【项目实战-MATLAB】:Pan-Tompkins检测算法
Pan-Tompkins检测算法原理
PT算法是由Pan和Tompkins等人首次提出的具有自适应性的双阈值QRS波检测算法,能用于实时处理的R波1201。检测依据主要是基于R波的形态特征,包含幅值、斜率、时间信息,算法主要包括预处理实现R波增强、R波综合决策两部分,算法流程图如图1所示。
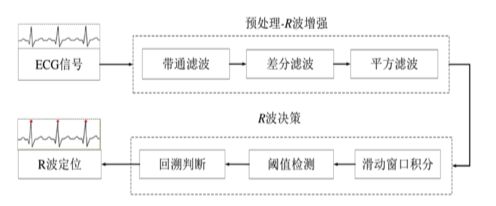
图 1
算法流程如下:

(1)预处理
经过带通滤波与差分滤波后的心电信号,已经实现了工频噪声与基线漂移噪声的滤除:其中差分泌波的运算可以对R波斜率进行增强,突出R波成分的同时可以对P波与T波进行抑制,紧接着的平方处理使得信号幅值都为正,避免了波峰朝下,如倒置的R峰;再通过滑动积分来获取待决策的R峰位置。
(2)阈值筛选
经过多道滤波器处理后,所得到的峰值可能是R波,也可能是混合的噪声。算法采取了系列阅值条件筛选峰值,忽略较大波峰前后的200ms内的所有峰值,比照判断是否存在双峰:若信号波峰出现在已检测的R波的360ms之后,则将该信号的峰值作为R波。采用的双阈值检测方法中第二个阈值是第一个阈值的一半。若波峰大于第一个阈值,则被视为R波,否则为干扰。
(3)回溯判断定位R波
若在平均RR间期的1.5 倍时间内,都无R波出现,则“回溯重判”进行搜索,将检测到的波峰值与第二个阀值相比,若更大,且峰值应该出现在上一个QRS波的360ms后的波峰,均满足后则可判定该峰值为R波。
代码:
参考这个博主的 这个博主写的很好!链接


结果分析:
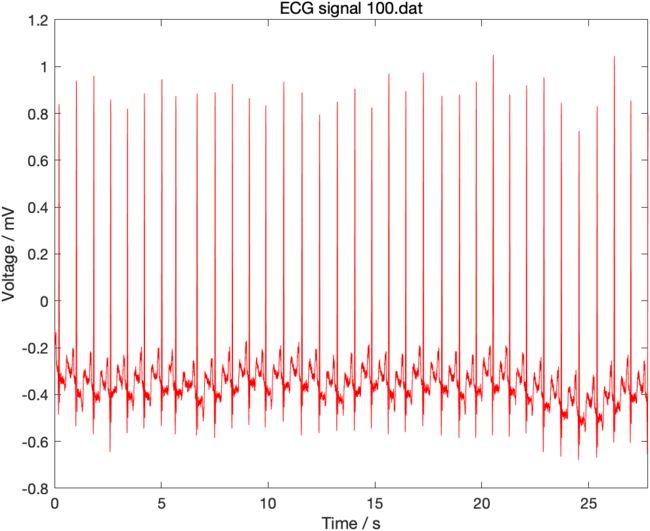
通过取MIT-BIH数据库的100号记录中的ECG信号,采用PT算法的差分阈值算法进行实验仿真,结果如上图所示,图中展现了心电信号在差分阈值法各处理步骤下的波形变化,由原始信号到R波识别的过程清晰明显。由该算法的原理和实验结果,给出以下讨论分析:
(1)优势
该算法通过斜率、幅度和宽度信息来对R波进行了有效地检测。多道滤波器的处理迅速去除了噪声干扰,并根据RR间隔实现了自适应的阈值调整。
(2)不足
该算法在抑制噪声干扰的能力有所不足:当使用移动窗口对求导后的平方信号进行积分处理时,不仅仅会得到候选的R峰,也很可能会得到与R波形态类似的高频噪声,使得算法不能够很好地实现区分,会直接导致误检的情况发生。当心电信号的噪声干扰的程度较为严重时,误检情况会增大。
(3) 优化方向
针对(2)中提及的问题,近些年研究学者为了适应R波变化,提出了多种基于动态自适应阈值的检测方法,根据心电信号不同时间产生的随机变化,阈值实也跟随着不断自动调节,提高了检测的准确率,但是考虑到阈值重复调整的过程中,计算量会使得算法的快速实时性会受到影响。另一方面,还有在有效去除地噪声干扰,从而增强R波成分的方法上改进,大量的去噪计算也增加了R波检测的工作量和计算成本,抗干扰性提高后,快速实时性却下降。因此,如何在避免大量计算的前提,对抗干扰性进行优化是-一个重要的研究方向。
clc; clear;
%% 读入数据
%------ SPECIFY DATA ------------------------------------------------------
%------ 指定数据文件 -------------------------------------------------------
PATH= '/Users/liuyuanyuan/Desktop/乱码七糟/F68007ECG心电信号处理—R峰检测/mit-bih-arrhythmia-database-1.0.0'; % 指定数据的储存路径
HEADERFILE= '100.hea'; % .hea 格式,头文件,可用记事本打开
ATRFILE= '100.atr'; % .atr 格式,属性文件,数据格式为二进制数
DATAFILE='100.dat'; % .dat 格式,ECG 数据
SAMPLES2READ=10000; % 指定需要读入的样本数
% 若.dat文件中存储有两个通道的信号:
% 则读入 2*SAMPLES2READ 个数据
fprintf(1,'\\n$> WORKING ON %s ...\n', HEADERFILE); % 在Matlab命令行窗口提示当前工作状态
%
% 【注】函数 fprintf 的功能将格式化的数据写入到指定文件中。
% 表达式:count = fprintf(fid,format,A,...)
