迁移学习+pytorch实战项目
迁移学习+图像识别项目实战
- 迁移学习
-
- 背景
- 基于共享权重的迁移学习
- 实战102种花的图像识别识别
迁移学习
背景
在2016年的神经信息处理系统大会(NIPS)上,前百度首席科学家、斯坦福教授、机器学习四大天王之一的吴恩达表示:“在监督学习之后,迁移学习将引领下一波机器学习技术商业化浪潮。”在接下来的时间,确实迁移学习掀起了一波热潮。
有需求才会被发展,那么迁移学习的能解决什么问题呢?希望读者读完这篇博客可以自己感悟分享。
基于共享权重的迁移学习
迁移学习的方法主要有三种:基于实例的迁移,基于特征的迁移,和基于共享参数的迁移,在这里,我们只讨论基于共享参数的迁移学习。
我们简单从字面理解,基于共享参数的迁移,就是把别人已经训练好的模型参数,拿过来用,**例如:我们有一个训练识别猫的模型,那么我们是不是可以用我这个训练猫的模型权重用在识别狗的模型呢?**当然,我们能迁移过来的那个模型,一定在源目标识别中表现在得很棒。那我们拿过来模型权重过来,应该怎么训练呢?下面介绍的就是两种训练模式。
- 预训练模式
这种训练模式就是将原来的权重是做新网络的初始化的权重,但是他在训练的过程中会被算法改变数值。 - 固定权重模式
在这种模式下,迁移过来的部分网络在结构和权重上都保持固定的数值不会改变,训练过程仅针对迁移学习模块后面的全连接网络。
至于选择哪一种的训练模式,当然是看应用场景,大家可能会觉得预训练模型具有足够的灵活性,肯定这种模式比较棒,其实不一定,说白点就是主要看数据量,迁移学习解决了深度学习需要大数据量的问题,当数据量太小的时候,很大可能是固定训练模式得到准确率高,那么,数据量越大,使用预训练模式就会越棒。
实战102种花的图像识别识别
经典的图像识别网络有很多,我们迁移resnet18层的神经网络。并且在此项目中,我们只采用预训练的模式进行训练,这个项目为了找出最好的权重,首先是将resnet作为初始化权重进行训练,在训练20个周期后,保存下当时的模型权重,再利用这个权重初始化训练9个周期,当然,再去硬件允许下,跑多一点周期,结果肯定会更加好。使用CPU的可以考虑降低周期。
需要的数据下方评论
#导入相关模块
import os
import matplotlib.pyplot as plt
%matplotlib inline
import numpy as np
import torch
from torch import nn
import torch.optim as optim
import torchvision
from torchvision import transforms, models, datasets
import imageio
import time
import warnings
import random
import sys
import copy
import json
from PIL import Image
在做视觉的时候,对图像进行增强是必不可少的(图像增强就是对图片做旋转、翻转等等),在pytorch中,有一个模块torchvision是非常棒的,它主要分为三个部分,第一是经典模型,第二是图像增强操作,第三是数据集,我们可以直接使用增强代码进行处理。
#数据读取和预处理
data_dir = './flower_data/'
train_dir = data_dir + '/train'
valid_dir = data_dir + '/valid'
data_transforms = {
'train': transforms.Compose([transforms.RandomRotation(45),#随机旋转,-45到45度之间随机选
transforms.CenterCrop(224),#从中心开始裁剪
transforms.RandomHorizontalFlip(p=0.5),#随机水平翻转 选择一个概率概率
transforms.RandomVerticalFlip(p=0.5),#随机垂直翻转
transforms.ColorJitter(brightness=0.2, contrast=0.1, saturation=0.1, hue=0.1),#参数1为亮度,参数2为对比度,参数3为饱和度,参数4为色相
transforms.RandomGrayscale(p=0.025),#概率转换成灰度率,3通道就是R=G=B
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])#均值,标准差
]),
'valid': transforms.Compose([transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
]),
}
batch_size = 8
image_datasets = {x: datasets.ImageFolder(os.path.join(data_dir, x), data_transforms[x]) for x in ['train', 'valid']}
dataloaders = {x: torch.utils.data.DataLoader(image_datasets[x], batch_size=batch_size, shuffle=True) for x in ['train', 'valid']}
dataset_sizes = {x: len(image_datasets[x]) for x in ['train', 'valid']}
class_names = image_datasets['train'].classes
在上述代码要注意以下问题:
1.在大多迁移学习网络输入图片的大小是224*224的,无论是VGG,还是resnet。
2.我们想要迁移别的模型在自己的数据集表现更好,我们应该和原模型做的数据预处理保持一致,上面对图像的标准化就是resnet处理图像标准化的方法。
### 读取标签对应的实际名字
with open('cat_to_name.json', 'r') as f:
