒杯:自动驾驶定位算法(十五)基于多传感器融合的状态估计(muti-Sensors Fusion)zhuanlan.zhihu.com 自动驾驶路径规划器-Lattice Planner详解www.banbeichadexiaojiubei.com半杯茶的小酒杯:自动驾驶定位算法(十四)-递归贝叶斯滤波(Bayes Filter)zhuanlan.zhihu.com
自动驾驶路径规划器-Lattice Planner详解www.banbeichadexiaojiubei.com半杯茶的小酒杯:自动驾驶定位算法(十四)-递归贝叶斯滤波(Bayes Filter)zhuanlan.zhihu.com 半杯茶的小酒杯:自动驾驶定位算法(十三)-粒子滤波(Particle Filter)zhuanlan.zhihu.com
半杯茶的小酒杯:自动驾驶定位算法(十三)-粒子滤波(Particle Filter)zhuanlan.zhihu.com 半杯茶的小酒杯:自动驾驶硬件系统(十二)-激光雷达(Lidar)测量模型zhuanlan.zhihu.com
半杯茶的小酒杯:自动驾驶硬件系统(十二)-激光雷达(Lidar)测量模型zhuanlan.zhihu.com 半杯茶的小酒杯:自动驾驶硬件(十一)-Global Navigation Satellite System-GNSSzhuanlan.zhihu.com
半杯茶的小酒杯:自动驾驶硬件(十一)-Global Navigation Satellite System-GNSSzhuanlan.zhihu.com 自动驾驶定位算法(九)-直方图滤波(Histogram Filter)定位www.banbeichadexiaojiubei.com
自动驾驶定位算法(九)-直方图滤波(Histogram Filter)定位www.banbeichadexiaojiubei.com