% 在字符串'format'的控制下,将矩阵A的实数数据进行格式化,并写入到文件对象fid中。该函数返回所写入数据的字节数 count。
% fid 是通过函数 fopen 获得的整型文件标识符。fid=1,表示标准输出(即输出到屏幕显示);fid=2,表示标准偏差。
%
signalh= fullfile(PATH, HEADERFILE); % 通过函数 fullfile 获得头文件的完整路径
fid1=fopen(signalh,'r'); % 打开头文件,其标识符为 fid1 ,属性为'r'--“只读”
z= fgetl(fid1); % 读取头文件的第一行数据,字符串格式
A= sscanf(z, '%*s %d %d %d',[1,3]); % 按照格式 '%*s %d %d %d' 转换数据并存入矩阵 A 中
nosig= A(1); % 信号通道数目
sfreq=A(2); % 数据采样频率
clear A; % 清空矩阵 A ,准备获取下一行数据
for k=1:nosig % 读取每个通道信号的数据信息
z= fgetl(fid1);
A= sscanf(z, '%*s %d %d %d %d %d',[1,5]);
dformat(k)= A(1); % 信号格式; 这里只允许为 212 格式
gain(k)= A(2); % 每 mV 包含的整数个数
bitres(k)= A(3); % 采样精度(位分辨率)
zerovalue(k)= A(4); % ECG 信号零点相应的整数值
firstvalue(k)= A(5); % 信号的第一个整数值 (用于偏差测试)
end;
fclose(fid1);
clear A;
%------ LOAD BINARY DATA --------------------------------------------------
%------ 读取 ECG 信号二值数据 ----------------------------------------------
%
if dformat~= [212,212], error('this script does not apply binary formats different to 212.'); end;
signald= fullfile(PATH, DATAFILE); % 读入 212 格式的 ECG 信号数据
fid2=fopen(signald,'r');
A= fread(fid2, [3, SAMPLES2READ], 'uint8')'; % matrix with 3 rows, each 8 bits long, = 2*12bit
fclose(fid2);
% 通过一系列的移位(bitshift)、位与(bitand)运算,将信号由二值数据转换为十进制数
M2H= bitshift(A(:,2), -4); %字节向右移四位,即取字节的高四位
M1H= bitand(A(:,2), 15); %取字节的低四位
PRL=bitshift(bitand(A(:,2),8),9); % sign-bit 取出字节低四位中最高位,向右移九位
PRR=bitshift(bitand(A(:,2),128),5); % sign-bit 取出字节高四位中最高位,向右移五位
M( : , 1)= bitshift(M1H,8)+ A(:,1)-PRL;
M( : , 2)= bitshift(M2H,8)+ A(:,3)-PRR;
if M(1,:) ~= firstvalue, error('inconsistency in the first bit values'); end;
switch nosig
case 2
M( : , 1)= (M( : , 1)- zerovalue(1))/gain(1);
M( : , 2)= (M( : , 2)- zerovalue(2))/gain(2);
TIME=(0:(SAMPLES2READ-1))/sfreq;
case 1
M( : , 1)= (M( : , 1)- zerovalue(1));
M( : , 2)= (M( : , 2)- zerovalue(1));
M=M';
M(1)=[];
sM=size(M);
sM=sM(2)+1;
M(sM)=0;
M=M';
M=M/gain(1);
TIME=(0:2*(SAMPLES2READ)-1)/sfreq;
otherwise % this case did not appear up to now!
