I2C总线式驱动开发
文章目录
- 前言
- 一、Linux内核对I2C总线的支持
-
- 1.1、理解I2C设备驱动、I2C总线驱动以及I2C核心之间的关系
- 1.2、i2c二级外设驱动开发涉及到核心结构体及其相关接口函数:
- 二、I2C总线二级外设驱动开发方法-名称匹配
-
- 2.1、i2c二级外设client框架:
- 2.2、i2c二级外设驱动框架
- 2.3、I2C总线二级外设驱动-名称匹配相关代码
- 三、I2C总线二级外设驱动开发方法-设备树匹配
-
- 3.1、I2C总线二级外设驱动-设备树匹配相关代码
前言
记录嵌入式驱动学习笔记一、Linux内核对I2C总线的支持
1.1、理解I2C设备驱动、I2C总线驱动以及I2C核心之间的关系
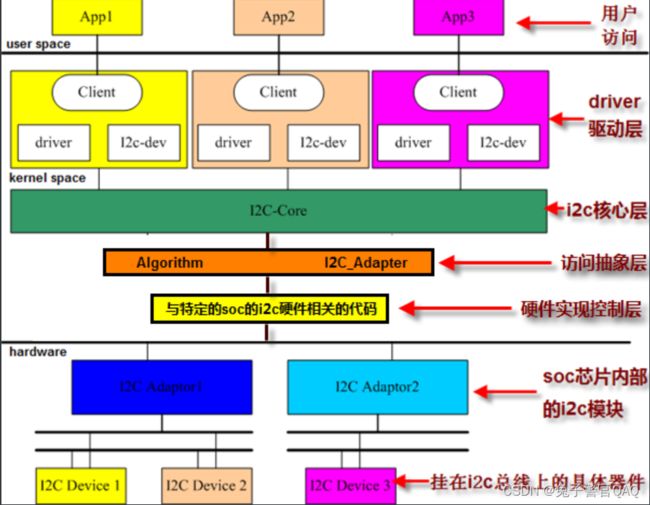
I2C设备驱动:
即挂接在I2C总线上的二级外设的驱动,也称客户(client)驱动,实现对二级外设的各种操作,二级外设的几乎所有操作全部依赖于对其自身内部寄存器的读写,对这些二级外设寄存器的读写又依赖于I2C总线的发送和接收。
I2C总线驱动:
即对I2C总线自身控制器的驱动,一般SOC芯片都会提供多个I2C总线控制器,每个I2C总线控制器提供一组I2C总线(SDA一根+SCL一根),每一组被称为一个I2C通道,Linux内核里将I2C总线控制器叫做适配器(adapter),适配器驱动主要工作就是提供通过本组I2C总线与二级外设进行数据传输的接口,每个二级外设驱动里必须能够获得其对应的adapter对象才能实现数据传输。
I2C核心:
承上启下,为I2C设备驱动和I2C总线驱动开发提供接口,为I2C设备驱动层提供管理多i2c_driver、i2c_client对象的数据结构,为I2C总线驱动层提供多个i2c_algorithm、i2c_adapter对象的数据结构。
1.2、i2c二级外设驱动开发涉及到核心结构体及其相关接口函数:
i2c二级外设驱动开发涉及到核心结构体及其相关接口函数:
struct i2c_board_info {
char type[I2C_NAME_SIZE];
unsigned short flags;
unsigned short addr;
void *platform_data;
struct dev_archdata *archdata;
struct device_node *of_node;
int irq;
};
/*用来协助创建i2c_client对象 相当于总线平台的devices
重要成员
type:用来初始化i2c_client结构中的name成员
flags:用来初始化i2c_client结构中的flags成员 置0表示7位的从设备地址
addr:用来初始化i2c_client结构中的addr成员 从设备地址
platform_data:用来初始化i2c_client结构中的.dev.platform_data成员
archdata:用来初始化i2c_client结构中的.dev.archdata成员
irq:用来初始化i2c_client结构中的irq成员
关键就是记住该结构和i2c_client结构成员的对应关系。在i2c子系统不直接创建i2c_client结构,只是提供struct i2c_board_info结构信息,让子系统动态创建,并且注册。
*/
struct i2c_client {
unsigned short flags;
unsigned short addr;
char name[I2C_NAME_SIZE];
struct i2c_adapter *adapter;
struct i2c_driver *driver;
struct device dev;
int irq;
struct list_head detected;
};
/*重要成员:
flags:地址长度,如是10位还是7位地址,默认是7位地址。如果是10位地址器件,则设置为I2C_CLIENT_TEN
addr:具体I2C器件如(at24c02),设备地址,低7位
name:设备名,用于和i2c_driver层匹配使用的,可以和平台模型中的平台设备层platform_driver中的name作用是一样的。
adapter:本设备所绑定的适配器结构(CPU有很多I2C适配器,类似单片机有串口1、串口2等等,在linux中每个适配器都用一个结构描述)
driver:指向匹配的i2c_driver结构,不需要自己填充,匹配上后内核会完成这个赋值操作
dev:内嵌的设备模型,可以使用其中的platform_data成员传递给任何数据给i2c_driver使用。
irq:设备需要使用到中断时,把中断编号传递给i2c_driver进行注册中断,如果没有就不需要填充。(有的I2C器件有中断引脚编号,与CPU相连)
*/
/* 获得/释放 i2c_adapter 路径:i2c-core.c linux-3.5\drivers\i2c */
