基于多传感器数据融合的全自动泊车系统研究与应用(开题报告)
论 文 题 目 基于多传感器数据融合的全自动泊车系统研究与应用
论文选题来源 以某公司自动泊车项目为依托
本课题研究的目的、意义
随着工业4.0的到来,通讯技术、计算机技术、人工智能技术已经应用到汽车领域。在智能汽车领域所涉及到的环境感知技术、控制技术等已经得到了快速的发展,传统的汽车逐步实现车与人、车与路、车与车、车与云平台的信息交换共享。国内近期将会实现自动驾驶辅助系统智能化,远期将会实现完全无人驾驶的目标。伴随着社会经济的发展,城市停车空间的日益紧张以及人们对安全、舒适、节能、高效驾驶的追求,自动泊车辅助系统逐渐走进人们的生活,因此,各大院校、研究所、汽车厂商纷纷加大投入进行该领域的研发、试验和实车应用。自动泊车系统通过安装在车体四周的传感器来感知环境进行车位的智能识别,之后建立起空间坐标来规划出相应的轨迹,驱动装置按照预先设定好的数学模型,由算法进行控制,实现自动泊车的过程。自动泊车辅助系统根据预先设计好的策略对路径跟踪,避免车辆与障碍物发生碰撞,减轻驾驶员泊车时的心里负担,帮助驾驶人员安全准确地将车辆停进车位。因此,自动泊车系统对驾驶员辅助泊车具有极其重要的意义。
从关键技术的角度而言,车位检测、路径规划、运动控制成为国内研究的重点。目前车位检测通常有两种实现方式,一种采用超声波传感器或激光雷达测距,另一种采用超声波传感器或激光雷达与图像传感器融合,前者受温度、车速、探测方向、系统电路的影响而增大了测量误差,后者受光强影响会出现检测车位失败。对于路径规划的研究,主要有三种路径规划方式:文献[1-4]采用模糊控制的策略、神经网络,提出了来回多段移动式的泊车路径规划方法;文献[5-7]提出了基于B样条曲线、五次多项式曲线、贝塞尔曲线等曲率连续的泊车路径规划方法;文献[8]提出了由圆弧和直线组成的曲率不连续的泊车路径规划方法。基于模糊控制策略、神经网络路径规划的方法,在泊车过程中不需要停车转动方向盘,但是计算量较大;基于曲率连续的路径规划,对车速的控制要求高,文献[9]中采用B样条曲线对泊车路径曲率进行平滑处理,文献[10]中采用B样条曲线设计泊车路径,虽实现曲率的连续性,但是未考虑方向盘转速对跟踪效果的影响和车速的控制;基于曲率不连续的路径规划,特别是两段式泊车路径规划方法计算量小,但是泊车连贯性低[11]。对
于运动控制,由于泊车的起始位置相对单一,车运动过程中车速的波动,泊车终止位置范围未进行明确定义,目前的控制算法还存在很多不足。文献[12]中以滑动转向的车辆运动学模型为基础,针对不同泊车阶段分别设计出不同的模糊逻辑控制方法。上述的关键技术直接影响车辆能否检测到车位并选择合适的泊车方式,将车辆准确地停放在规划的终点位置。因为在实际泊车时,车位边上的车辆姿态各异,车位地面无辅助线,自动、准确地寻找一个可以停车的车位成为一个难点,之后如何通过车辆尺寸参数与环境参数规划出一条泊车路径,成为研究的关键内容。由此可见,车位智能识别、路径规划成为本课题研究的关键。
车位智能识别主要依靠环境探测传感器,其中常用的有超声波传感器、激光雷达、摄像头,通过单个传感器测距或多个传感器信息融合完成车位的探测。超声波传感器与其他环境探测传感器相比,不受色彩、光照、烟雾、电磁等影响,且结构简单、价格低廉。模糊理论模仿人的思维,较好地应用在车位识别与运动控制中。B样条理论应用在泊车路径设计中,可以得到曲率连续、变化缓慢的泊车路径,满足壁障约束、方向盘转角与转向角速度约束、车辆停放要求,简化了车速控制,降低了泊车难度,提高泊车的成功率。
基于上述背景,本课题针对车位智能识别、轨迹规划两个关键问题,运用超声波传感器、轮速传感器组成的测距系统,结合模糊理论进行车位的智能检测,之后分析泊车过程中的碰撞约束、方向盘转速与转向角速度的关系,基于B样条理论对泊车路径进行规划,通过设计几种泊车工况对路径仿真分析与实车试验,最后实现自动泊车的功能。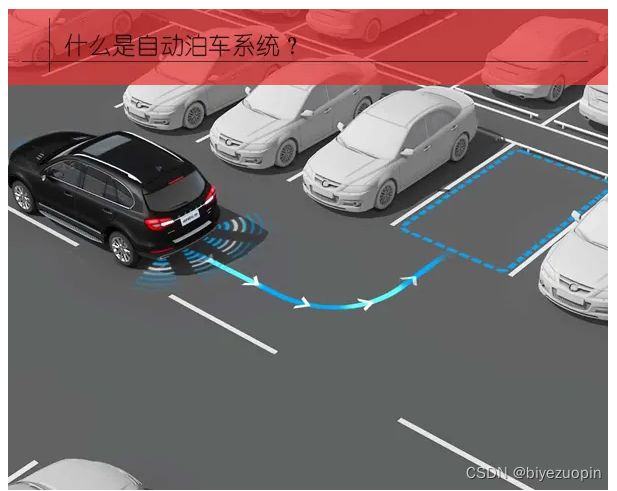
