详细步骤:VS2017 C++调用函数python,并且成功运行YOLOv3以及踩过的坑
详细步骤:VS2017 C++调用函数python,并且成功运行YOLOv3以及踩过的坑
- 前言
- 环境
- 一、简单.py文件的调用
-
- 1、安装python
- 2、配置vs2017
- 3、用CPython调用python的类和方法
- 二、调用YOLOv3
-
- 1.配置环境
- 2.代码
文章目录
- 前言
- 环境
- 一、简单.py文件的调用
-
- 1、安装python
- 2、配置vs2017
- 3、用CPython调用python的类和方法
- 二、调用YOLOv3
-
- 1.配置环境
- 2.代码
前言
由于实验室的要求,需要将很多用python写的算法移植到qt上,于是准备先在vs2017进行测试。
网上做C++嵌入pyhton的案例不多,资料也很零零散散,在调试的过程中遇到了很多bug,经过一番令人头秃的调试,最后运行成功了,这里整合了网上的一些资源和自己的一些经验,希望对大家有所帮助。
环境
Visual Studio 2017
python3.6.8
YOLOv3-keras-tensorflow及其对应的anaconda环境
一、简单.py文件的调用
1、安装python
安装python,下载地址pyhton官方下载
我用的是python3.6.8
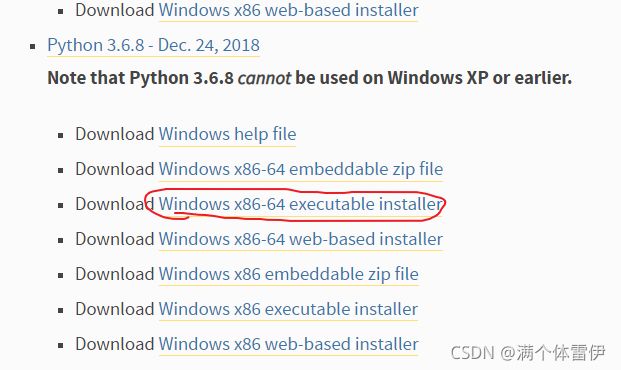
安装的时候要勾选
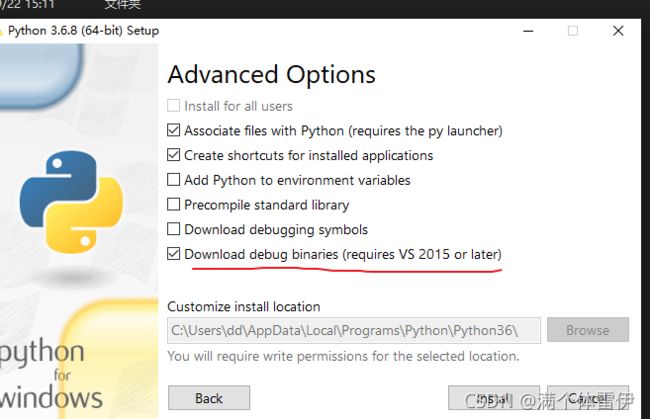
否则会提示找不到dll文件(这步很关键)
2、配置vs2017
首先找到刚才python的安装目录,我的是
C:\Users\dd\AppData\Local\Programs\Python\Python36
复制里面的四个dll文件到项目目录下(不是解决方案目录),并添加

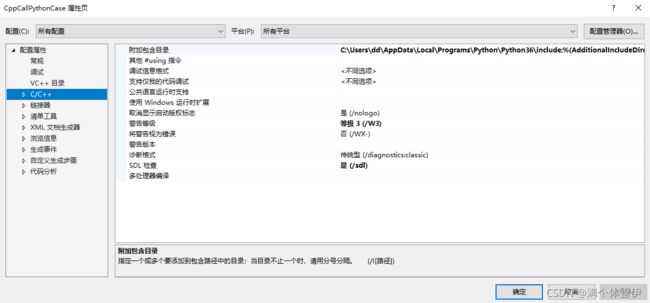
配置附加包含目录
配置库目录

添加lib文件
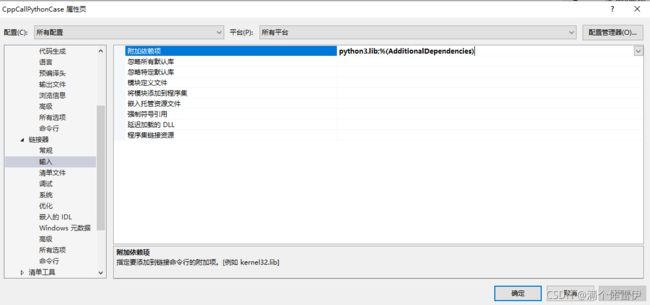
release添加python3.lib,如果用debug则添加python3_d.lib
3、用CPython调用python的类和方法
main.cpp
#include "pch.h"
#include hello.py:
import A
class math:
def __init__(self):
self.test = ''
def add(self, num1, num2):
print (self)
print ("add functin start:", self.test)
print (num1 + num2)
print ("add functin end:<", self.test + ">")
A.add(1,2)
return num1 + num2
可以调用另一个py文件中的方法,但注意要将两个py文件放置于同一级目录下
A.py:
def add(x,y):
print('我是函数A的输出:%d'%(x+y))
测试运行:调取成功
需要注意点有
1、python要用debug版本的,也就是要勾选这个
![]()
2、include和libs配置成功的话基本就不会有问题
二、调用YOLOv3
1.配置环境
找到anaconda中envs目录下yolov3对应的虚拟环境
我的是
C:\Users\dd(对应你的用户名)\anaconda3\envs\tensorflow112
然后找到刚才安装python的目录
我的是
C:\Users\dd\AppData\Local\Programs\Python
把tensorflow112文件夹整个复制过去
然后把它的名称改成python36
之所以这么做是因为如果将vs2017的include、libs改成anaconda中的路径
程序会报模块未找到的问题
而模块未找到的问题一般都是python环境没配好导致的
这里采用的 方法其实是 一种笨办法,大家也可以从修改系统的环境变量入手来解决这个问题
接下来我也会尝试这种方法,成功的话会在这里更新的
这里参考了这位大佬的博客
vs2017引用anaconda虚拟环境中的python第三方库
2.代码
这里参考了这位大佬的博客
C++调用python&Yolov3的千万难 最后成功!!!
