ROS中的TF坐标变换工具及实现、Rviz查看(十四)C++、python
目录
TF坐标变换引言
概述
概念
坐标msg消息
简介
geometry_msgs/TransformStamped
geometry_msgs/PointStamped
静态坐标变换
简介
C++
创建功能包
发布方编码
RVIZ启动发布方可视化
启动
使用说明
订阅方编码
python实现
发布方编码
订阅方编码
命令行发布
动态坐标系
C++
发布方实现
用Rviz来看
订阅方实现
Python
发布方
订阅方
多坐标变换
引言
launch
C++
发布方
订阅方
python
发布方
订阅方
坐标系关系查看
准备
使用
TF坐标变换实操
引言
准备工作:
C++
准备工作
生成小乌龟
发布两只乌龟坐标
订阅方实现解析坐标信息并生成速度信息
Python实现
小结
TF2与TF
1.TF2与TF比较_简介
2.TF2与TF比较_静态坐标变换演示
roslaunch turtle_tf2 turtle_tf2_demo_cpp.launch或roslaunch turtle_tf2 turtle_tf2_demo.launch通过以上内置命令可以实现

黄色的报错是因为软链接的问题
TF坐标变换引言
概述
应用场景
机器人系统上,有多个传感器,如激光雷达、摄像头等,有的传感器是可以感知机器人周边的物体方位(或者称之为:坐标,横向、纵向、高度的距离信息)的,以协助机器人定位障碍物,可以直接将物体相对该传感器的方位信息,等价于物体相对于机器人系统或机器人其它组件的方位信息吗?显示是不行的,这中间需要一个转换过程。更具体描述如下:
例子:
场景1:雷达与小车
现有一移动式机器人底盘,在底盘上安装了一雷达,雷达相对于底盘的偏移量已知,现雷达检测到一障碍物信息,获取到坐标分别为(x,y,z),该坐标是以雷达为参考系的,如何将这个坐标转换成以小车为参考系的坐标呢?

现在已知雷达(base_laser)相对于障碍物的距离,通过tf坐标变换可以转换为障碍物跟小车之间的距离。
场景2:
现有一带机械臂的机器人(比如:PR2)需要夹取目标物,当前机器人头部摄像头可以探测到目标物的坐标(x,y,z),不过该坐标是以摄像头为参考系的,而实际操作目标物的是机械臂的夹具,当前我们需要将该坐标转换成相对于机械臂夹具的坐标,这个过程如何实现?

当然,根据我们高中学习的知识,
在明确了不同坐标系之间的的相对关系,就可以实现任何坐标点在不同坐标系之间的转换,
但是该计算实现是较为常用的,且算法也有点复杂,因此在 ROS 中直接封装了相关的模块: 坐标变换(TF)。
概念
tf:TransForm Frame,坐标变换
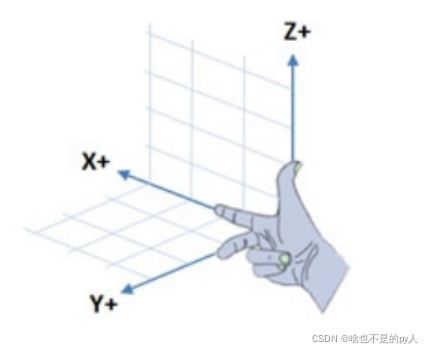
坐标系:ROS 中是通过坐标系统开标定物体的,确切的将是通过右手坐标系来标定的。
右手坐标系:手掌垂直地面,拇指向上,然后坐标系标定如下图所示
作用
在 ROS 中用于实现不同坐标系之间的点或向量的转换。
说明
在ROS中坐标变换最初对应的是tf,不过在 hydro 版本开始, tf 被弃用,迁移到 tf2,后者更为简洁高效,tf2对应的常用功能包有:
tf2_geometry_msgs:可以将ROS消息转换成tf2消息。
tf2: 封装了坐标变换的常用消息。(包含四元数,实际上就是欧拉角(翻滚,桶滚,偏转))
tf2_ros:为tf2提供了roscpp和rospy绑定,封装了坐标变换常用的API。
坐标msg消息
简介
订阅发布模型中数据载体 msg 是一个重要实现,首先需要了解一下,
在坐标转换实现中常用的 msg:
geometry_msgs/TransformStamped和geometry_msgs/PointStamped前者用于传输坐标系相关位置信息,后者用于传输某个坐标系内坐标点的信息。
在坐标变换中,频繁的需要使用到坐标系的相对关系以及坐标点信息。
geometry_msgs/TransformStamped
这个其实就是用来描述坐标系之间的变换关系的
命令行键入:rosmsg info geometry_msgs/TransformStamped
std_msgs/Header header #头信息
uint32 seq #|-- 序列号
time stamp #|-- 时间戳
string frame_id #|-- 坐标 ID
string child_frame_id #子坐标系的 id
geometry_msgs/Transform transform #坐标信息
geometry_msgs/Vector3 translation #偏移量
float64 x #|-- X 方向的偏移量
float64 y #|-- Y 方向的偏移量
float64 z #|-- Z 方向上的偏移量
geometry_msgs/Quaternion rotation #四元数
float64 x
float64 y
float64 z
float64 w