cat_to_name = json.load(f)
cat_to_name
### 展示下数据
- 注意tensor的数据需要转换成numpy的格式,而且还需要还原回标准化的结果
def im_convert(tensor):
""" 展示数据"""
image = tensor.to("cpu").clone().detach()
image = image.numpy().squeeze()
image = image.transpose(1,2,0)
image = image * np.array((0.229, 0.224, 0.225)) + np.array((0.485, 0.456, 0.406))
image = image.clip(0, 1)
return image
fig=plt.figure(figsize=(20, 12))
columns = 4
rows = 2
dataiter = iter(dataloaders['valid'])
inputs, classes = dataiter.next()
for idx in range (columns*rows):
ax = fig.add_subplot(rows, columns, idx+1, xticks=[], yticks=[])
ax.set_title(cat_to_name[str(int(class_names[classes[idx]]))])
plt.imshow(im_convert(inputs[idx]))
plt.show()
可以得到展示的图片:

def initialize_model(model_name, num_classes, feature_extract, use_pretrained=True):
# 选择合适的模型,不同模型的初始化方法稍微有点区别
model_ft = None
input_size = 0
if model_name == "resnet":
""" Resnet18
"""
model_ft = models.resnet18(pretrained=use_pretrained)
set_parameter_requires_grad(model_ft, feature_extract)
num_ftrs = model_ft.fc.in_features
model_ft.fc = nn.Sequential(nn.Linear(num_ftrs, 102),
nn.LogSoftmax(dim=1))
input_size = 224
initialize_model函数对于想要使用别的经典网络是非常方便的,但是要留意这个函数是已经重新设置了模型的全连接层,并且输出的不是Softmax,而是LogSoftmax,可以理解为就是在Softmax做了log计算。
### 设置哪些层需要训练
model_ft, input_size = initialize_model(model_name, 102, feature_extract, use_pretrained=True)
#GPU计算
model_ft = model_ft.to(device)
# 模型保存
filename='checkpoint.pth'
# 是否训练所有层
params_to_update = model_ft.parameters()
print("Params to learn:")
if feature_extract:
params_to_update = []
for name,param in model_ft.named_parameters():
if param.requires_grad == True:
params_to_update.append(param)
print("\t",name)
else:
for name,param in model_ft.named_parameters():
if param.requires_grad == True:
print("\t",name)
model_ft
### 优化器设置
# 优化器设置
optimizer_ft = optim.Adam(params_to_update, lr=1e-2)
scheduler = optim.lr_scheduler.StepLR(optimizer_ft, step_size=7, gamma=0.1)#学习率每7个epoch衰减成原来的1/10
#最后一层已经LogSoftmax()了,所以不能nn.CrossEntropyLoss()来计算了,nn.CrossEntropyLoss()相当于logSoftmax()和nn.NLLLoss()整合
criterion = nn.NLLLoss()
### 训练模块
def train_model(model, dataloaders, criterion, optimizer, num_epochs=25, is_inception=False,filename=filename):
since = time.time()
best_acc = 0
"""
checkpoint = torch.load(filename)
best_acc = checkpoint['best_acc']
model.load_state_dict(checkpoint['state_dict'])
optimizer.load_state_dict(checkpoint['optimizer'])
model.class_to_idx = checkpoint['mapping']
"""
model.to(device)
val_acc_history = []
train_acc_history = []
train_losses = []
valid_losses = []
LRs = [optimizer.param_groups[0]['lr']]