% here M has to be sorted!!!
disp('Sorting algorithm for more than 2 signals not programmed yet!');
end;
clear A M1H M2H PRR PRL;
fprintf(1,'\\n$> LOADING DATA FINISHED \n');
%------ LOAD ATTRIBUTES DATA ----------------------------------------------
atrd= fullfile(PATH, ATRFILE); % attribute file with annotation data
fid3=fopen(atrd,'r');
A= fread(fid3, [2, inf], 'uint8')';
fclose(fid3);
ATRTIME=[];
ANNOT=[];
sa=size(A);
saa=sa(1);
i=1;
while i<=saa
annoth=bitshift(A(i,2),-2);
if annoth==59
ANNOT=[ANNOT;bitshift(A(i+3,2),-2)];
ATRTIME=[ATRTIME;A(i+2,1)+bitshift(A(i+2,2),8)+...
bitshift(A(i+1,1),16)+bitshift(A(i+1,2),24)];
i=i+3;
elseif annoth==60
% nothing to do!
elseif annoth==61
% nothing to do!
elseif annoth==62
% nothing to do!
elseif annoth==63
hilfe=bitshift(bitand(A(i,2),3),8)+A(i,1);
hilfe=hilfe+mod(hilfe,2);
i=i+hilfe/2;
else
ATRTIME=[ATRTIME;bitshift(bitand(A(i,2),3),8)+A(i,1)];
ANNOT=[ANNOT;bitshift(A(i,2),-2)];
end;
i=i+1;
end;
ANNOT(length(ANNOT))=[]; % last line = EOF (=0)
ATRTIME(length(ATRTIME))=[]; % last line = EOF
clear A;
ATRTIME= (cumsum(ATRTIME))/sfreq;
ind= find(ATRTIME <= TIME(end));
ATRTIMED= ATRTIME(ind);
ANNOT=round(ANNOT);
ANNOTD= ANNOT(ind);
%------ DISPLAY DATA ------------------------------------------------------
figure(1); clf, box on, hold on
plot(TIME, M(:,1),'r');
% if nosig==2
% plot(TIME, M(:,2),'b');
% end;
% for k=1:length(ATRTIMED)
% text(ATRTIMED(k),0,num2str(ANNOTD(k)));
% end;
xlim([TIME(1), TIME(end)]);
xlabel('Time / s'); ylabel('Voltage / mV');
string=['ECG signal ',DATAFILE];
title(string);
fprintf(1,'\\n$> DISPLAYING DATA FINISHED \n');
% -------------------------------------------------------------------------
fprintf(1,'\\n$> ALL FINISHED \n');
%% QRS检测
ecg = M(:,1)';
if ~isvector(ecg)
error('ecg must be a row or column vector');
end
ecg = ecg(:); % vectorize
Fs = 200;
flag = 1;
%ecg是输入的信号,Fs是抽样频率,plot是是否绘图,绘图为1,不绘图为0
% 经过滤波求导平方均值后的信号和阈值
Signal_mean = [];
Signal_mean_index = [];
Thresh_Signal_mean = 0;
Thresh_Noise_mean = 0;
% 经过滤波求导平方均值后的噪声
Noise_mean = [];
Noise_mean_index = [];
% 经过带通滤波后的信号和阈值
Signal_filter = [];
Signal_filter_index = [];
Thresh_Signal_filter = 0;
Thresh_Noise_filter = 0;
% 当前信号、当前噪声大小
Signal_temp_mean = 0;
Noise_temp_mean = 0;
Signal_temp_filter = 0;
Noise_temp_filter = 0;
% 经过滤波求导平方均值后的信号和噪声的暂存
Signal_mean_buf = [];