本课题国内外研究概况(并在表格最后附上文献综述)
- 自动泊车的发展现状
目前,对于自动泊车的研究很多,大致分为三个方面:一是车位的智能识别,通过环境感知传感器检测到合适的泊车位,根据泊车位的参数决策出其采用垂直泊车、平行泊车、还是斜向泊车的方式;二是路径规划,研究者们根据车位的分布情况,加一些约束条件,规划出一条安全路径;三是运动控制,基于经验算法的研究,研究人员通过遗传算法、神经网络算法、蚁群算法、自适应算法、模糊控制等方法设计出运动控制器,对轨迹进行跟踪控制。对于自动泊车系统的生产企业均为国外零部件企业,国内研发进度缓慢。
(1)国外研究现状
国外对自动泊车的研究比较早,早在1989年斯坦福大学的Derrick Nguyen和Bernard Windrow教授首次发表神经网络的半挂车自动泊车研究成果[13]。1990年,南加州大学的Seong Gon和Bart Kosko发表了《卡车倒车控制系统中模糊控制和神经网络的比较》,该文指出:在解决小车倒车问题时,模糊控制比神经网络更精确,误差更小[14]。1994年,Laumont等人通过计算两条路径的方法第一次实现自动平行泊车。1999年,英国K.Jiang\L.D.Seneviratne等人将自动平行泊车分为检测、定位、调整三个阶段,检测定位到车位后,规划出泊车路径并进行跟踪。此外还研究了速度、横纵向运动、汽车转角限制等不确定因素对自动泊车的影响,通过试验验证了方案的可行性[15]。
之后,荷兰的Ming Feng Hsieh等人针对泊车过程中汽车无法按照规划的轨迹行驶,建立了一种可以实时控制的泊车控制器,该算法可以根据不同起始位置实现自动泊车,并通过汽车模型验证了算法的可行性[16]。为了适用多种泊车工况,日本千叶大学的Liu等人以汽车速度和转向角为控制参量的方法,对转向角和车位的限制进行路径规划并采用实时壁障算法实现自动泊车[17]。为了精确地检测到车位,韩国Young-Woo Ryu等人用模糊控制的方式改进了泊车系统,通过超声波传感器与视觉传感器进行数据融合进行车位的检测与车辆的定位[18]。
(2)国内研究现状
国内对自动泊车技术的研究起步较晚,文献[19]综述了国内汽车工程学科的学术研究,结果表明,对泊车问题的研究,国内还停留在初级阶段,大部分研究还只是基于实验室。相比于大众、奔驰、丰田、福特、宝马、雪铁龙、等国外的车企早已在中高端车型上配备了自动泊车辅助系统,国内自动泊车辅助系统还有很大的发展空间和应用前景。
1999年,西安电子科技大学的李汉兵等人研究了自动泊车的模糊控制预测器,解决了在不改变Kosko倒车规则的情况下的死区倒车问题[20]。2001年,清华大学的于伟等人以Kosko的模型控制器为切入点,采用遗传算法对控制器的输入输出参数进行了优化[21]。比亚迪于2003年12月向国家知识产权局提出了自动泊车系统的实用新型专利申请[22],并在2005年6月获得授权,目前已经在比亚迪秦的高配车型上得到初步应用。2007年,吉林大学的李占江对遗传算法和模糊控制理论进行了研究,分别对平行、垂直、斜式泊车设计出控制器[23]。2009年,吉林大学的张辉针对自动倒车入库的目标库的选择、转向控制算法、行为控制进行了研究[24]。2013年华南理工大学杨昊规划了两段圆弧相切路径,采用五阶曲线拟合,解决了运动过程中速度波动给系统带来的干扰问题。随着外资企业进入中国,一些技术被应用到国产的合资车型上,自动泊车技术的应用比例于2017年已经达到19.19%,预计2020年后,自动泊车市场应用率达到30%,但是搭载自动泊车系统的国产车型数量有限。 - 车位识别与路径规划技术现状