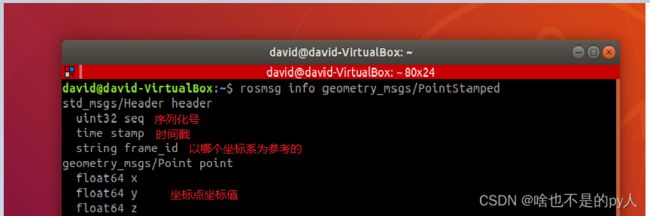
geometry_msgs/PointStamped
命令行键入:rosmsg info geometry_msgs/PointStamped
std_msgs/Header header #头
uint32 seq #|-- 序号
time stamp #|-- 时间戳
string frame_id #|-- 所属坐标系的 id
geometry_msgs/Point point #点坐标
float64 x #|-- x y z 坐标
float64 y
float64 z
静态坐标变换
简介
所谓静态坐标变换,是指两个坐标系之间的相对位置是固定的。
比如说小车底盘和雷达之间的关系就是静态坐标变换
需求描述:
现有一机器人模型,核心构成包含主体与雷达,各对应一坐标系,坐标系的原点分别位于主体与雷达的物理中心,已知雷达原点相对于主体原点位移关系如下: x 0.2 y0.0 z0.5。当前雷达检测到一障碍物,在雷达坐标系中障碍物的坐标为 (2.0 3.0 5.0),请问,该障碍物相对于主体的坐标是多少?
实现分析:
- 坐标系相对关系,可以通过发布方发布
- 订阅方,订阅到发布的坐标系相对关系,再传入坐标点信息(可以写死),然后借助于 tf 实现坐标变换,并将结果输出
实现流程:C++ 与 Python 实现流程一致
- 新建功能包,添加依赖
- 编写发布方实现
- 编写订阅方实现
- 执行并查看结果
C++
创建功能包
具体步骤这个
(12条消息) ros集成开发环境搭建(三)c++、python_啥也不是的py人的博客-CSDN博客 https://blog.csdn.net/weixin_50920579/article/details/123417706
https://blog.csdn.net/weixin_50920579/article/details/123417706 
然后


然后选择依赖

创建完后编译一下,防止导入依赖有错
ctrl+shift+b
![]()