/*功能:通过i2c总线编号获得内核中的i2c_adapter结构地址,然后用户可以使用这个结构地址就可以给i2c_client结构使用,从而实现i2c_client进行总线绑定,从而增加适配器引用计数。
返回值:
NULL:没有找到指定总线编号适配器结构
非NULL:指定nr的适配器结构内存地址*/
//从设备获取i2c通道 0~7一共8通道
struct i2c_adapter *i2c_get_adapter(int nr);
/*减少引用计数:当使用·i2c_get_adapter·后,需要使用该函数减少引用计数。(如果你的适配器驱动不需要卸载,可以不使用)*/
void i2c_put_adapter(struct i2c_adapter *adap);
/*
功能:根据参数adap,info,addr,addr_list动态创建i2c_client并且进行注册
参数:
adap:i2c_client所依附的适配器结构地址
info:i2c_client基本信息
addt_list: i2c_client的地址(地址定义形式是固定的,一般是定义一个数组,数组必须以I2C_CLIENT_END结束,示例:unsigned short ft5x0x_i2c[]={0x38,I2C_CLIENT_END};
probe:回调函数指针,当创建好i2c_client后,会调用该函数,一般没有什么特殊需求传递NULL。
返回值:
非NULL:创建成功,返回创建好的i2c_client结构地址
NULL:创建失败
*/
//在众多地址中找一个可以匹配上的 不清楚设备地址值时使用
struct i2c_client * i2c_new_probed_device
(
struct i2c_adapter *adap,
struct i2c_board_info *info,
unsigned short const *addr_list,
int (*probe)(struct i2c_adapter *, unsigned short addr)
);
/*示例:
struct i2c_adapter *ad;
struct i2c_board_info info={""};
unsigned short addr_list[]={0x38,0x39,I2C_CLIENT_END};
//假设设备挂在i2c-2总线上
ad=i2c_get_adapter(2);
//自己填充board_info
strcpy(inf.type,"xxxxx");
info.flags=0;
//动态创建i2c_client并且注册
//在众多地址中找一个可以匹配上的 不清楚设备地址值时使用
i2c_new_probed_device(ad,&info,addr_list,NULL);
i2c_put_adapter(ad);
*/
/*注销*/
void i2c_unregister_device(struct i2c_client *pclt)
//明确知道从设备地址值时使用该函数
struct i2c_client * i2c_new_device
(
struct i2c_adapter *padap,
struct i2c_board_info const *pinfo
);
/*示例:
struct i2c_adapter *ad;
struct i2c_board_info info={
I2C_BOARD_INFO(name,二级外设地址)
};
//假设设备挂在i2c-2总线上
ad=i2c_get_adapter(2);
//动态创建i2c_client并且注册
i2c_new_device(ad,&info);
i2c_put_adapter(ad);
*/
struct i2c_driver {
unsigned int class;
/* Standard driver model interfaces */
int (*probe)(struct i2c_client *, const struct i2c_device_id *);
int (*remove)(struct i2c_client *);
/* driver model interfaces that don't relate to enumeration */
void (*shutdown)(struct i2c_client *);
int (*suspend)(struct i2c_client *, pm_message_t mesg);
int (*resume)(struct i2c_client *);
void (*alert)(struct i2c_client *, unsigned int data);
/* a ioctl like command that can be used to perform specific functions
* with the device.