Noise_mean_buf = [];
% 经过带通滤波后的信号和噪声的暂存
Signal_filter_buf = [];
Noise_filter_buf = [];
Thresh_Signal_mean_buf = [];
Thresh_Signal_filter_buf = [];
% 8次有规律的心率间隔
regular_RR_interval = 0;
% 8次心率间隔
mean_interval = 0;
% 心率间隔,regular_RR_interval有值就是regular_RR_interval,不然就是mean_interval
RR_interval = 0;
%<0.36Fs时判断是否是T波,如果确实是R波就是0,否则为1
R_Flag = 0;
%% 滤波1,先低通后高通
if Fs == 200
%低通,H(z) = ((1 - z^(-6))^2)/(1 - z^(-1))^2
b = [1 0 0 0 0 0 -2 0 0 0 0 0 1];
a = [1 -2 1];
h_l = filter(b,a, [1,zeros(1,12)]);
ecg_l = conv(ecg, h_l);
ecg_l = ecg_l / max(abs(ecg_l));
%高通 H(z) = (-1+32z^(-16)+z^(-32))/(1+z^(-1))
b = [-1 zeros(1,15) 32 -32 zeros(1,14) 1];
a = [1 -1];
h_h = filter(b,a, [1, zeros(1,32)]);
ecg_filter = conv(ecg_l, h_h);
ecg_filter = ecg_filter / max(abs(ecg_filter));
%% 滤波2,直接buttord滤波,5-15Hz的数字带通滤波器
else
wp = [5 15] * 2 / Fs;
[B,A] = butter(3, wp);%3阶滤波器
ecg_filter = filtfilt(B,A, ecg);
ecg_filter = ecg_filter / max(abs(ecg_filter));
end
%% 求导 H(z) = (1/8T)(-z^(-2) - 2z^(-1) + 2z + z^(2))
h_d = [-1 -2 0 2 1];
ecg_deri = conv(h_d, ecg_filter);
ecg_deri = ecg_deri / max(abs(ecg_deri));
%% 平方
ecg_square = ecg_deri .^ 2;
%% 窗口均值化
Window_width = 0.15 * Fs;
ecg_mean = conv(ecg_square, ones(1, Window_width) / Window_width);
%% 绘图
if flag
figure;
if Fs == 200
ax(1)=subplot(321);plot(ecg);axis tight;title('原始ECG信号');
ax(2)=subplot(322);plot(ecg_l);axis tight;title('低通滤波后信号');
else
ax(1)=subplot(3,2,[1,2]);plot(ecg);axis tight;title('原始ECG信号');
end
ax(3) = subplot(323);plot(ecg_filter);axis tight;title('带通滤波后信号');
ax(4) = subplot(324);plot(ecg_deri);axis tight;title('差分运算后信号');
ax(5) = subplot(325);plot(ecg_square);axis tight;title('平方后信号');
ax(6) = subplot(326);plot(ecg_mean);axis tight;title('滑动窗口检测后信号');
end
%% 通过findpeaks找到局部的波峰
[peaks, locs] = findpeaks(ecg_mean, 'MINPEAKDISTANCE', round(0.2 * Fs));
%% 对阈值进行初始化,使用前2s的数据
% 初始化信号阈值和噪声阈值,只使用平方并均值后信号前两秒
%信号阈值为前两秒最大值的0.33,噪声阈值为前两秒平均值的0.5
Thresh_Signal_mean = max(ecg_mean(1:2*Fs)) / 3;
Thresh_Noise_mean = mean(ecg_mean(1:2*Fs)) / 2;
Signal_temp_mean = Thresh_Signal_mean;
Noise_temp_mean = Thresh_Noise_mean;
% 初始化信号阈值和噪声阈值,只使用带通滤波后信号前两秒
%信号阈值为前两秒最大值的0.33,噪声阈值为前两秒平均值的0.5
Thresh_Signal_filter = max(ecg_filter(1:2*Fs)) / 3;
Thresh_Noise_filter = mean(ecg_filter(1:2*Fs)) / 2;
Signal_temp_filter = Thresh_Signal_filter;
Noise_temp_filter = Thresh_Noise_filter;