随着城市车位空间变得狭小、新手泊车过程中碰撞问题的发生、科学技术的进步,车位的智能识别与路径的规划这两个关键技术已有很多汽车零配件供应商争相开发。车辆在低速行驶时,系统自动寻找有效车位;在车位寻找完成后提示驾驶员停车,驾驶员通过一键操作便可以将车辆按照自动规划好的路径停到车位。整个过程降低泊车难度,提高驾驶舒适性和安全性。对于车位智能识别与路径规划方法的研究是实现自动泊车的关键难点。目前,国内外研究人员均投入了大量的研究,并将其工程化应用。
(1)车位识别技术现状
对于车位的识别,国内外已经有很多方法。基于超声波测距法、激光雷达测距法、微波测距法、双目视觉法、环视摄像头全景识别法等对车位探测与识别。目前比较成熟的有基于超声波自动泊车车位检测系统与基于环视摄像头全景泊车车位检测系统。相对于全景泊车车位识别、激光雷达车位检测等,超声波车位检测系统具有成本低、对环境要求较低等优点,对于近距离探测而言,超声波探测精度已经相当精确。经过多年的技术积累,泊车技术已经有较大的发展,从早期前后保险杠接触障碍物发生警报,到后来的摄像头提供倒车影像,蜂鸣器发生警报来辅助泊车。随着技术的变革,超声波传感器探测距离和探测精度的提高,车辆可自主探测车位,但是仍然需要驾驶员换挡操作。最新的车位识别系统在车辆保险杠安装6到8个超声波传感器,两侧传感器能探测5m左右距离,前后保险杠传感器测距1.5m左右,来确定障碍物与保险杠的距离。驾驶员只需要一键操作,基本实现车辆自动探测与全自动泊车功能。
(2)路径规划技术现状
目前,对于轨迹规划的研究方法有很多,文献[25]采用两圆弧相切的方法进行双向路径规划平行泊车并建立碰撞约束函数,但对转向盘转向精度要求高,且泊车系统EPS工作负荷大。文献[26]采用多段圆弧曲线设计泊车路径,并采用回旋曲线连续曲率不连续的多段圆弧,但未研究处理后的路径是否满足车辆碰撞约束。文献[27]中采用Bezier曲线对泊车轨迹进行拟合,实现了泊车路径曲率的连续性,但对车速控制要求高。文献[28]中采用反正切函数设计泊车路径,采用三次多项式解决泊车过程中轨迹不确定性,但增加了计算量与模型参数辨别的难度。文献[29]中采用改进的反正切函数设计泊车路径,解决了原地转向问题,但由于曲线变化不灵活,需要的车位空间较大。文献[30]中采用一种连贯且计算量小的五段式泊车路径规划,并设计了基于PID闭环反馈的车速控制系统,其充分利用了EPS原有的资源,试验表明整个泊车过程的平稳性、连贯性较好。文献[31]采用B样条曲线对泊车路径进行平滑处理,虽然避免了泊车过程中原地转向现象,但未考虑方向盘转速对跟踪效果的影响。文献[32]中应用微分平坦理论将泊车规划问题转化为参数优化问题,但未对所求的结果是全局最优化还是局部最优化进行研究。上述可知,对于自动泊车的轨迹规划,虽然在研究的方法上很多,从国内泊车的应用情况来看,自动泊车技术还未完全成熟。
本课题研究内容、研究方法及研究思路
1、研究内容
(1)介绍超声波测距原理;根据超声波测距原理,设计出超声波测距模块的硬件结构电路;对设计的电路进行分析能够产生超声波,实现超声波的发送与接受,从而实现利用超声波方法实现测距;C语言编写主程序与中断服务程序;通过超声波的发送和接收的时间差测得距离,并对距离误差进行分析。
(2)针对自动泊车系统对不同类型的车位识别困难的问题,提出了一种以超声波传感器、视觉感知传感器信息为基础的车位智能识别方法来辨别车位两侧车辆姿态,并建立车位参数模型;在车位参数模型建模完成后,将车位两侧车辆姿态参数、车位参数作为输入,根据输入输出的隶属函数关系,结合驾驶员的先验知识,运用模糊推理计算输出相应的泊车车位识别结果;为了解决车位长度测量的误差,在原有车位探测系统的基础上融入了轮速脉冲传感器,提高测量的精度。通过对比分析改进前后的测量系统,验证加入轮速脉冲传感器可提高车位识别结果的准确性。
(3)以平行泊车工况为例,首先运用反正切函数对自动平行泊车轨迹进行拟合,并采用MATLAB对泊车轨迹进行仿真分析;其次,提出基于B样条理论的平行泊车路径规划方法,并使用Simulink软件进行路径跟踪仿真;分析两种路径规划方法各自的优点与缺陷,规划出更优的泊车路径。
