Lidar based off-road negative obstacle detection and analysis(论文翻译)
(机翻 自己留作资料的 大家辩证使用 论文地址:https://ieeexplore.ieee.org/document/6083105)
Abstract:
无人驾驶地面车辆 (UGV) 要想在越野地形中高速行驶,就必须实时分析和了解周围的地形:它必须知道它打算去哪里,哪里有危险,以及许多细节 地形的地形。 在避障、地形分类和路径规划方面已经进行了大量研究,但仍然很少有 UGV 系统能够准确地高速自主穿越越野环境。 在越野中发现的最危险的危险之一是负障碍物,主要是因为它们很难被发现。 我们提出了使用 3D 激光测距仪生成的点云分析地形的算法,然后尝试使用我们称为负障碍物检测器 (NODR) 的基于几何的方法以及支持向量机对负障碍物进行分类。 支持向量机)算法。 针对传感器安装在高处的大型 UGV 以及传感器安装在地面低处的小型 UGV 对地形进行了分析。
Introduction
无人驾驶车辆导航和避障在过去几年取得了重大突破,表明车辆可以在高度控制的沙漠和城市环境中无人干预地行驶,例如在国防高级研究计划局 (DARPA) 大挑战赛和 DARPA 中所证明的 城市挑战。此外,喷气推进实验室 (JPL) 已经表明,无人驾驶车辆“精神”和“机遇”可以在最严酷的越野环境火星上航行,尽管速度非常慢。然而,UGV 自主性一直难以融入崎岖的越野实时场景。 这种技术滞后在很大程度上是由于缺乏对无人驾驶地面车辆 (UGV) 的实时自主越野穿越性分析,包括远距离负障碍物检测。UGV 的军事应用,例如补给、伤员后送、监视和侦察,必须适应基于美军当前参与的作战区域的越野地形。准确表示越野地形并对其进行实时分析是大多数 UGV 机器人系统面临的挑战,而且大多数 UGV 在相对平坦的地形上以低速行驶。SSC Pacific [1] 最近发布的一份关于无人驾驶汽车在陆战队员中的机动性的报告对当前的机器人技术进行了调查和分析,并得出结论认为每个系统都存在重大弱点,尤其是在面对危险地形时的机动性方面。该报告还指出,北约的重要差距是“在几乎所有天气条件下都以战术行为在所有地形上移动”。 在美军目前正在作战的世界地区完成那些更高的任务导向任务之前,需要在自主障碍物检测和避免方面做出重大改进,检测负面障碍物是解决问题的一个重要方面 需要解决。
Related Research
负障碍物很难检测到,尤其是在远距离时,但使用的方法包括搜索太陡的负斜坡或数据中超过距离阈值的间隙,然后是海拔下降或陡峭的上坡 [2],[ 3]、[4]。 JPL 使用柱检测器检测超过宽度和高度阈值的间隙,并使用区域大小过滤器来消除太短的负障碍物,以及单向高差检测器。在 [5]、[6] 中,光线追踪是从激光的当前位置执行的,并且在检测负障碍物时考虑来自地面或正障碍物的遮挡的基于上下文的标记。 JPL 还提出了一种利用热特征进行夜间检测的负障碍物检测新方法 [7]。
其他方法包括使用航拍图像和激光雷达数据,这些数据已被证明 [8] 也可以进行负障碍物检测,可以检测负障碍物的底部,从地面机器人的角度来看并不总是如此。
这项工作对一般智能汽车公众有益,并且可以与 [9]、[10] 中描述的计算机视觉安全系统相结合。
Approach