%% 对每个波峰进行处理
for i = 1 : length(peaks)
%% 找到滤波后信号波峰的位置,index是相对值
if locs(i) - round(0.15 * Fs) >= 1 && locs(i) <= length(ecg_filter)
[peak_filter, index_filter] = max( ecg_filter(locs(i) - round(0.15 * Fs) : locs(i)));
index_filter = locs(i) - round(0.15 * Fs) + index_filter - 1;
else
if i == 1 % i = 1是时候index是绝对值
[peak_filter, index_filter] = max( ecg_filter(1 : locs(i)));
else %index是相对值
[peak_filter, index_filter] = max( ecg_filter(locs(i) - round(0.15 * Fs) : end));
index_filter = locs(i) - round(0.15 * Fs) + index_filter - 1 ;
end
end
%% 判断间隔,如果大于1.66要先处理被遗漏的R波,这样才能保持顺序
%要有9个R波,才有8个间隔,才能判断是否大于1.66
if length(Signal_mean) >= 9
RR_diff = diff(Signal_mean_index(end - 8:end));
mean_interval = mean(RR_diff);
temp_interval = Signal_mean_index(end) - Signal_mean_index(end - 1);
if(temp_interval >= 0.92 * mean_interval || temp_interval <= 1.16 * mean_interval)
Thresh_Signal_mean = Thresh_Signal_mean / 2;
Thresh_Signal_filter = Thresh_Signal_filter / 2;
else
regular_RR_interval = mean_interval;
end
end
if regular_RR_interval
RR_interval = regular_RR_interval;
elseif mean_interval
RR_interval = mean_interval;
else
RR_interval = 0;
end
% 心率间隔有值的话
if RR_interval
% 超过了1.66 RR,说明中间有漏检,不应期为0.2ms
if locs(i) - Signal_mean_index(end) >= 1.66 * RR_interval
[pk_temp, pk_temp_ind] = max( ecg_mean(Signal_mean_index(end) + round(0.2 * Fs) : locs(i) - round(0.2 * Fs)));
pk_temp_ind = Signal_mean_index(end) + round(0.2 * Fs) + pk_temp_ind - 1;
% 均值信号大于噪声峰值,加到buf里
if pk_temp >= Thresh_Noise_mean
Signal_mean = [Signal_mean pk_temp];
Signal_mean_index = [Signal_mean_index pk_temp_ind];
%找到滤波信号的位置
if pk_temp_ind <= length(ecg_filter)
[pk_filter_temp, pk_filter_temp_ind] = max(ecg_filter(pk_temp_ind - round(0.15 * Fs) : pk_temp_ind));
else
[pk_filter_temp, pk_filter_temp_ind] = max(ecg_filter(pk_temp_ind - round(0.15 * Fs) : length(ecg_filter)));
end
pk_filter_temp_ind = ecg_filter(pk_temp_ind - round(0.15 * Fs) + pk_filter_temp_ind - 1);
% 滤波信号也大于噪声阈值,加到buf里,同时sig使用新的更新策略
if pk_filter_temp >= Thresh_Noise_filter
Signal_filter = [Signal_filter pk_filter_temp];
Signal_filter_index = [Signal_filter_index pk_filter_temp_ind];
Signal_temp_filter = 0.25 * pk_filter_temp + 0.75 * Signal_temp_filter;
end
Signal_temp_mean = 0.25 * pk_temp + 0.75 * Signal_temp_mean;
end
end
end
%% 当前波峰大于信号阈值
if peaks(i) >= Thresh_Signal_mean