(4)以某公司的自动泊车项目为依托,建立泊车模型,进行实车试验、数据采集、结果误差分析。
2、研究方法
通过本论文所要研究的内容,主要的工作任务有:根据超声波测距原理,设计出可以实现超声波收发和测距的硬件结构电路,C语言编写主程序与中断服务程序;根据车辆姿态建立空间参数模型,运用模糊推理识别车位;分别运用反正切函数、B样条理论拟合规划的泊车路径,运用MATLAB进行仿真分析;通过实车试验,验证本课题研究的可行性与工程实用性。
(1)学习并掌握单片机原理以及超声波检测原理,根据超声波回波的特点来设计硬件电路以及编制相应的软件程序,通过对AltiumDesigner的学习,掌握电路设计的方法和控制系统硬件的设计,通过对keil4与C语言的学习,掌握主程序软件开发方法与步骤,通过对STC-ISP、Renesas Flash Programmer等程序下载软件的学习,掌握对程序的烧录。
(2)学习了解停车位智能识别技术基本原理,针对不规则车位,建立车身姿态模型、停车位空间参数模型,以停车位空间参数模型和车身姿态模型提取的参数为输入,将驾驶员的经验判断作为基准规则,通过模糊推理计算,实现车位类型的识别。
(3)以平行泊车工况为例,通过了解平行泊车的系统流程、平行泊车过程的数学模型,运用反正切函数拟合出曲率连续的泊车路径;为了保证泊车路径的可跟踪性,建立车辆方向盘转向角度和转向角速度约束函数,以B样条曲线控制点为变量,规划出曲率连续、变化缓慢、满足泊车壁障约束、方向盘转向角度与转向角速度约束的泊车路径。通过MATLAB仿真分析,对比两种路径拟合结果。
(4)完成以上工作后,进行实车试验、数据采集、结果分析。
3、研究思路
根据本文研究的内容可以看出,本文将在实现超声波测距系统的基础上提出一种车位识别的方法,通过空间参数模型的建立,结合模糊推理的知识,从而实现车位的智能识别,车位智能识别的基本原理如下图1所示。此外,以平行泊车工况为例,根据平行泊车的数学模型,分别运用反正切函数、B样条曲线拟合出泊车路径,运用MATLAB仿真分析。最后通过实车试验,数据采集与分析,验证上述设计方法的工程实用性。研究思路图如下图2所示。
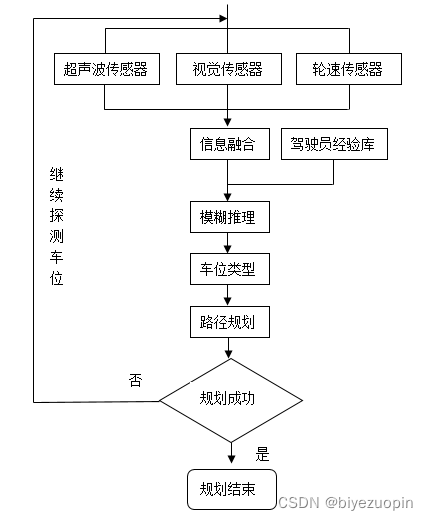
图1 车位智能识别的基本原理图

图2 研究思路图
本课题预期的进展和成果:
1、预期进展
(1) 2019.05-2019.09 查阅资料,了解与本课题相关的国内外研究现状,明确课题研究内容与目的,撰写开题报告,完成文献综述;
(2) 2019.10-2020.03 整理所查找的相关资料,进行硬件选型、软件编程,实现超声测距系统,设计出车位智能识别的方法,规划出平行泊车工况的泊车路径;
(3) 2020.04-2020.08 实现车位智能识别算法,泊车路径规划算法,运用MATLAB进行仿真分析,最后进行实车自动泊车试验;
(4) 2020.09-2020.12 进行论文说明书的撰写,准备答辩。
2、预期成果
(1)根据研究生毕业要求,提交毕业学位论文一篇;
(2)在国内外期刊发表论文1-2篇。
本课题特色与创新之处:
随着科技的进步与城市车位空间的减小,汽车逐渐向智能化发展,如何安全快速地泊车成为驾驶员面临的难题。对于自动泊车技术,很多汽车零部件厂商与研究所投入的大量的研究,也取得了一定的成果,但是将此项技术工程化应用还有很长的路要走。本课题的创新之处在于:
(1)基于超声波测距系统的基础上,融合轮速脉冲传感器、视觉感知传感器,针对非标准、不规则的停车位,建立车位空间参数模型,设计出一种车位智能识别方法,并通过算法实现。
(2)以平行泊车工况为例,根据平行泊车的数学模型,分别运用反正切函数、B样条曲线拟合出泊车路径,结合两种路径规划方法的优点,设计出更优的泊车路径,运用MATLAB仿真分析。将上述所设计的方法运用到实车泊车试验中去,验证本课题所设计的车位智能识别、路径规划方法的工程实用性。