编译通过
发布方编码
新建文件

配置CMakeLists
ctrl+/是解开注释
写入代码
/*
静态坐标变换发布方:
发布关于 laser 坐标系的位置信息
实现流程:
1.包含头文件
2.初始化 ROS 节点
3.创建静态坐标转换广播器
4.创建坐标系信息
5.广播器发布坐标系信息
6.spin()
*/
// 1.包含头文件
#include "ros/ros.h"
#include "tf2_ros/static_transform_broadcaster.h"
#include "geometry_msgs/TransformStamped.h"
#include "tf2/LinearMath/Quaternion.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"static_brocast");
// 3.创建静态坐标转换广播器
tf2_ros::StaticTransformBroadcaster broadcaster;
// 4.创建坐标系信息
geometry_msgs::TransformStamped ts;
//----设置头信息
ts.header.seq = 100;
ts.header.stamp = ros::Time::now();
ts.header.frame_id = "base_link";
//----设置子级坐标系
ts.child_frame_id = "laser";
//----设置子级相对于父级的偏移量
ts.transform.translation.x = 0.2;
ts.transform.translation.y = 0.0;
ts.transform.translation.z = 0.5;
//----设置四元数:将 欧拉角数据转换成四元数
tf2::Quaternion qtn;//创建四元数对象
qtn.setRPY(0,0,0);//向该对象设置欧拉角,这个对象可以将欧拉角转换成四元数
//注意此处是弧度值,比如说设置3.14就是绕着对应轴转了一圈
ts.transform.rotation.x = qtn.getX();
ts.transform.rotation.y = qtn.getY();
ts.transform.rotation.z = qtn.getZ();
ts.transform.rotation.w = qtn.getW();
// 5.广播器发布坐标系信息
broadcaster.sendTransform(ts);
ros::spin();
return 0;
}
编译一下
没问题就可以终端实现

可以看出打印出了对应消息
RVIZ启动发布方可视化
启动
rviz是ros内置的图形化界面
启动rviz之前要启动roscore
和对应的发布方
也可以通过图形化的方式查看

左键是拖拽
滚轮是放大缩小
使用说明
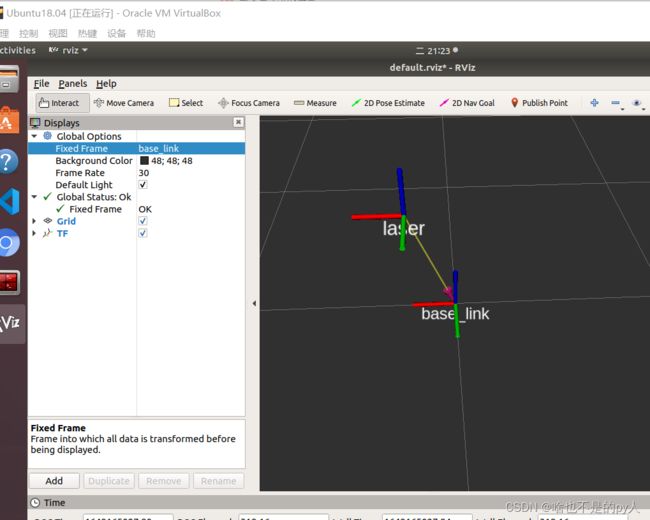
坐标系选择就是之前编码里的

这里我们设置成base_link
然后错误提示就没了

然后是看坐标系之间的相互关系
这里是点击左下方的add按钮

选择TF
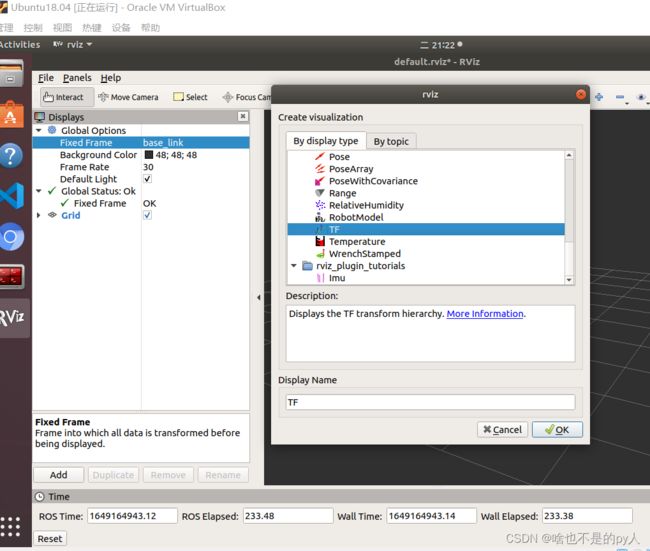
蓝色是z轴
红色是x轴
绿色是y轴
在终端里ctrl +c关闭rviz
订阅方编码
新建文件并配置