A.Sensor and Platform Selection
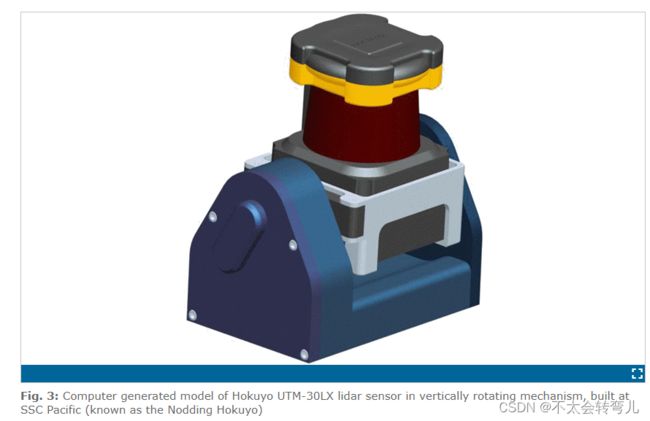
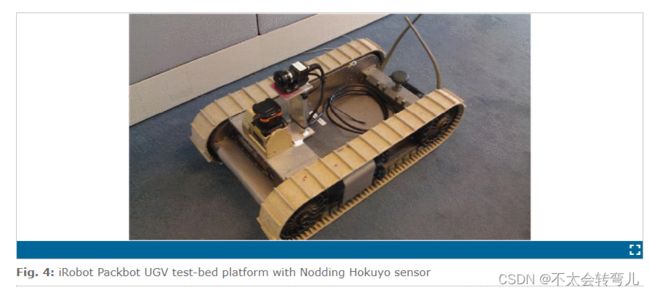
为这项研究开发的负障碍物检测方法和软件是为使用 3D 激光雷达的无人驾驶地面车辆设计的。 进行这项研究是为了适应大型和小型无人驾驶地面车辆平台,使用大型和小型 3D 激光雷达。预期的大型平台是 Max ATV(图 2)。 六轮滑移全地形车,长2.6m,宽1.5m,含防倾杆高1.7m。大型UGV平台上使用的3D激光雷达是Velodyne HDL-64E。 该激光雷达系统以 80% 的反射率提供 120 米距离的范围和强度读数,以 10Hz 的速率提供 100,000 个数据点以及 360 度水平视野和 26.8 度垂直视野。SSC Pacific 通过检测 40 米外的龙虾陷阱和 65 米外的部分淹没的黑色岩石,证明了该传感器在水面上的准确性 [11]。较小的地面车辆平台是长 89 厘米、宽 52 厘米和高 18 厘米的 iRobot Packbot(图 4),安装有 Hokuyo UTM-30LX 激光雷达传感器,设置在一个垂直上下倾斜的机构中以进行全 3D 扫描 ,我们称之为 Nodding Hokuyo(图 3)。Nodding Hokuyo 水平扫描 270 度,并且可以足够慢地旋转以具有 2.5 度的垂直角分辨率,俯仰从 -90 度到 +90 度。


B. Negative Obstacles
负障碍物是具有陡峭负坡度的沟渠或地形,如果穿越这些障碍物会对车辆造成危险。 负障碍物对无人驾驶车辆的危害与地面障碍物一样危险,因为它们可能导致翻车、翻倒或高居中。负障碍物对无人驾驶车辆的危害与地面障碍物一样危险,因为它们可能导致翻车、翻倒或高居中。 通常大于车轮直径宽度的沟渠足以对车辆造成损坏。车辆可以以足够高的速度越过宽度较大的障碍物,但我们不会尝试在本文中提供导航技术,而只是提供检测方法。

** 1) Detection Range and Stopping Distance**
这些危险很难从近距离检测到,从远处几乎不可能检测到。 等式 1 基于小角度近似并参考 [7],说明了在范围 R 内检测负障碍物的难度,如图 5 所示。障碍物的宽度为w,H是传感器距地面的高度,h是传感器看到障碍物的深度,R是传感器到障碍物的距离。 求解 θ 的方程为

随着范围的增加,角度 θ 显着减小 (∼1/R^2),这使得随着范围的增加,负障碍物很难检测到。 然而,检测更远距离的负面障碍物是必不可少的,尤其是对于快速移动的 UGV。本文使用两种不同的方法来检测负面障碍物。 第一种方法使用支持向量机 (SVM),必须使用地面实况数据进行训练。由于传递给 SVM 的参数,预计 SVM 的正确分类范围会有限制。第二种方法称为 Negative Obstacle DetectoR (NODR),它使用多个过滤器并寻找上下文线索,因此它有可以扩大范围的好处。
从 [12] 可知,车辆的停止距离可以使用等式 2 确定。

其中μ为地面与车轮之间的静摩擦系数,越野行驶时常用值为0.65,g为重力加速度,值为9.8m/s2,Tr为总反应时间,常用值为0.25s , B 是我们实验中为安全起见的缓冲距离,取值为 2m。 v>3.2m/s 时,速度值成为主导项:对于 24kph 的速度,需要停止的距离为 7.2m; 对于 48kph 的速度,停止所需的距离为 19.4m。