预计存在的主要问题、困难及解决办法:
(1)对于超声波测距系统,需要进行芯片的选型、测距模块硬件结构电路的设计;对设计的电路进行分析能够产生超声波,实现超声波的发送与接受;C语言编写主程序与中断服务程序;需要对超声波测距误差进行分析。
解决办法:超声波测距在距离探测方面已经相当完善了,在此基础上进行开发,需要熟练掌握设计与开发软件AltiumDesigner、keil4、STC-ISP分别进行电路的设计、程序的编写、程序的下载。如果可能的话,会对测距误差进行分析改进,提高其测量精度。
(2)对车位智能识别,需要融合超声波传感器、轮速脉冲传感器、视觉感知传感器信息;针对不规则的停车位,建立车位空间参数模型,设计出一种车位智能识别方法,并通过算法实现。
解决办法:需要对传感器方面的知识进行了解,泊车控制器内容的学习;了解车辆运动学简化模型,构建车辆空间参数模型;模糊推理理论知识的学习,设计车位类型的智能识别方法及算法的实现。此外,需要熟练掌握MATLAD软件,阅读大量的文献书籍。
(3)针对平行泊车的工况,需要构建一个满足碰撞约束、跟踪约束、曲率连续、停车规范的多约束的路径曲线;需要用到汽车运动学、汽车动力学方面的知识。
解决方法:通过对Ackermann转向几何、《汽车理论》中汽车动力学与运动学知识内容的深入学习;需要熟练掌握MATLAB/Simulink对曲线进行拟合以及工程曲线拟合原理。此外,还需要大量阅读文献书籍。
导师意见:
随着科技的进步,多传感器技术得到了发展。面对城市空间车位的减小、泊车安全问题,对自动泊车系统的研究与应用具有实际的工程意义。
此课题的研究内容比较丰富,课题的工作量比较大,在保证质量的同时,希望对单个重点内容展开更加深入的研究,并增加创新之处。此课题内容详细、充实,符合开题要求,工作安排合理,时间分配符合一般程序。
参考文献:
[1] Carlos M S, Matilde S P,Luis G S. A fuzzy decision system for an autonomous car parking[J].Intelligent Systems Reference Library,2012,33(2):237-258.
[2] 自动平行泊车系统的研究[D]. 合肥: 中国科学技术大学, 2010.
[3] 姜辉, 郭孔辉, 张建伟. 基于路径规划的自动平行泊车转向控制器[J]. 吉林大学学报(工学版), 2011, 41(2):293-297.
[4] 吴冰, 钱立军, 虞明等. 基于RBF神经网络的自动泊车路径规划[J]. 合肥工业大学学报(自然科学版), 2012, 35(4):459-462.
[5] Maekawa T, Noda T, Tamura S. Curvature continuous path generation for autonomou-s vehicle using B-spline curves[J]. Computer-Aided Design, 2010, 42(4):350-359.
[6] Zhang S W,Simkani M,Zadeh M H. Automatic vehicle parallel parking design using fifth degree polynomial path planning[C]//Vehicular Technology Conference,Budapest,2011:1-4
[7] Zhao L,Zheng G Q,Li J S. Automatic parking path optimization based on curve fittin-g[C]//Proc of IEEE International Conference on Automation and Logistics, Zhengzhou,Ch-ina,2012:583-587.