best_model_wts = copy.deepcopy(model.state_dict())
for epoch in range(num_epochs):
print('Epoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
# 训练和验证
for phase in ['train', 'valid']:
if phase == 'train':
model.train() # 训练
else:
model.eval() # 验证
running_loss = 0.0
running_corrects = 0
# 把数据都取个遍
for inputs, labels in dataloaders[phase]:
inputs = inputs.to(device)
labels = labels.to(device)
# 清零
optimizer.zero_grad()
# 只有训练的时候计算和更新梯度
with torch.set_grad_enabled(phase == 'train'):
if is_inception and phase == 'train':
outputs, aux_outputs = model(inputs)
loss1 = criterion(outputs, labels)
loss2 = criterion(aux_outputs, labels)
loss = loss1 + 0.4*loss2
else:#resnet执行的是这里
outputs = model(inputs)
loss = criterion(outputs, labels)
_, preds = torch.max(outputs, 1)
# 训练阶段更新权重
if phase == 'train':
loss.backward()
optimizer.step()
# 计算损失
running_loss += loss.item() * inputs.size(0)
running_corrects += torch.sum(preds == labels.data)
epoch_loss = running_loss / len(dataloaders[phase].dataset)
epoch_acc = running_corrects.double() / len(dataloaders[phase].dataset)
time_elapsed = time.time() - since
print('Time elapsed {:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))
print('{} Loss: {:.4f} Acc: {:.4f}'.format(phase, epoch_loss, epoch_acc))
# 得到最好那次的模型
if phase == 'valid' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = copy.deepcopy(model.state_dict())
state = {
'state_dict': model.state_dict(),
'best_acc': best_acc,
'optimizer' : optimizer.state_dict(),
}
torch.save(state, filename)
if phase == 'valid':
val_acc_history.append(epoch_acc)
valid_losses.append(epoch_loss)
scheduler.step(epoch_loss)
if phase == 'train':
train_acc_history.append(epoch_acc)
train_losses.append(epoch_loss)
print('Optimizer learning rate : {:.7f}'.format(optimizer.param_groups[0]['lr']))
LRs.append(optimizer.param_groups[0]['lr'])
print()
time_elapsed = time.time() - since
print('Training complete in {:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))
print('Best val Acc: {:4f}'.format(best_acc))
# 训练完后用最好的一次当做模型最终的结果
model.load_state_dict(best_model_wts)
return model, val_acc_history, train_acc_history, valid_losses, train_losses, LRs
### 开始训练!
model_ft, val_acc_history, train_acc_history, valid_losses, train_losses, LRs = train_model(model_ft, dataloaders, criterion, optimizer_ft, num_epochs=20, is_inception=(model_name=="inception"))
注意上述代码:
1.上面代码的训练是只训练了全连接层,并没有改变resnet18的隐藏层的参数,所以模型的训练就稍微会快点,这种迁移的方式经常使用于数据集量比较少的。
2.为什么使用nn.NLLLoss()作为函数?
因为之前最后一层已经LogSoftmax()了,所以不能nn.CrossEntropyLoss()来计算了,nn.CrossEntropyLoss()相当于logSoftmax()和nn.NLLLoss()整合
**
在下面,我们再来看看训练所有层的效果和速度怎么样?

