INS/GNSS组合导航(四)卡尔曼滤波比较之KF、EKF、UKF
1.摘要
卡尔曼滤波自1960年代发表至今,在各个时间序列估计领域尤其是位置估计、惯性导航等得到了广泛的应用,后续逐渐演化出EKF、UKF以及PF,其中PF本文不作展开对比,重点对比KF、EKF与UKF的差异及演化来历。
2.卡尔曼滤波由来
卡尔曼滤波(Kalman Filter)是一种高效的自回归滤波器,它能在诸多不确定性情况的组合信息中估计动态系统的状态,是一种强大的、通用性极强的工具。由鲁道夫.E.卡尔曼于1961年前后首次提出,并首先应用于阿波罗计划的轨道预测。
3.卡尔曼滤波器原理
卡尔曼滤波模型假设k时刻的真实状态是从(k − 1)时刻的状态演化而来,符合下式:
![]()
其中
 是作用在
是作用在 上的状态变换模型(变换矩阵)。
上的状态变换模型(变换矩阵)。 是作用在控制器向量
是作用在控制器向量 上的输入-控制模型。
上的输入-控制模型。 是过程噪声,并假定其符合均值为零,协方差矩阵为
是过程噪声,并假定其符合均值为零,协方差矩阵为 的多元正态分布。
的多元正态分布。
![]()
时刻k,对真实状态![]() 的一个测量
的一个测量![]() 满足下式:
满足下式:
![]()
其中![]() 是观测模型,它把真实状态空间映射成观测空间,
是观测模型,它把真实状态空间映射成观测空间,![]() 是观测噪声,其均值为零,协方差矩阵为
是观测噪声,其均值为零,协方差矩阵为![]() ,且服从正态分布。
,且服从正态分布。
![]()
初始状态以及每一时刻的噪声![]() 都认为是互相独立的,即协方差矩阵非对角元素全部为0。
都认为是互相独立的,即协方差矩阵非对角元素全部为0。
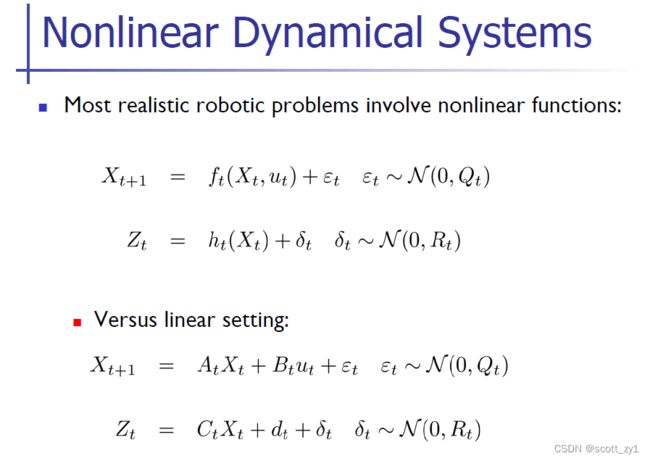
实际上,很多真实世界的动态系统都并不确切的符合这个模型;但由于卡尔曼滤波器被设计在有噪声的情况下工作,一个近似的符合已经可以使这个滤波器非常有用了,实际应用发现,对于并不完全符合上述模型的动态系统也能得到较好的近似效果。更多其它更复杂的卡尔曼滤波器的变种,在下边讨论中会有具体描述。
4.扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)
4.1 直观差异
对于KF、EKF、UKF的主要差异,通俗一点说,主要如下:
卡尔曼滤波器 KF 是一种用作最小二乘误差优化器的滤波器,为了使其工作,在滤波器内部考虑的系统必须是线性的,即基于线性系统的前提假设。
为了使用KF对非线性系统进行状态估计或参数估计,一种可能的方法是围绕其当前状态对正在研究的系统进行线性化,并强制滤波器使用系统的这个线性化版本作为模型. 这是Extended Kalman Filter,或简称为EKF。
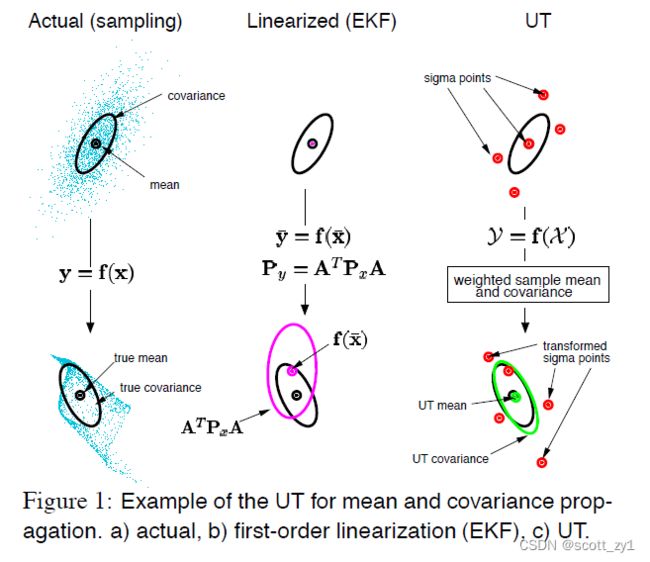
然而,由于EKF 不是很稳定,而且很多时候,当它确实收敛到“正确”解时,其收敛过程会非常缓慢。为了改进这个滤波器的固有不足,一些作者开始使用 Unscented Transformation,而不是使用线性化来预测被研究系统的行为。因此,具有 Unscented 变换(无迹变换)的 Kalman 滤波器称为 Unscented Kalman Filter,或简称为 UKF。
与 EKF 相比,UKF具有一些优势,因为 Unscented 变换在某种程度上比线性化更好地描述了非线性系统,因此该滤波器更迅速地收敛到正确的解。而使用 EKF,这个滤波器可能会变得不稳定,结果可能会出现偏差。
核心差异总结如下:
KF: 线性化假设,求解线性系统,对应的是线性模型
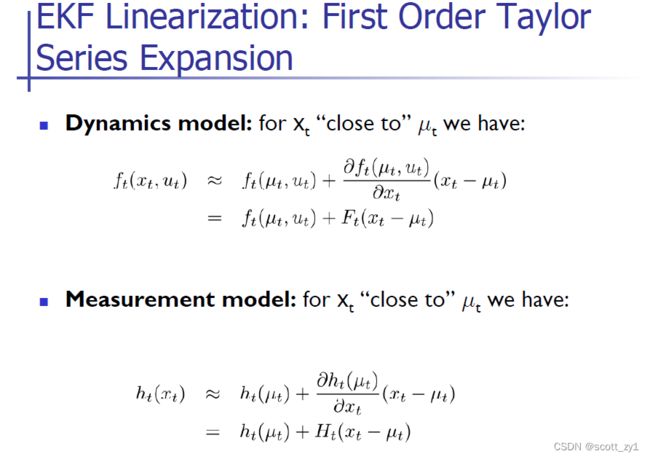
EKF: 求解对象是非线性系统,通过Taylor展开式,舍去高阶项,基于线性化思想来近似线性化
UKF: 采用线性化近似很多高度非线性系统不合时宜,基于无迹变换,求解得到高斯分布来规避了线性化的行为,UKF的实现具体可分为以下几个步骤:
a) Compute a set of sigma points
b) Each sigma points has a weight
c) Transform the point through the nonlinear function
d) Compute a Gaussian from weighted points
| 模型 | 适用对象 | 求解方法 | 计算复杂度/计算速度 |
| KF | 线性系统、线性模型 | 直接求解 | 容易/快 |
| EKF | 一般非线性系统 | Taylor展开式 | 一般/略慢于KF |
| UKF | 高度非线性系统 | 无迹变换、高斯分布 | 复杂/略慢于EKF |
4.2 算法差异
4.2.1 KF与EKF的算法差异
对于KF,本质上来说,它是贝叶斯滤波器的一个特例,即这个滤波器是动力学模型和测量模型的一个线性组合。


