嵌入式驱动初级-中断
文章目录
- 前言
- 一、Linux 中断 API 函数
- 二、Linux 中断实现
- 三、中断上半部与下半部
- 四、下半部机制之tasklet ---- 基于软中断
- 五、按键中断下半部机制之tasklet
- 六、下半部机制之workqueue ----- 基于内核线程
- 七、按键中断下半部机制之workqueue
前言
记录嵌入式驱动学习笔记一、Linux 中断 API 函数
设备树中增加按键节点
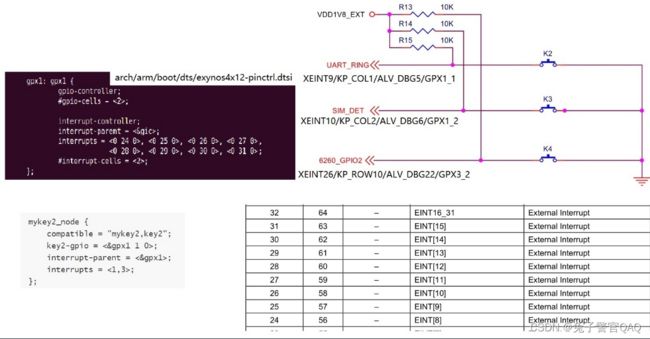
mykey2_node {
compatible = "mykey2,key2";
key2-gpio = <&gpx1 1 0>;
interrupt-parent = <&gpx1>;
interrupts = <1 3>;
};
驱动层
A.中断号:每个中断都有一个中断号,通过中断号即可区分不同的中断
B.从设备树获取中断号
unsigned int irq_of_parse_and_map(struct device_node *node, int index);
C.在 Linux 内核中要想使用某个中断是需要申请的,request_irq 函数用于申请中断
int request_irq(unsigned int irq, irq_handler_t handler, unsigned long flags,const char *name, void *dev)
D.中断处理函数:使用 request_irq 函数申请中断的时候需要设置中断处理函数
irqreturn_t (*irq_handler_t) (int, void *)
E.释放中断:void free_irq(unsigned int irq, void *dev_id);
unsigned int irq_of_parse_and_map(struct device_node *node, int index);
/*
功能:获得设备树中的中断号并进行映射
参数:node:设备节点
index:序号
返回值:成功:中断号 失败:错误码
*/
int request_irq(unsigned int irq, irq_handler_t handler, unsigned long flags,const char *name, void *dev)
/*
参数:
irq:所申请的中断号
handler:该中断号对应的中断处理函数
flags:中断触发方式或处理方式
触发方式:IRQF_TRIGGER_NONE //无触发
IRQF_TRIGGER_RISING //上升沿触发
IRQF_TRIGGER_FALLING //下降沿触发
IRQF_TRIGGER_HIGH //高电平触发
IRQF_TRIGGER_LOW //低电平触发
处理方式:
IRQF_DISABLED //用于快速中断,处理中屏蔽所有中断
IRQF_SHARED //共享中断
name:中断名 /proc/interrupts
dev:传递给中断例程的参数,共享中断时用于区分那个设备,一般为对应设备的结构体地址,无共享中断时写NULL
返回值:成功:0 失败:错误码
*/
typedef irqreturn_t (*irq_handler_t)(int, void *);
/*
参数:
int:中断号
void*:对应的申请中断时的dev_id
返回值:
typedef enum irqreturn irqreturn_t; //中断返回值类型
enum irqreturn {
IRQ_NONE = (0 << 0),
IRQ_HANDLED = (1 << 0),
IRQ_WAKE_THREAD = (1 << 1),
};
返回IRQ_HANDLED表示处理完了,返回IRQ_NONE在共享中断表示不处理
*/
void free_irq(unsigned int irq, void *dev_id);
/*
功能:释放中断号
参数:
irq:设备号
dev_id:共享中断时用于区分那个设备一般强转成设备号,无共享中断时写NULL
*/
二、Linux 中断实现
驱动层按键中断代码实现
#include 按键中断应用层代码实现
#include 三、中断上半部与下半部
Linux 内核将中断分为上半部和下半部的主要目的就是实现中断处理函数的快进快出,那些对时间敏感、执行速度快的操作可以放到中断处理函数中,也就是上半部。剩下的所有工作都可以放到下半部去执行,比如在上半部将数据拷贝到内存中,关于数据的具体处理就可以放到下半部去执行。
1.如果要处理的内容不希望被其他中断打断,那么可以放到上半部。
2.如果要处理的任务对时间敏感,可以放到上半部。
3.如果要处理的任务与硬件有关,可以放到上半部
上半部处理很简单,直接编写中断处理函数就行了,关键是下半部该怎么做呢?Linux 内核提供了多种下半部机制。
1.软中断
2.tasklet
3.工作队列
任务机制
workqueue ----- 内核线程 能睡眠 运行时间无限制
异常机制 ------- 不能睡眠 下半部执行时间不宜太长( < 1s)
软中断 ---- 接口不方便
tasklet ----- 无具体延后时间要求时
定时器 -----有具体延后时间要求时
四、下半部机制之tasklet ---- 基于软中断
驱动层
A.定义 taselet
struct tasklet_struct testtasklet;
B.tasklet 处理函数
void testtasklet_func(unsigned long data)
C.中断处理函数中调度 tasklet
tasklet_schedule(&testtasklet);
D. 驱动入口函数中初始化 tasklet
tasklet_init(&testtasklet, testtasklet_func, data);
//初始化tasklet
void tasklet_init(struct tasklet_struct *t,void (*func)(unsigned long), unsigned long data)
//调度tasklet
void tasklet_schedule(struct tasklet_struct *t)
//参数:t:tasklet的结构体
五、按键中断下半部机制之tasklet
驱动层代码实现
#include 六、下半部机制之workqueue ----- 基于内核线程
工作队列是另外一种下半部执行方式,工作队列在进程上下文执行,工作队列将要推后的工作交给一个内核线程去执行,因为工作队列工作在进程上下文,因此工作队列允许睡眠或重新调度。因此如果你要推后的工作可以睡眠那么就可以选择工作队列,否则的话就只能选择软中断或 tasklet。
驱动层API
A.定义一个 work_struct 结构体变量
struct work_struct testwork;
B.驱动入口函数中初始化 work
INIT_WORK(&testwork, testwork_func_t);
C.定义work 处理函数
void testwork_func_t(struct work_struct *work);
D. 中断处理函数中调度work 处理函数
schedule_work(&testwork);
//定义work_struct 结构体变量
struct work_struct work_queue;
//初始化工作队列
INIT_WORK(struct work_struct * pwork, _func);
//参数:pwork:工作队列
//func:工作队列的底半部处理函数
//定义工作队列底半部处理函数
void work_queue_func(struct work_struct *work);
//工作队列的调度函数
bool schedule_work(struct work_struct *work);
七、按键中断下半部机制之workqueue
驱动层代码实现
#include