复制以下代码
/*
订阅坐标系信息,生成一个相对于 子级坐标系的坐标点数据,转换成父级坐标系中的坐标点
实现流程:
1.包含头文件
2.初始化 ROS 节点
3.创建 TF 订阅节点
4.生成一个坐标点(相对于子级坐标系)
5.转换坐标点(相对于父级坐标系)调用tf实现
6.spin()
*/
//1.包含头文件
#include "ros/ros.h"
#include "tf2_ros/transform_listener.h"//订阅数据
#include "tf2_ros/buffer.h"//订阅的数据缓存到buffer中
#include "geometry_msgs/PointStamped.h"
#include "tf2_geometry_msgs/tf2_geometry_msgs.h" //注意: 调用 transform 必须包含该头文件
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"tf_sub");
ros::NodeHandle nh;
// 3.创建 TF 订阅节点
tf2_ros::Buffer buffer;//创建一个buffer缓存
tf2_ros::TransformListener listener(buffer);//再创建订阅对象
/*
调用了buffer的转换函数 transform
参数一:被转换的坐标点
参数二:目标坐标系
返回值:输出的坐标点
*/
ros::Rate r(1);
while (ros::ok())
{
// 4.生成一个坐标点(相对于子级坐标系)
geometry_msgs::PointStamped point_laser;
point_laser.header.frame_id = "laser";//相对坐标系设置为雷达
point_laser.header.stamp = ros::Time::now();
point_laser.point.x = 1;
point_laser.point.y = 2;
point_laser.point.z = 7.3;
// 5.转换坐标点(相对于父级坐标系)
//新建一个坐标点,用于接收转换结果
//--------------使用 try 语句或休眠,否则可能由于缓存接收延迟而导致坐标转换失败------------------------
try
{
geometry_msgs::PointStamped point_base;
point_base = buffer.transform(point_laser,"base_link");
ROS_INFO("转换后的数据:(%.2f,%.2f,%.2f),参考的坐标系是:",point_base.point.x,point_base.point.y,point_base.point.z,point_base.header.frame_id.c_str());
}
catch(const std::exception& e)
{
// std::cerr << e.what() << '\n';
ROS_INFO("程序异常.....");
}
r.sleep();
ros::spinOnce();
}
return 0;
}
编译通过后终端执行
如果此处出现异常
那是因为还没订阅到base_link就开始转换了
加一个休眠操作就行

python实现
发布方编码
新建文件并且配置
复制以下代码
#! /usr/bin/env python
"""
静态坐标变换发布方:
发布关于 laser 坐标系的位置信息
实现流程:
1.导包
2.初始化 ROS 节点
3.创建 静态坐标广播器
4.创建并组织被广播的消息
5.广播器发送消息
6.spin
"""
# 1.导包
import rospy
import tf2_ros
import tf
from geometry_msgs.msg import TransformStamped
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("static_tf_pub_p")
# 3.创建 静态坐标广播器
broadcaster = tf2_ros.StaticTransformBroadcaster()
# 4.创建并组织被广播的消息
tfs = TransformStamped()
# --- 头信息
tfs.header.frame_id = "world"
tfs.header.stamp = rospy.Time.now()
tfs.header.seq = 101
# --- 子坐标系
tfs.child_frame_id = "radar"
# --- 坐标系相对信息
# ------ 偏移量
tfs.transform.translation.x = 0.2
tfs.transform.translation.y = 0.0
tfs.transform.translation.z = 0.5
# ------ 四元数
qtn = tf.transformations.quaternion_from_euler(0,0,0)
#从欧拉角转换成四元数,然后直接对应读取
tfs.transform.rotation.x = qtn[0]
tfs.transform.rotation.y = qtn[1]
tfs.transform.rotation.z = qtn[2]
tfs.transform.rotation.w = qtn[3]
# 5.广播器发送消息
broadcaster.sendTransform(tfs)
# 6.spin
rospy.spin()
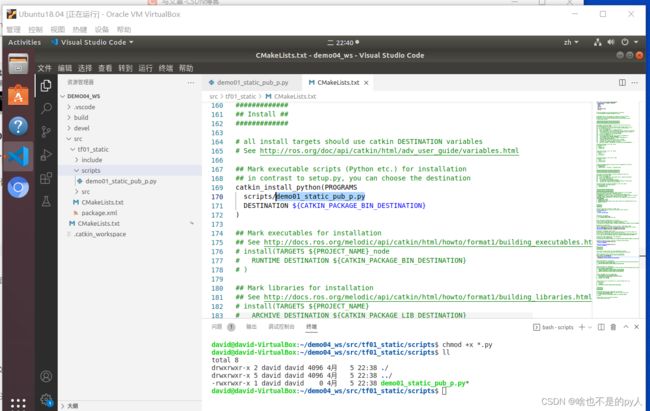
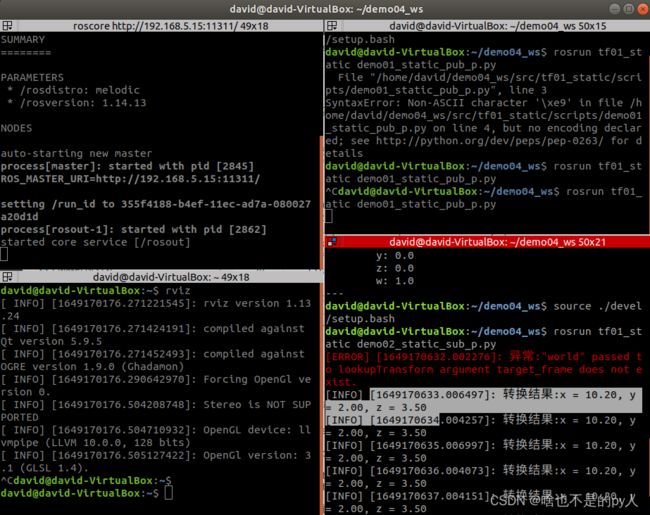
然后保存终端运行
或者通过rviz看