2) NODR Classification Approach
由于检测负面障碍的困难,这种分类方法错误地倾向于慷慨地检测负面障碍,然后将它们标记为仅潜在的负面障碍。 只有当潜在障碍物靠近车辆时,才能收集到足够的数据,真正将其归类为真正的负面障碍物。 这种用于检测负障碍物的基于几何的方法称为负障碍物检测器 (NODR),如图 8 所示。
NODR 通过检测可能存在沟渠、悬崖或负斜坡的缺口、数据缺失对潜在的负障碍进行分类。 检测开始于从传感器向外追踪一束 3D 点,跟踪从最低垂直角度开始向最高角度开始的激光垂直对准的返回。该算法基于产生结构化结果的激光传感器,这样可以垂直对齐。 Hokuyo UTM-30LX 每次水平扫描最多返回 1080 个激光雷达光束,垂直旋转机制允许 Hokuyo 在前一次扫描上方或下方产生另一个水平扫描。 这很好地对准了激光雷达光束的垂直射线,无需任何修改。 然而,Velodyne HDL-64E 的输出需要稍微修改。 该传感器有 64 个垂直排列的激光器,但在底部 32 个激光器中每 1 个脉冲报告顶部 32 个激光器中有 3 个激光脉冲。 为了处理这种情况下的光线追踪,我们通过获取顶部 32 个激光器的平均 x、y 和 z 值并使用底部 32 个激光器的默认值,将顶部 32 个激光器的 3 个激光返回合并为一个返回 , 提供一束完整的 64 束激光。
NODR 方法中使用的第一步是搜索台阶(step search),即超出台阶阈值的海拔下降,延伸超出间隙距离。我们两个 UGV 的间隙gap阈值由会造成损坏或停止平台的孔的大小决定。 对于那些有轮子的车辆,通常是轮子直径的大小。 对于每侧有 3 个轮子的 Max ATV,以及像 iRobot Packbot 这样的履带式车辆,它是从前轮或胎面到重心的距离。注意:这两种地面车辆均未进行重心测量,使用的间隙阈值仅为模拟环境的估计值。
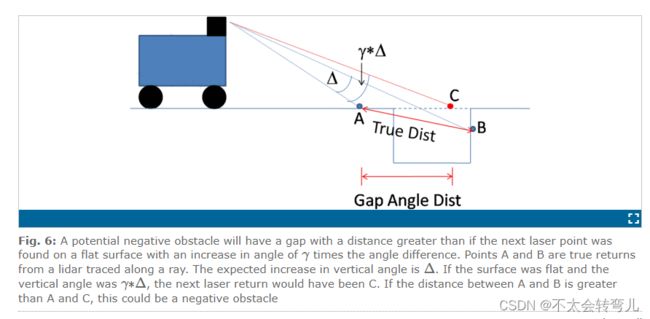
如果台阶(step)搜索未返回负障碍,则 NODR 会查找两点之间的数据间隙(gap)。 在追踪这些径向射线时,如果发现距离大于间隙阈值的间隙,则它会查看间隙角度。间隙角滤波器使用两次扫描之间垂直角分辨率的增加。 这里的阈值是如果下一个点与前一个点具有相同的海拔,并且垂直角度增加了 γ*Δ,其中 Δ 是水平扫描之间的垂直角分辨率,则预期的距离(图 6)。当 γ 的值为 1.5 时,测试提供了最佳结果。 请注意,这可能不是计算真正的负障碍物的最准确方法,但我们的算法试图保守以避免障碍物,并且正如公式 1 所强调的那样,负障碍物在远距离上极难检测到。 此外,如果间隙足够宽以通过这些距离过滤器,则该算法会寻找上下文线索。
要寻找的线索要么是海拔的显着下降,例如一个可能会出现的 如果坡度比我们的最大下降坡度阈值更陡(图 7a 和 7b),或者gap之后的数据具有明显的正坡度(图 7c), 如在沟渠的上坡。可以通过首先计算以下点的数量来确定沟渠上侧(背面)的坡度应该是背面坡度的一部分,确定它们的坡度,并确定该值的阈值。通过找到负障碍物的视角来计算点数。 在图 5 中,这是 θ。 对于不是那么远的范围 R,其中小角度近似不起作用并且方程 1 不能提供 θ 的精确测量,这个方程是 :