[8] 张野, 陈慧, 程昆朋. 基于两步法的平行泊车分段路径规划算法[J]. 计算机仿真, 2013, 30(6):169-173.
[9] GOMEZ-BRAVO F,CUESTA F,OLLERO A. Continuous Curvature Path Generation B-ased on B-spline Curves for Parking Manoeuvres[J].Robotics and Autonomous Systems,2008,56(4):360-372.
[10] 李红, 郭孔辉, 宋晓琳. 基于样条理论的自动垂直泊车轨迹规划[J]. 湖南大学学报(自然科学版), 2012, 39(7):25-30.
[11] 王道斌, 梁华为, 杨妮娜等. 两种自主泊车路径规划方法的对比研究[J]. 电子测量技术, 2011, 34(1):27-30.
[12] Zhao Y , Collins E G . Fuzzy parallel parking control of autonomous ground vehicl-es in tight spaces[J]. IEEE International Symposium on Intelligent Control Houston Tx P-p–, 2003:811-816.
[13] Nguyen D H , Widrow B . Neural networks for self-learning control systems[J]. Int-ernational Journal of Control, 1991, 54(6):1439-1451.
[14] Kong S G , Kosko B. Comparison of fuzzy and neural truck backer-upper control s-ystems[C]// Ijcnn International Joint Conference on Neural Networks. IEEE, 1990.
[15] Laugier C, Fraichard T,Garnier P. Sensor-based control architecture for a car-like ve-hicle[J].Autonomous Robots, 1999,6(2):165-185.
[16] Ming F H, Ozguner U. A parking algorithm for an autonomous vehicle[C]//IEEE Int-elligent Vehicles Symposium,2008:1155-1160.
[17] Liu K Z,Dao M Q,InoueT. Theo and experiments on automatic parking systems[C]//I-EEE Control Automation,Robotics and Vision, 2005:861-866.
[18] Ryu Y W,Oh S Y,Kim S Y. R Y. Robust automatic parking without odometry usin-g enhanced fuzzy logic controller[C]//IEEE International Conference on Fuzzy Systems,2006:521-527.
[19] 《中国公路学报》编辑部. 中国汽车工程学术研究综述·2017[J]. 中国公路学报, 2017(6).
[20] 李汉兵, 谢维信. 模糊预测器在倒车系统中的应用[J]. 西安电子科技大学学报(自然科学版), 1999(3).
[21] 于伟, 张乃尧, 白帆. 倒车问题的模糊优化控制方案[J]. 机电一体化, 2001(5).
[22] 黄文, 邵丽青. 自动泊车系统的智能化发展[J]. 汽车与配件, 2012(32):32-34.
[23] 李占江. 车辆自动泊车的模糊控制方法研究[D]. 长春:吉林大学, 2007.
[24] 张辉. 轿车自动倒库转向控制几何推导算法和模糊逻辑算法研究[D]. 长春:吉林大学, 2008.
[25] 侯晓阳, 黄勇, 孙思. 多约束平行泊车路径规划[J]. 汽车技术, 2015(9):48-52.
[26] Muller B , Deutscher J , Grodde S . Continuous Curvature Trajectory Design and F-eedforward Control for Parking a Car[J]. IEEE Transactions on Control Systems Technol-ogy, 2007, 15(3):541-553.
[27] 刘 钰, 马艳丽, 李 涛. 基于Bezier曲线拟合的自主平行泊车轨迹模型仿真[J]. 科技导报, 29(11-11).
[28] 彭莉斯, 朱明, 蒋涛等. 基于三阶反正切函数模型的平行泊车轨迹规划[J]. 测控技术, 2018, v.37;No.317(07):152-156.
[29] 李红, 郭孔辉, 宋晓琳等. 基于Matlab的多约束自动平行泊车轨迹规划[J]. 中南大学学报(自然科学版), 2013, 44(1):101-107.
[30] 钱立军, 胡伟龙, 刘庆等. 多段式自动泊车路径规划及其关键技术[J]. 吉林大学学报(工学版), 2016, 46(3):785-791.
[31] F. Gomez-Bravo, Cuesta F , Ollero A. Continuous curvature path generation based o-n spline curves for parking manoeuvres[J]. Robotics & Autonomous Systems, 2008, 56(4):360-372.
[32] 宋金泽. 自主泊车系统关键技术研究[D]. 长沙: 国防科学技术大学, 2009.