卡尔曼滤波与粒子滤波比较
两种滤波的重要性不必赘述,在自动控制领域的无异于牛顿的三大定律,都是贝叶斯滤波的不同表述和推广。
对卡尔曼滤波,[1]是状态估计的经典教材,它的第一章从简单的例子出发,深入浅出地解释什么是滤波,为什么卡尔曼滤波是最优的;粒子滤波强烈推荐[3], 这篇论文详细的介绍了例子滤波的发展历程和各类变种,最有用的是有人根据这篇论文实现了代码[3];[4]是博士论文的节选,从编程的角度介绍了粒子滤波如何应用到移动机器人定位。
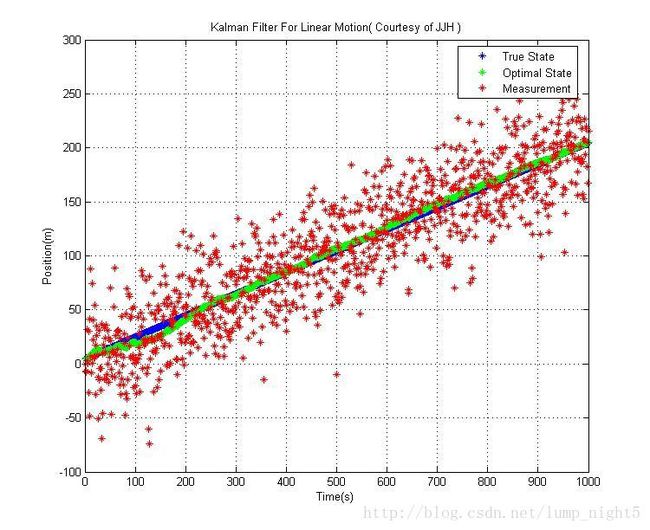
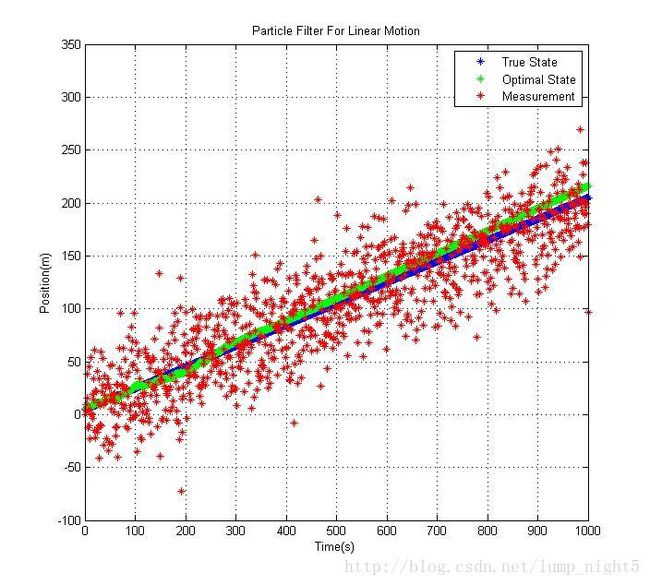
采用简单的线性模型,[ x vx y vy]'为状态变量,观测量是位置[ x y ]',跟踪位置x的结果如下,注意到KF要比PF的跟踪效果好(PF的RMS大概是KF的四倍),这是因为从误差最小的原则来讲,Kalman Filter是最优的。
源代码:
Kalman Filter
%% Lucas Wang, XJTU, 2014.09.18, and I appreciate for the protype code offering by my girl friend, I love her very much~
clc;clear all;close all;
%% parameter of state equation
T = 0.01;
F=[1 T 0 0;
0 1 0 0;
0 0 1 T;
0 0 0 1];
G=[T^2/2 0;
T 0;
0 T^2/2;
0 T];
Q = diag( [0.04 0.09] );
%parameter of measurement equation
H=[1 0 0 0;
0 0 1 0];
R=diag([900 900]);
% Initialization of state estimators
x0=[5 20 6 18]';
% P0=diag( [400 64 625 49] );
L = 30;
P0 = diag( [ L L L L ]);
StateDim = size( F, 1 );
ObvDim = size( H, 1 );
% reset the random number generator to a different state each time
randn('state',sum(100*clock));
% %% Kalman Filter.
x_True = [ x0 ];
x_Noise = [ x0 ];
x_Predict = [ x0 ];
x_Est = [ x0 ];
z_True = [];
z_Noise = [];
P_Predict = [];
P_Est( :, :, 1 ) = P0;
MaxIter = 1000;
for k = 2 : 1 : MaxIter
% ground truth.
x_True( :, k ) = F * x_True( :, k - 1 );
Z_True( :, k ) = H * x_True(:, k );
% Add noise.