通过上述对比可知,KF模型的状态转移矩阵具有线性化特点,体现在系数矩阵![]() ,
,
而对于EKF模型来说,状态转移对应下一时刻的状态量是上一时刻的非线性函数,不能直接得到![]() ,需对
,需对![]() 采用一阶Taylor系列展开式来近似。
采用一阶Taylor系列展开式来近似。

4.2.2 EKF 与UKF的算法差异
上述EKF中通过非线性函数的一阶Taylor展开式实现线性化,而在UKF则不再采用这种简单的一阶线性化,原因在于对于高度非线性系统,这种舍去二阶以上的线性化处理并不合适,那么从EKF到UKF,最终使得效果好于EKF的直觉在哪里呢?具体可见如下的对比。

由上可知,在UKF中,不再使用函数的线性近似,而是直接使用了函数本身,但是对函数的自变量![]() 也就是数据点的协方差进行近似。直观对比EKF与UKF在算法实现上的差异如下:
也就是数据点的协方差进行近似。直观对比EKF与UKF在算法实现上的差异如下:

对于UKF的均值与协方差的更新过程详细步骤如下:

上述详细算法步骤第12步对应的推导过程如下:

UKF vs. EKF
—— Same results as EKF for linear models
—— Better approximation than EKF for non-linear models—— Differences often “somewhat small”
—— No Jacobians needed for the UKF
—— Same complexity class
—— Slightly slower than the EKF
—— Still requires Gaussian distributions
4.2.3总结 KF/EKF、UKF算法实现差异
5. 完整推导
6. 参考文献
1.Applied Mathematics in Integrated Navigation Systems 3rd-AIAA
2.Strapdown Inertial Navigation Technology,2nd.
3.Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems,(2008)
4.Optimal Estimation of Dynamic Systems, Second Edition
5. A New Extension of the Kalman Filter to Nonlinear Systems
6. Probabilistic Robotics
7.The Unscented Kalman Filter for Nonlinear Estimation