订阅方编码
新建文件配置好并且授予运行权限
#! /usr/bin/env python
"""
订阅坐标系信息,生成一个相对于 子级坐标系的坐标点数据,
转换成父级坐标系中的坐标点
实现流程:
1.导包
2.初始化 ROS 节点
3.创建 TF 订阅对象
4.创建一个 radar 坐标系中的坐标点
5.调研订阅对象的 API 将 4 中的点坐标转换成相对于 world 的坐标
6.spin
"""
# 1.导包
import rospy
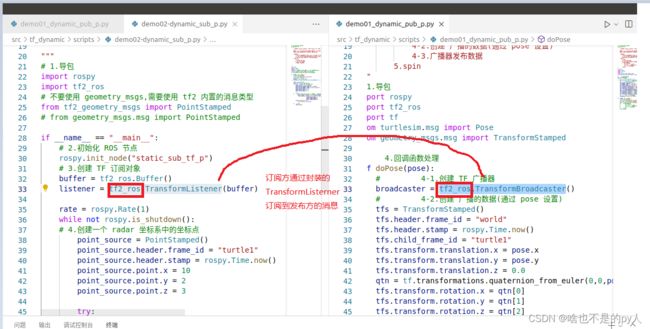
import tf2_ros
# 不要使用 geometry_msgs,需要使用 tf2 内置的消息类型
from tf2_geometry_msgs import PointStamped
# from geometry_msgs.msg import PointStamped
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("static_sub_tf_p")
# 3.创建 TF 订阅对象
buffer = tf2_ros.Buffer()#创建缓存对象
listener = tf2_ros.TransformListener(buffer)#创建订阅对象(将缓存传入)
rate = rospy.Rate(1)
while not rospy.is_shutdown():
# 4.创建一个 radar 坐标系中的坐标点
point_source = PointStamped()
point_source.header.frame_id = "radar"
point_source.header.stamp = rospy.Time.now()
point_source.point.x = 10
point_source.point.y = 2
point_source.point.z = 3
try:
# 5.调研订阅对象的 API 将 4 中的点坐标转换成相对于 world 的坐标
point_target = buffer.transform(point_source,"world")#转换实现
rospy.loginfo("转换结果:x = %.2f, y = %.2f, z = %.2f",
point_target.point.x,
point_target.point.y,
point_target.point.z)
except Exception as e:
rospy.logerr("异常:%s",e)
# 6.spin
rate.sleep()
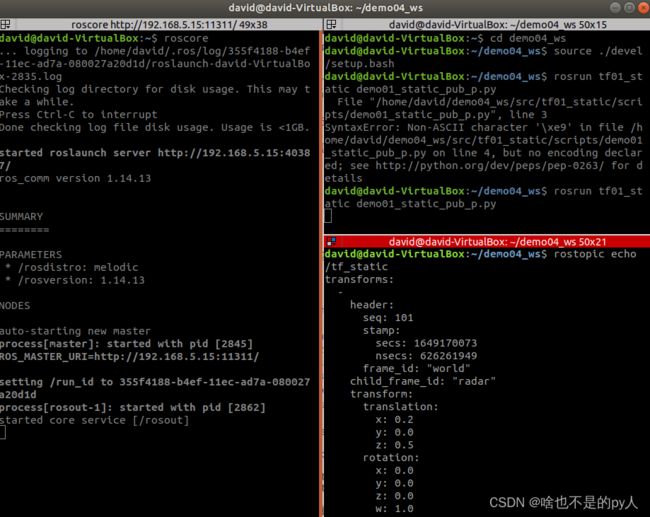
实现
命令行发布