要使用的斜率点数为 num−points=θ/Δ,其中 Δ 是传感器的垂直角分辨率。只要 num-poinis 大于 1,我们就可以确定后坡。 当在由于垂直角分辨率小于θ而无法计算后坡的范围内检测到间隙时,它被简单地归类为潜在的负障碍物。
我们的研究得出结论,它不会增加 区分由真正的负面障碍造成的gap还是仅仅来自正面障碍的遮挡 的价值value。 无论如何,车辆都不应该穿过正面障碍物,并且处理潜在的负面障碍物是微不足道的,而检测正面障碍物并移除之后发现的潜在负面障碍物可以占用许多宝贵的处理时间的时钟周期。
NODR 的结果是两个激光点之间的矢量射线,可用于填充障碍物和地形特征的网格图。 我们在研究中采取的方法并不是完全避免这些检测到的障碍,因为在这一点上它们只是潜在的负面障碍。 它们仍然可能是可穿越的陡坡,但由于靠近车辆以及我们基于几何的方法的局限性,我们的传感器没有完整的信息。 在大多数情况下,车辆必须更接近实际将这些分类为真正的负面障碍。 我们提出的方法是当这些潜在的负面障碍物位于直接可导航路径中时减速,并在真正分类后避开它们。
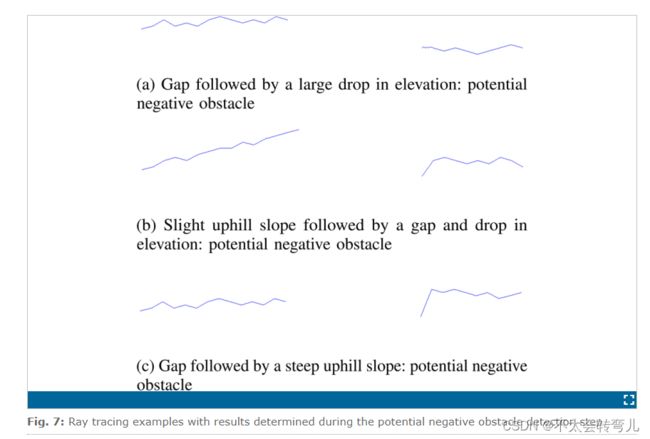
(a)海拔上有一个很大的下降后面的gap可能是一个潜在的负障碍物
(b)在一个轻微的上坡后面跟上一个海拔下降的gap可能是一个潜在的负障碍物。
(c)在gap后面有一个陡峭的上坡,可能是一个潜在的负障碍物
C. SVM Classification Approach
与 NODR 分类方法一样,支持向量机返回激光点之间的矢量射线,这些激光点被归类为潜在的负障碍物。 传递到 SVM 的参数包括从传感器到第一个点(一对两个垂直对齐的点)的范围、两个点之间的距离、两个点垂直角度的变化(好像第二个点有 与第一点相同的高程值)参考垂直角分辨率,以及两点的海拔差。 SVM 由负障碍物和非负障碍物的地面真值向量射线的许多样本进行训练,然后从测试用例中获取每对垂直对齐的点以确定其分类。

D. Real Negative Obstacle Classification
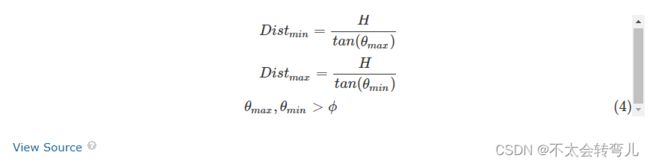
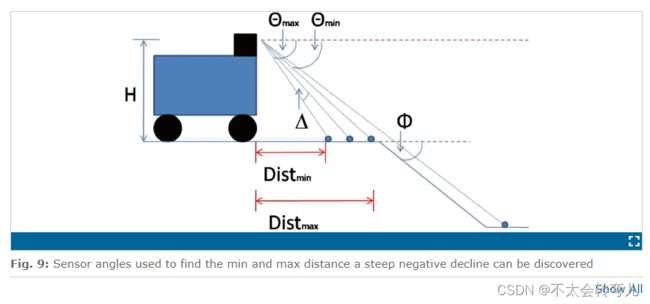
那些在狭窄值范围内的潜在负面障碍被提升为真正的负面障碍危险条件。 该范围是根据车辆可以穿越的最大负坡度和传感器的垂直角测量值计算得出的,如公式 4 和图 9 所示。例如,我们愿意让两辆车穿越的最大负坡度, φ, 是一个 20 度的下降。 根据传感器的最大负垂直角 θmax 和每次增加的水平扫描之间的角度 Δ,我们只能检测到 Distmin 和 Distmax 之间的陡峭下降。 对于 Max ATV(大车) 上的 Velodyne,这个范围在 4.76 米到 5.91 米之间。 在 Distmax 之后,激光雷达扫描与水平面的夹角小于 ϕ,实际上不会检测到斜率。 因此,那些在 Distmin 和 Distmax 之间开始的潜在负障碍物射线被认为是真正的负障碍物。 这是对真正的负面障碍物做出反应的非常短的距离,但是导航模块在接近它们时应该已经针对潜在的负面障碍物减速(速度应该足够慢以允许在障碍物之前停止距离,使用方程式 2).