为了节省时间,所以只跑了10个Epoch,有条件将Epoch调成50个,效果肯定会更好。
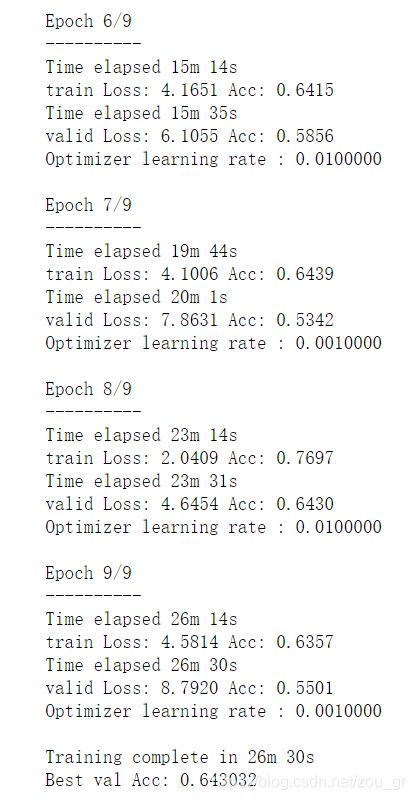
我们再来看看训练所有层的效果,并且我们保存了模型:
### 再继续训练所有层
for param in model_ft.parameters():
param.requires_grad = True #设置可以改变参数
# 再继续训练所有的参数,学习率调小一点
optimizer = optim.Adam(params_to_update, lr=1e-4)
scheduler = optim.lr_scheduler.StepLR(optimizer_ft, step_size=7, gamma=0.1)
# 损失函数
criterion = nn.NLLLoss()
# Load the checkpoint
checkpoint = torch.load(filename)
best_acc = checkpoint['best_acc'] #保存最好的准确率
model_ft.load_state_dict(checkpoint['state_dict']) #保存参数
optimizer.load_state_dict(checkpoint['optimizer']) #保存优化器
#model_ft.class_to_idx = checkpoint['mapping']
model_ft, val_acc_history, train_acc_history, valid_losses, train_losses, LRs = train_model(model_ft, dataloaders, criterion, optimizer, num_epochs=10, is_inception=(model_name=="inception"))
运行结果:



model_ft, input_size = initialize_model(model_name, 102, feature_extract, use_pretrained=True)
# GPU模式
model_ft = model_ft.to(device)
# 保存文件的名字
filename='checkpoint.pth'
# 加载模型
checkpoint = torch.load(filename)
best_acc = checkpoint['best_acc']
model_ft.load_state_dict(checkpoint['state_dict'])
# 测试数据预处理
def process_image(image_path):
# 读取测试数据
img = Image.open(image_path)
# Resize,thumbnail方法只能进行缩小,所以进行了判断
if img.size[0] > img.size[1]:
img.thumbnail((10000, 256))
else:
img.thumbnail((256, 10000))
# Crop操作
left_margin = (img.width-224)/2
bottom_margin = (img.height-224)/2
right_margin = left_margin + 224
top_margin = bottom_margin + 224
img = img.crop((left_margin, bottom_margin, right_margin,
top_margin))
# 相同的预处理方法
img = np.array(img)/255
mean = np.array([0.485, 0.456, 0.406]) #provided mean
std = np.array([0.229, 0.224, 0.225]) #provided std
img = (img - mean)/std
# 注意颜色通道应该放在第一个位置
img = img.transpose((2, 0, 1))
return img
def imshow(image, ax=None, title=None):
"""展示数据"""
if ax is None:
fig, ax = plt.subplots()
# 颜色通道还原
image = np.array(image).transpose((1, 2, 0))
# 预处理还原
mean = np.array([0.485, 0.456, 0.406])
std = np.array([0.229, 0.224, 0.225])
image = std * image + mean
image = np.clip(image, 0, 1)
ax.imshow(image)
ax.set_title(title)
return ax
#展示测试数据
fig=plt.figure(figsize=(20, 20))
columns =4
rows = 2
for idx in range (columns*rows):
ax = fig.add_subplot(rows, columns, idx+1, xticks=[], yticks=[])
plt.imshow(im_convert(images[idx]))
ax.set_title("{} ({})".format(cat_to_name[str(preds[idx])], cat_to_name[str(labels[idx].item())]),
color=("green" if cat_to_name[str(preds[idx])]==cat_to_name[str(labels[idx].item())] else "red"))
plt.show()