发布成功
当坐标系之间的相对位置固定时,那么所需参数也是固定的: 父系坐标名称、子级坐标系名称、x偏移量、y偏移量、z偏移量、x 翻滚角度、y俯仰角度、z偏航角度,实现逻辑相同,参数不同,那么 ROS 系统就已经封装好了专门的节点,使用方式如下:
rosrun tf2_ros static_transform_publisher x偏移量 y偏移量 z偏移量 z偏航角度 y俯仰角度 x翻滚角度 父级坐标系 子级坐标系
示例:rosrun tf2_ros static_transform_publisher 0.2 0 0.5 0 0 0 /baselink /laser
也建议使用该种方式直接实现静态坐标系相对信息发布。
这个方法里的父级坐标系默认为原点
可以借助于rviz显示坐标系关系,具体操作:
- 新建窗口输入命令:rviz;
- 在启动的 rviz 中设置Fixed Frame 为 base_link;
- 点击左下的 add 按钮,在弹出的窗口中选择 TF 组件,即可显示坐标关系。
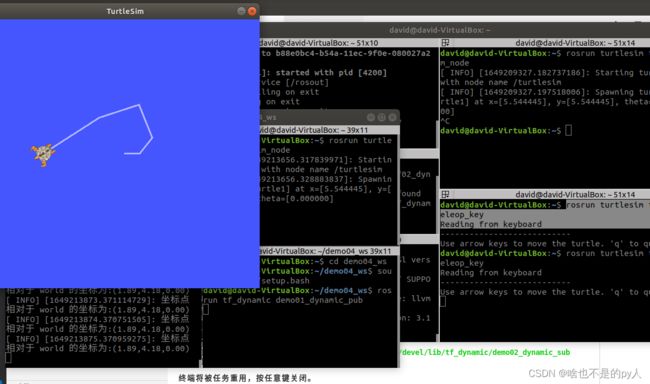
动态坐标系
所谓动态坐标变换,是指两个坐标系之间的相对位置是变化的
需求描述:
启动 turtlesim_node,该节点中窗体有一个世界坐标系(左下角为坐标系原点),乌龟是另一个坐标系,键盘控制乌龟运动,将两个坐标系的相对位置动态发布。
实现分析:
-
乌龟本身不但可以看作坐标系,也是世界坐标系中的一个坐标点
-
订阅 turtle1/pose,可以获取乌龟在世界坐标系的 x坐标、y坐标、偏移量以及线速度和角速度
-
将 pose 信息转换成 坐标系相对信息并发布
实现流程:C++ 与 Python 实现流程一致
-
新建功能包,添加依赖
-
创建坐标相对关系发布方(同时需要订阅乌龟位姿信息)
-
创建坐标相对关系订阅方
-
执行
C++
发布方实现
创建功能包
创建完之后编译一下防止依赖输入错误
新建文件并完成配置
复制以下代码
/*
动态的坐标系相对姿态发布(一个坐标系相对于另一个坐标系的相对姿态是不断变动的)
需求: 启动 turtlesim_node,该节点中窗体有一个世界坐标系(左下角为坐标系原点),乌龟是另一个坐标系,键盘
控制乌龟运动,将两个坐标系的相对位置动态发布
实现分析:
1.乌龟本身不但可以看作坐标系,也是世界坐标系中的一个坐标点
2.订阅 turtle1/pose,可以获取乌龟在世界坐标系的 x坐标、y坐标、偏移量以及线速度和角速度
3.将 pose 信息转换成 坐标系相对信息并发布
实现流程:
1.包含头文件
2.初始化 ROS 节点
3.创建 ROS 句柄
4.创建订阅对象
5.回调函数处理订阅到的数据(实现TF广播)
5-1.创建 TF 广播器
5-2.创建 广播的数据(通过 pose 设置)
5-3.广播器发布数据
6.spin
*/
// 1.包含头文件
#include "ros/ros.h"
#include "turtlesim/Pose.h"
#include "tf2_ros/transform_broadcaster.h"
#include "geometry_msgs/TransformStamped.h"
#include "tf2/LinearMath/Quaternion.h"
void doPose(const turtlesim::Pose::ConstPtr& pose){//回调函数
// 5-1.创建 TF 广播器
static tf2_ros::TransformBroadcaster broadcaster;//调用tf2库设置静态的发布对象
// 5-2.创建 广播的数据(通过 pose 设置)
geometry_msgs::TransformStamped tfs;
// |----头设置
tfs.header.frame_id = "world";
tfs.header.stamp = ros::Time::now();
// |----坐标系 ID
tfs.child_frame_id = "turtle1";
// |----坐标系相对信息设置
tfs.transform.translation.x = pose->x;//从pose中获取的
tfs.transform.translation.y = pose->y;//从pose中获取的
tfs.transform.translation.z = 0.0; // 二维实现,pose 中没有z,z 是 0
// |--------- 四元数设置
tf2::Quaternion qtn;
qtn.setRPY(0,0,pose->theta);//位姿信息中无四元数但是有偏航角度,因为乌龟是2d的
tfs.transform.rotation.x = qtn.getX();
tfs.transform.rotation.y = qtn.getY();
tfs.transform.rotation.z = qtn.getZ();
tfs.transform.rotation.w = qtn.getW();
// 5-3.广播器发布数据
broadcaster.sendTransform(tfs);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"dynamic_tf_pub");
// 3.创建 ROS 句柄
ros::NodeHandle nh;
// 4.创建订阅对象
ros::Subscriber sub = nh.subscribe("/turtle1/pose",1000,doPose);
// 5.回调函数处理订阅到的数据(实现TF广播)
//
// 6.spin
ros::spin();
return 0;
}
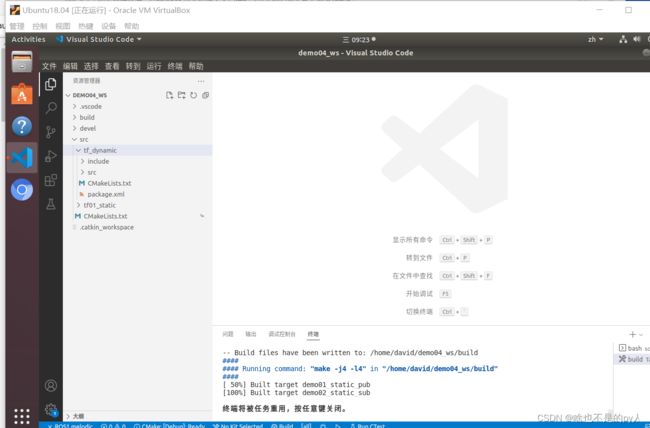
编写完之后编译一下
启动终端
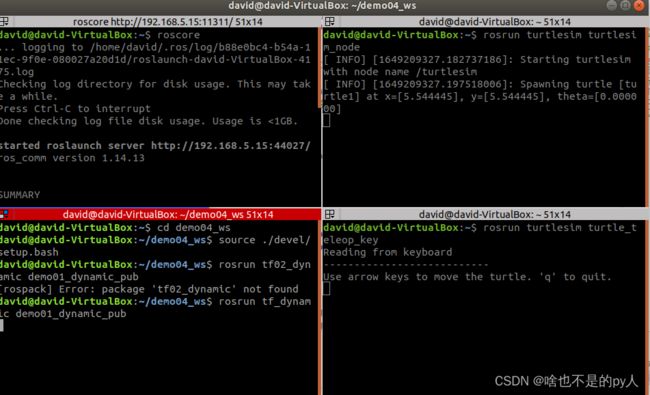

