【机械】基于遗传算法实现机器人逆运动学优化附matlab代码
1 内容介绍
在分析以往逆解方法的基础上,提出了用遗传算法求解机器人运动学逆解的方法,给出了用于优化求解的适合度函数,并提出用二次编码法提高解的精度,计算机模拟证明,该方法能快速收敛于全局最优解,能给出机器人的可能解,并能计算冗余度机器人的逆解.
2 仿真代码
%__________________________________________________________________ _%
% Optimization Algorithms for Inverse Kinematics of Robots with MATLAB Source Code
% Developed in MATLAB R2016b %
% Author and programmer: Hazim Nasir Ghafil %
% %
% e-Mail: [email protected] %
% %
% kindly, cite the code as :
% Ghafil H.N., J?rmai K. (2021) Optimization Algorithms for Inverse
%Kinematics of Robots with MATLAB Source Code.
% In: J?rmai K., Voith K. (eds) Vehicle and Automotive Engineering 3. VAE 2020.
%Lecture Notes in Mechanical Engineering. Springer, Singapore.
%https://doi.org/10.1007/978-981-15-9529-5_40
function [DH] = Denavit(theta,alpha,a,d)
DH = [cosd(theta),-1*sind(theta)*cosd(alpha),sind(theta)*sind(alpha),a*cosd(theta);...
sind(theta),cosd(theta)*cosd(alpha),-1*cosd(theta)*sind(alpha),a*sind(theta);...
0,sind(alpha),cosd(alpha),d;...
0,0,0,1];
end
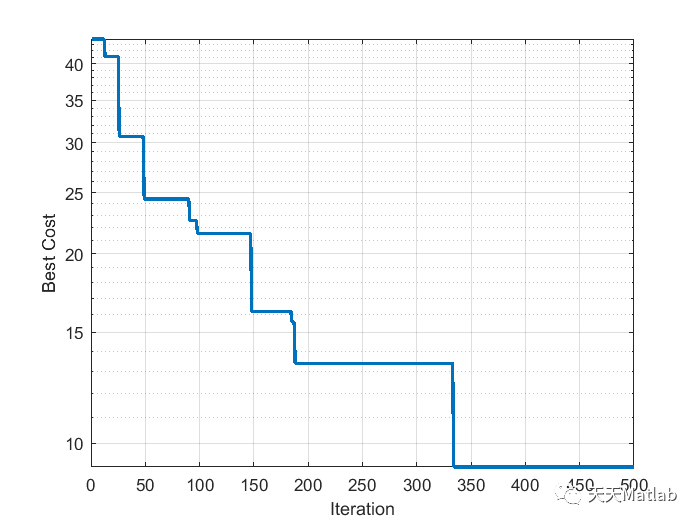
3 运行结果
4 参考文献
[1]刘永超, 黄玉美. 基于遗传算法的机器人运动学逆解[J]. 机器人, 1998, 20(6):6.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。