Experimental Evaluation
检测方法遵循激光雷达光束的垂直对齐,并报告检测到负障碍物的两个光束之间的矢量射线。 对于模拟地形图中的每个负障碍物,都会有多个负障碍物射线。 因为每个地形都是通过模拟创建的,所以确切的位置和矢量射线是已知的,并被标记为地面实况。 如果检测方法发现一条射线与地面真值射线之一重叠,则将其视为正射线检测。 那些检测到的与地面真值射线不匹配的射线被认为是错误的射线检测。 如果对于负障碍物甚至存在一个正射线检测,则这被计为正障碍物检测。 本文报告了负障碍物射线检测和负障碍物检测的结果。
A. Setup of Simulated Environment
为了更好地分析负面障碍物及其各种表现形式,创建了多个模拟场景,其中充满了会导致机器人车辆损坏或停止的负面障碍物。 这些场景是通过首先构建地形的高度图来创建的,该地形具有任意数量的指定大小的负障碍物和正障碍物,以及地形其余部分的任意粗糙度值。 通过从高斯分布中随机选择高度值来设置粗糙度。为了模拟从地形返回的激光雷达,从传感器在高度图上的虚拟位置(取决于模拟平台的大小)创建矢量射线,并使用高度图相交算法来模拟激光雷达 来自传感器的脉冲。 这是通过确定激光雷达射线初始位置的 z 值何时在地形“上方”和“下方”之间切换,反之亦然; 在相同的 x, y 位置比较射线向量的 z 值和地形高度图的 z 值。 激光雷达射线穿过的 x、y 和 z 位置成为要添加到点云列表的 3D 点。 地形的模拟 3D 点云是通过遵循本研究中使用的小型和大型 3D 激光雷达传感器的水平和垂直角分辨率模式获得的(见图 10)。

B. Selecting of Test Cases
对于这个实验,模拟设置了适合其车辆平台的激光雷达高度
进行了四次实验,两次模拟小型激光雷达,两次模拟大型激光雷达,结合了光滑和崎岖地形,分离了 NODR 和 SVM 方法的结果。 所有的模拟地形都有负面障碍,有些还随机放置了正面障碍。
SVM 使用等量地面真值负障碍物光线和非负障碍物光线的多个样本高度图进行训练,然后使用新的模拟障碍物图进行测试。
C、Results of Experiments
表一显示了检测到的整体负障碍物射线和负障碍物的结果。 当在负障碍物内检测到一条负障碍物射线时,即检测到负障碍物。 每种方法的结果都是模拟粗糙地形和平滑地形的结果的组合。 实验范围描述了为该实验设置障碍物的范围。 SVM 实验在短距离内非常准确,对于更崎岖的地形甚至更短。 图 11 描绘了来自小型激光雷达的点云表示以及粗略测试用例的负障碍物检测图像。在短距离之外,SVM 方法不准确地将超出的每条光线识别为负障碍物,如图 12 所示。 我们的假设是负障碍开始小于垂直激光雷达脉冲之间的长度,SVM 无法收集足够的信息来做出正确的决定。

Conclusion
根据这些实验的结果,根据停车距离方程,小车可以行驶 2.5mJs,这是它的最大速度,在 O.5s 内处理数据(我们的软件可以处理负障碍物以及 3D 可穿越性分析和 path planning at average rate of 2Hz.),并且仍然在2.2m以外停止,远离SVM 6m的崎岖地形范围限制。 此外,大型车辆可以每小时 37 公里的速度行驶,在 O.5 秒内处理数据,并在 14 米外停下,略低于 16 米的 svm 崎岖地形范围限制。 这是实现高速越野自动驾驶目标的良好起点。
负障碍物检测的最佳解决方案是结合用于短距离检测的 SVM 和用于长距离检测的 NODR。 了解这个确切的范围限制以及如何进一步推动它是未来工作的任务,并且可以提供更好的结果。
(尝试在远距离检测负障碍物的问题之一是 3D 激光雷达的垂直角分辨率。 提高这种角度分辨率的一种可能解决方案是保留多次扫描并在车辆移动时对其进行分析,无论是来自 3D 激光雷达还是来自单扫描 Iidar,以这样一种方式倾斜,它会发现足够远的负面障碍物 及时做出反应。 连续扫描之间的距离将仅取决于激光雷达的刷新扫描率和车辆的速度。 例如,在以 32kph 行驶的车辆上以 40Hz 扫描的激光雷达可以每隔 O.22m(可以设置为距车辆的任何距离)检测一次地面。 目前,较小的激光雷达在 16 米外的激光雷达扫描之间跳过 2 米。 大型激光雷达在 75 米外的激光雷达扫描之间跳过 32 米。)