*/
int (*command)(struct i2c_client *client, unsigned int cmd, void *arg);
struct device_driver driver;
const struct i2c_device_id *id_table;
/* Device detection callback for automatic device creation */
int (*detect)(struct i2c_client *, struct i2c_board_info *);
const unsigned short *address_list;
struct list_head clients;
};
/*重要成员:
probe:在i2c_client与i2c_driver匹配后执行该函数
remove:在取消i2c_client与i2c_driver匹配绑定后后执行该函数
driver:这个成员类型在平台设备驱动层中也有,而且使用其中的name成员来实现平台设备匹配,但是i2c子系统中不使用其中的name进行匹配,这也是i2c设备驱动模型和平台设备模型匹配方法的一点区别
id_table:用来实现i2c_client与i2c_driver匹配绑定,当i2c_client中的name成员和i2c_driver中id_table中name成员相同的时候,就匹配上了。
补充:i2c_client与i2c_driver匹配问题
- i2c_client中的name成员和i2c_driver中id_table中name成员相同的时候
- i2c_client指定的信息在物理上真实存放对应的硬件,并且工作是正常的才会绑定上,并执行其中的probe接口函数这第二点要求和平台模型匹配有区别,平台模型不要求设备层指定信息在物理上真实存在就能匹配
*/
/*功能:向内核注册一个i2c_driver对象
返回值:0成功,负数 失败*/
#define i2c_add_driver(driver) i2c_register_driver(THIS_MODULE, driver)
int i2c_register_driver(struct module *owner, struct i2c_driver *driver);
/*功能:从内核注销一个i2c_driver对象
返回值:无 */
void i2c_del_driver(struct i2c_driver *driver);
struct i2c_msg {
__u16 addr; /* slave address */
__u16 flags;
#define I2C_M_TEN 0x0010 /* this is a ten bit chip address */
#define I2C_M_RD 0x0001 /* read data, from slave to master */
__u16 len; /* msg length */
__u8 *buf; /* pointer to msg data */
};
/* 重要成员:
addr:要读写的二级外设地址
flags:表示地址的长度,读写功能。如果是10位地址必须设置I2C_M_TEN,如果是读操作必须设置有I2C_M_RD······,可以使用或运算合成。
buf:要读写的数据指针。写操作:数据源 读操作:指定存放数据的缓存区
len:读写数据的数据长度
*/
/*i2c收发一体化函数,收还是发由参数msgs的成员flags决定*/
int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num)
/*
功能:根据msgs进行手法控制
参数:
adap:使用哪一个适配器发送信息,一般是取i2c_client结构中的adapter指针作为参数
msgs:具体发送消息指针,一般情况下是一个数组
num:表示前一个参数msgs数组有多少个消息要发送的
返回值:
负数:失败
> 0 表示成功发送i2c_msg数量
*/
/*I2C读取数据函数*/
int i2c_master_recv(const struct i2c_client *client, char *buf, int count)
/*功能:实现标准的I2C读时序,数据可以是N个数据,这个函数调用时候默认已经包含发送从机地址+读方向这一环节了
参数:
client:设备结构
buf:读取数据存放缓冲区
count:读取数据大小 不大于64k
返回值:
失败:负数
成功:成功读取的字节数
*/
/*I2C发送数据函数*/
int i2c_master_send(const struct i2c_client *client, const char *buf, int count)