Wk = G * sqrtm(Q) * randn( 2, 1 );
x_Noise( :, k ) = F * x_Noise( :, k - 1 ) + Wk;
Vk = sqrtm(R)*randn( 2, 1 );
z_Noise( :, k ) = H * x_Noise( :, k ) + Vk;
% Predicate.
x_Predict( :, k ) = F * x_Est( :, k - 1 );
P_Predict( :, :, k ) = F * P_Est( :, :, k - 1 ) * F' + G * Q * G';
% Update.
y(:, k ) = z_Noise( :, k ) - H * x_Predict( :, k );
S(:, :, k ) = H * P_Predict( :, :, k ) * H' + R;
K( :, :, k ) = P_Predict( :, :, k ) * H' * inv( S( :, :, k ) );
x_Est(:, k ) = x_Predict( :, k ) + K( :, :, k ) * y( :, k );
P_Est( :, :, k ) = ( eye(StateDim) - K( :, :, k ) * H ) * P_Predict( :, :, k );
end
RMS = mean( ( x_Est - x_True ).^2, 2 )
%% Visualize.
figure(2);
plot( x_True( 1, : ), 'b*' );
hold on;plot( x_Est( 1, : ), 'g*' );
hold on; plot( z_Noise( 1, : ), 'r*' );
legend('True State', 'Optimal State', 'Measurement' );
title( ' Kalman Filter For Linear Motion( Courtesy of JJH ) ');
xlabel('Time(s)');ylabel( 'Position(m)' );
grid on;
%% Lucas Wang, XJTU, 2014.09.18
clc;clear all;close all;
% parameter of state equation
T = 0.01;
F=[1 T 0 0;
0 1 0 0;
0 0 1 T;
0 0 0 1];
G=[T^2/2 0;
T 0;
0 T^2/2;
0 T];
Q = diag( [0.04 0.09] );
%parameter of measurement equation
H=[1 0 0 0;
0 0 1 0];
R=diag([900 900]);
% Initialization of state estimators
x0=[5 20 6 18]';
% P0=diag( [400 64 625 49] );
L = 30;
P0 = diag( [ L L L L ]);
StateDim = size( F, 1 );
ObvDim = size( H, 1 );
% %% Kalman Filter.
x_True = [ x0 ];
x_Noise = [ x0 ];
z_True = [];
z_Noise = [];
%% Particle Filter.
TotalTime = 1000;
nx = StateDim;
% function description.
sys = @(k, xkm1, uk) F * xkm1 + uk;
obs = @(k, zkm1, vk) H * zkm1 + vk;
p_yk_given_xk = @( k, yk, xk ) mvnpdf( yk - H * xk, zeros( ObvDim, 1 ), R ); % associate with weight calculate.
gen_x0 = @(x) mvnrnd( x0, P0 );
gen_sys_noise = @(u) ( mvnrnd( zeros( StateDim, 1 ), G * Q * G' ) )';
gen_obs_noise = @(u) ( mvnrnd( zeros( ObvDim, 1 ), R ) )';
% initialization of particle filter.
pf.k = 1; % initial iteration number
pf.Ns = 100; % number of particles
pf.w = zeros(pf.Ns, TotalTime); % weights
pf.particles = zeros( nx, pf.Ns, TotalTime ); % particles
pf.gen_x0 = gen_x0; % function for sampling from initial pdf p_x0
pf.p_yk_given_xk = p_yk_given_xk; % function of the observation likelihood PDF p(y[k] | x[k])
pf.gen_sys_noise = gen_sys_noise; % function for generating system noise
% Estimate state
for k = 2:TotalTime
fprintf( 'Iteration = %d/%d\n',k, TotalTime );
x_True( :, k ) = sys( k, x_True(:, k - 1 ), 0 );
Z_True( :, k ) = obs( k, x_True(:, k - 1 ), 0 );
% Add noise.
Wk = gen_sys_noise();
x_Noise( :, k ) = sys( k, x_True(:, k - 1 ), Wk );
Vk = gen_obs_noise();
z_Noise( :, k ) = obs( k, x_True(:, k - 1 ), Vk );
% state estimation
pf.k = k;
%[xh(:,k), pf] = particle_filter(sys, y(:,k), pf, 'multinomial_resampling');
[xh(:,k), pf] = particle_filter( sys, z_Noise( :, k ), pf, 'systematic_resampling' );
% filtered observation
yh(:,k) = obs(k, xh(:,k), 0);
end
RMS = mean( ( xh - x_True ).^2, 2 )
figure;
plot( x_True( 1, : ), 'b*' );
hold on;plot( xh( 1, : ), 'g*' );
hold on; plot( z_Noise( 1, : ), 'r*' );
legend('True State', 'Optimal State', 'Measurement' );
title( 'Particle Filter For Linear Motion' );xlabel('Time(s)'); ylabel('Position(m)');grid on;
参考文献:
[1] Maybeck, Stochastic Models, Estimation, and Control.
[2] M. Sanjeev Arulampalam, A turtorial on Particle Filters for online Nonlinear/Non-Gaussian Bayesian Tracking[J], IEEE Transactions on Signal Processing, 2002.
[3] 点击打开链接
[4] Ioannis M. Rekleitis, A Particle Filter Tutorial for Mobile Robot Localization, Technical Report of Centre for Intelligent Machines, McGill University, 2004.
ps: 特别感谢韩姑娘在卡尔曼滤波上对我的帮助,和她的讨论让我对KF的理解更加深刻,而且Kalman Filter部分的代码也是她提供的。