main函数代码:不用改,还是可以用上面的,我们可以修改的是hello.py
这里在hello.py中调用了yolo的一个main方法
import A
import yolo
class math:
def __init__(self):
self.test = ''
def add(self, num1, num2):
print (self)
print ("add functin start:", self.test)
print (num1 + num2)
print ("add functin end:<", self.test + ">")
A.add(1,2)
yolo.main()
return num1 + num2
yolo.py
# -*- coding: utf-8 -*-
"""
Class definition of YOLO_v3 style detection model on image and video
"""
import colorsys
import os
from timeit import default_timer as timer
import numpy as np
from keras import backend as K
from keras.models import load_model
from keras.layers import Input
from PIL import Image, ImageFont, ImageDraw
from model import yolo_eval, yolo_body, tiny_yolo_body
from utils import letterbox_image
#import os
from keras.utils import multi_gpu_model
#hh
class YOLO(object):
_defaults = {
"model_path": r'你的路径',
"anchors_path": r'你的路径',
"classes_path": r'你的路径',
#上面试我的绝对路径,大家替换成自己的
"score" : 0.3,
"iou" : 0.45,
"model_image_size" : (416, 416),
"gpu_num" : 1,
}
@classmethod
def get_defaults(cls, n):
if n in cls._defaults:
return cls._defaults[n]
else:
return "Unrecognized attribute name '" + n + "'"
def __init__(self, **kwargs):
self.__dict__.update(self._defaults) # set up default values
#self.__dict__.update(kwargs) # and update with user overrides
self.class_names = self._get_class()
self.anchors = self._get_anchors()
self.sess = K.get_session()
self.boxes, self.scores, self.classes = self.generate()
def _get_class(self):
classes_path = os.path.expanduser(self.classes_path)
with open(classes_path) as f:
class_names = f.readlines()
class_names = [c.strip() for c in class_names]
return class_names
def _get_anchors(self):
anchors_path = os.path.expanduser(self.anchors_path)
with open(anchors_path) as f:
anchors = f.readline()
anchors = [float(x) for x in anchors.split(',')]
return np.array(anchors).reshape(-1, 2)
def generate(self):
model_path = os.path.expanduser(self.model_path)
assert model_path.endswith('.h5'), 'Keras model or weights must be a .h5 file.'
# Load model, or construct model and load weights.
num_anchors = len(self.anchors)
num_classes = len(self.class_names)
is_tiny_version = num_anchors==6 # default setting
try:
self.yolo_model = load_model(model_path, compile=False)
except:
self.yolo_model = tiny_yolo_body(Input(shape=(None,None,3)), num_anchors//2, num_classes) \
if is_tiny_version else yolo_body(Input(shape=(None,None,3)), num_anchors//3, num_classes)
self.yolo_model.load_weights(self.model_path) # make sure model, anchors and classes match
else:
assert self.yolo_model.layers[-1].output_shape[-1] == \
num_anchors/len(self.yolo_model.output) * (num_classes + 5), \
'Mismatch between model and given anchor and class sizes'
print('{} model, anchors, and classes loaded.'.format(model_path))
# Generate colors for drawing bounding boxes.
hsv_tuples = [(x / len(self.class_names), 1., 1.)
for x in range(len(self.class_names))]
self.colors = list(map(lambda x: colorsys.hsv_to_rgb(*x), hsv_tuples))
self.colors = list(
map(lambda x: (int(x[0] * 255), int(x[1] * 255), int(x[2] * 255)),
self.colors))
np.random.seed(10101) # Fixed seed for consistent colors across runs.
np.random.shuffle(self.colors) # Shuffle colors to decorrelate adjacent classes.
np.random.seed(None) # Reset seed to default.