/*功能:实现标准的I2C写时序,数据可以是N个数据,这个函数调用时候默认已经包含发送从机地址+写方向这一环节了
参数:
client:设备结构地址
buf:发送数据存放缓冲区
count:发送数据大小 不大于64k
返回值:
失败:负数
成功:成功发送的字节数
*/
二、I2C总线二级外设驱动开发方法-名称匹配
2.1、i2c二级外设client框架:
#include 2.2、i2c二级外设驱动框架
//其它struct file_operations函数实现原理同硬编驱动
static int mpu6050_probe(struct i2c_client *pclt,const struct i2c_device_id *pid)
{
//做硬编驱动模块入口函数的活
}
static int mpu6050_remove(struct i2c_client *pclt)
{
//做硬编驱动模块出口函数的活
}
//因为可以匹配多个所以是个数组
/*名称匹配时定义struct i2c_device_id数组*/
static struct i2c_device_id mpu6050_ids =
{
{"mpu6050",0},
//.....
{}
};
/*设备树匹配时定义struct of_device_id数组*/
static struct of_device_id mpu6050_dts =
{
{.compatible = "invensense,mpu6050"},
//....
{}
};
/*通过定义struct i2c_driver类型的全局变量来创建i2c_driver对象,同时对其主要成员进行初始化*/
struct i2c_driver mpu6050_driver =
{
.driver = {
.name = "mpu6050",
.owner = THIS_MODULE,
//设备树匹配
.of_match_table = mpu6050_dts,
},
.probe = mpu6050_probe,
.remove = mpu6050_remove,
//id匹配
.id_table = mpu6050_ids,
};
/*以下其实是个宏,展开后相当于实现了模块入口函数和模块出口函数*/
module_i2c_driver(mpu6050_driver);
MODULE_LICENSE("GPL");
2.3、I2C总线二级外设驱动-名称匹配相关代码
mpu6050.h
#ifndef MPU_6050_H
#define MPU_6050_H
struct accel_data
{
unsigned short x;
unsigned short y;
unsigned short z;
};
struct gyro_data
{
unsigned short x;
unsigned short y;
unsigned short z;
};
union mpu6050_data
{
struct accel_data accel;
struct gyro_data gyro;
unsigned short temp;
};
#define MPU6050_MAGIC 'K'
#define GET_ACCEL _IOR(MPU6050_MAGIC,0,union mpu6050_data)
#define GET_GYRO _IOR(MPU6050_MAGIC,1,union mpu6050_data)
#define GET_TEMP _IOR(MPU6050_MAGIC,2,union mpu6050_data)
#endif
mpu6050_client.c
#include mpu6050_drv.c
#include 三、I2C总线二级外设驱动开发方法-设备树匹配
3.1、I2C总线二级外设驱动-设备树匹配相关代码
向设备数添加i2c设备节点,.h文件与名称匹配中的.h文件相同
i2c@138B0000 {
#address-cells = <1>;
#size-cells = <0>;
samsung,i2c-sda-delay = <100>;
samsung,i2c-max-bus-ferq = <20000>;
pinctrl-0 = <&i2c5_bus>;
pinctrl-names = "default";
status = "okay";
mpu6050-3-asix@68 {
compatible = "invensense,mpu6050";
reg = <0x68>;
interrupt-parent = <&gpx3>;
interrupts = <3 2>;
};
};
mpu6050_drv.c
#include