实际上是订阅/turtle1/pose话题的消息
然后对这个订阅到的消息用回调函数处理
然后用tf内置的话题/tf发布消息
用Rviz来看
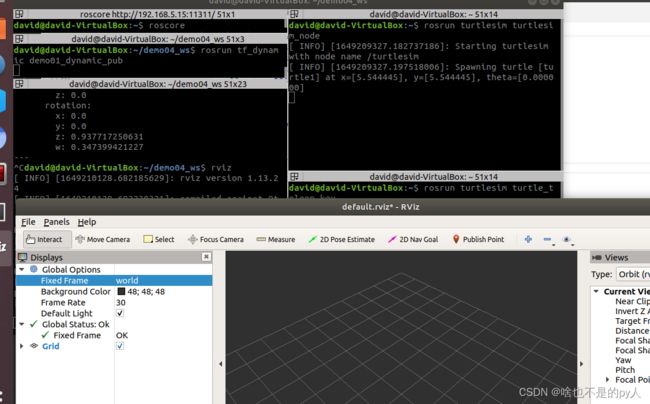
控制乌龟运动
rviz里的坐标系发生偏移
订阅方实现
订阅方实际上就是给一个点
然后给出这个点基于运动坐标系的坐标
算出基于世界坐标系的坐标
新建文件并且配置