# Generate output tensor targets for filtered bounding boxes.
self.input_image_shape = K.placeholder(shape=(2, ))
if self.gpu_num>=2:
self.yolo_model = multi_gpu_model(self.yolo_model, gpus=self.gpu_num)
boxes, scores, classes = yolo_eval(self.yolo_model.output, self.anchors,
len(self.class_names), self.input_image_shape,
score_threshold=self.score, iou_threshold=self.iou)
return boxes, scores, classes
def detect_image(self, image):
start = timer()
if self.model_image_size != (None, None):
assert self.model_image_size[0]%32 == 0, 'Multiples of 32 required'
assert self.model_image_size[1]%32 == 0, 'Multiples of 32 required'
boxed_image = letterbox_image(image, tuple(reversed(self.model_image_size)))
else:
new_image_size = (image.width - (image.width % 32),
image.height - (image.height % 32))
boxed_image = letterbox_image(image, new_image_size)
image_data = np.array(boxed_image, dtype='float32')
print(image_data.shape)
image_data /= 255.
image_data = np.expand_dims(image_data, 0) # Add batch dimension.
out_boxes, out_scores, out_classes = self.sess.run(
[self.boxes, self.scores, self.classes],
feed_dict={
self.yolo_model.input: image_data,
self.input_image_shape: [image.size[1], image.size[0]],
K.learning_phase(): 0
})
print('Found {} boxes for {}'.format(len(out_boxes), 'img'))
font = ImageFont.truetype(font=r'你的绝对路径/FiraMono-Medium.otf',
#这个地方也很关键,当时就是没改这里导致查错查了好久
size=np.floor(3e-2 * image.size[1] + 0.5).astype('int32'))
thickness = (image.size[0] + image.size[1]) // 300
for i, c in reversed(list(enumerate(out_classes))):
predicted_class = self.class_names[c]
box = out_boxes[i]
score = out_scores[i]
label = '{} {:.2f}'.format(predicted_class, score)
draw = ImageDraw.Draw(image)
label_size = draw.textsize(label, font)
top, left, bottom, right = box
top = max(0, np.floor(top + 0.5).astype('int32'))
left = max(0, np.floor(left + 0.5).astype('int32'))
bottom = min(image.size[1], np.floor(bottom + 0.5).astype('int32'))
right = min(image.size[0], np.floor(right + 0.5).astype('int32'))
print(label, (left, top), (right, bottom))
if top - label_size[1] >= 0:
text_origin = np.array([left, top - label_size[1]])
else:
text_origin = np.array([left, top + 1])
# My kingdom for a good redistributable image drawing library.
for i in range(thickness):
draw.rectangle(
[left + i, top + i, right - i, bottom - i],
outline=self.colors[c])
draw.rectangle(
[tuple(text_origin), tuple(text_origin + label_size)],
fill=self.colors[c])
draw.text(text_origin, label, fill=(0, 0, 0), font=font)
del draw
end = timer()
print(end - start)
return image
def close_session(self):
self.sess.close()
def detect_video(yolo, video_path, output_path=""):
import cv2
vid = cv2.VideoCapture(video_path)
if not vid.isOpened():
raise IOError("Couldn't open webcam or video")
video_FourCC = int(vid.get(cv2.CAP_PROP_FOURCC))
video_fps = vid.get(cv2.CAP_PROP_FPS)
video_size = (int(vid.get(cv2.CAP_PROP_FRAME_WIDTH)),
int(vid.get(cv2.CAP_PROP_FRAME_HEIGHT)))
isOutput = True if output_path != "" else False
if isOutput:
print("!!! TYPE:", type(output_path), type(video_FourCC), type(video_fps), type(video_size))
out = cv2.VideoWriter(output_path, video_FourCC, video_fps, video_size)
accum_time = 0
curr_fps = 0
fps = "FPS: ??"
prev_time = timer()
while True:
return_value, frame = vid.read()
image = Image.fromarray(frame)
image = yolo.detect_image(image)
result = np.asarray(image)
curr_time = timer()
exec_time = curr_time - prev_time
prev_time = curr_time
accum_time = accum_time + exec_time
curr_fps = curr_fps + 1
if accum_time > 1:
accum_time = accum_time - 1
fps = "FPS: " + str(curr_fps)
curr_fps = 0
cv2.putText(result, text=fps, org=(3, 15), fontFace=cv2.FONT_HERSHEY_SIMPLEX,
fontScale=0.50, color=(255, 0, 0), thickness=2)
cv2.namedWindow("result", cv2.WINDOW_NORMAL)
cv2.imshow("result", result)
if isOutput:
out.write(result)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
yolo.close_session()
def detect_img(yolo):
while True:
img = input('Input image filename:')
try:
image = Image.open(img)
except:
print('Open Error! Try again!')
continue
else:
r_image = yolo.detect_image(image)
r_image.show()
yolo.close_session()
def main():
#img = input('输入路径')
image = Image.open(r'你图片的绝对路径')
yolo = YOLO()
r_image=yolo.detect_image(image)
r_image.show()
yolo里面的model.py和utils.py也要添加到项目下,里面没有什么修改的地方,yolo会调用这两个文件,只要注意导包的相对位置就好了,这里就不贴出来了。
此外,里面涉及到路径的地方一定都要改成绝对路径,否则会报错
thread.lock object at 0x000001DA121A1170