%要有三个波才能有两个间隔
if(length(Signal_mean) >= 3)
%如果间隔小于0.36Fs,判断是T波还是噪声
if locs(i) - Signal_mean_index(end) < round(0.36 * Fs)
Slope_1 = mean(diff(ecg_mean(locs(i) - round(0.075 * Fs) : locs(i))));
Slope_2 = mean(diff(ecg_mean(Signal_mean_index(end) - round(0.075 * Fs) : Signal_mean_index(end))));
%斜率太小了,当前波峰识别为噪声
if Slope_1 <= Slope_2 / 2
Noise_mean = [Noise_mean peaks(i)];
Noise_mean_index = [Noise_mean_index locs(i)];
Noise_temp_mean = 0.25 * peaks(i) + 0.75 * Noise_temp_mean;
Noise_temp_filter = 0.25 * peak_filter + 0.75 * Noise_temp_filter;
R_Flag = 1;%是T波
else%斜率够大,确实是R波
R_Flag = 0;%确实是T波
end
end
end
if R_Flag == 0
Signal_mean = [Signal_mean peaks(i)];
Signal_mean_index = [Signal_mean_index locs(i)];
Signal_temp_mean = 0.125 * peaks(i) + 0.875 * Signal_temp_mean;
if peak_filter >= Thresh_Signal_filter
Signal_filter = [Signal_filter peak_filter];
Signal_filter_index = [Signal_filter_index index_filter];
Signal_temp_filter = 0.125 * peak_filter + 0.875 * Signal_temp_filter;
end
end
%% 当前波峰大于噪声阈值,但小于信号阈值,此时的波峰为噪声波峰
elseif peaks(i) < Thresh_Signal_mean && peaks(i) >= Thresh_Noise_mean
Noise_temp_mean = 0.125 * peaks(i) + 0.875 * Noise_temp_mean;
Noise_temp_filter = 0.125 * peak_filter + 0.875 * Noise_temp_filter;
%% 当前波峰小于噪声阈值,此时的波峰为噪声波峰
else
Noise_temp_mean = 0.125 * peaks(i) + 0.875 * Noise_temp_mean;
Noise_temp_filter = 0.125 * peak_filter + 0.875 * Noise_temp_filter;
Noise_mean = [Noise_mean peaks(i)];
Noise_mean_index = [Noise_mean_index locs(i)];
end
%% 更新阈值参数
Thresh_Signal_mean = Noise_temp_mean + 0.25 * (Signal_temp_mean - Noise_temp_mean);
Thresh_Noise_mean = Thresh_Signal_mean / 2;
Thresh_Signal_filter = Noise_temp_filter + 0.25 * (Signal_temp_filter - Noise_temp_filter);
Thresh_Noise_filter = Thresh_Signal_filter / 2;
%% 信号当前值存入buf
Signal_mean_buf = [Signal_mean_buf Signal_temp_mean];
Noise_mean_buf = [Noise_mean_buf Noise_temp_mean];
% 经过带通滤波后的信号和噪声的暂存
Signal_filter_buf = [Signal_filter_buf Signal_temp_filter];
Noise_filter_buf = [Noise_filter_buf Noise_temp_filter];
Thresh_Signal_mean_buf = [Thresh_Signal_mean_buf Thresh_Signal_mean];
Thresh_Signal_filter_buf = [Thresh_Signal_filter_buf Thresh_Signal_filter];
% 重置Flag
R_Flag = 0;
end
%% 绘制结果图
if flag
figure;
plot(ecg_filter);axis tight;title('R波定位结果');
hold on,scatter(Signal_filter_index, Signal_filter);
end
代码以及参考论文,下载链接 链接