复制代码
//1.包含头文件
#include "ros/ros.h"
#include "tf2_ros/transform_listener.h"
#include "tf2_ros/buffer.h"
#include "geometry_msgs/PointStamped.h"
#include "tf2_geometry_msgs/tf2_geometry_msgs.h" //注意: 调用 transform 必须包含该头文件
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"dynamic_tf_sub");
ros::NodeHandle nh;
// 3.创建 TF 订阅节点
tf2_ros::Buffer buffer;
tf2_ros::TransformListener listener(buffer);
ros::Rate r(1);
while (ros::ok())
{
// 4.生成一个坐标点(相对于子级坐标系)
geometry_msgs::PointStamped point_laser;
point_laser.header.frame_id = "turtle1";
point_laser.header.stamp = ros::Time();
point_laser.point.x = 1;
point_laser.point.y = 1;
point_laser.point.z = 0;
// 5.转换坐标点(相对于父级坐标系)
//新建一个坐标点,用于接收转换结果
//--------------使用 try 语句或休眠,否则可能由于缓存接收延迟而导致坐标转换失败------------------------
try
{
geometry_msgs::PointStamped point_base;
point_base = buffer.transform(point_laser,"world");
ROS_INFO("坐标点相对于 world 的坐标为:(%.2f,%.2f,%.2f)",point_base.point.x,point_base.point.y,point_base.point.z);
}
catch(const std::exception& e)
{
// std::cerr << e.what() << '\n';
ROS_INFO("程序异常:%s",e.what());
}
r.sleep();
ros::spinOnce();
}
return 0;
}
tf2_ros::Buffer buffer;//创建一个订阅对象再创建一个 buffer
tf2_ros::TransformListener listener(buffer);//创建一个listener,传入buffer 这样就会订阅坐标关系的消息(通过话题/tf)并且传入到buffer中然后发布一个点,这个点的坐标是基于之前的发布方创建的turtle1坐标系创建的
point_laser.header.frame_id = "turtle1";
这里注意因为是动态坐标变换
buffer里会有很多值,并且每个值都对应一个时间戳
但时间戳也是实时变动的,但时间戳是有延迟的
point_laser.header.stamp = ros::Time();坐标点也有时间戳
转换的时候会拿着坐标点的时间戳去对应坐标关系的时间戳比对
比对的时候会判断两个时间戳基本一样(差距很小)就会转换坐标关系
但如果比较大的话,就不会转换抛异常
所以不能用
ros::Time::now();
而是设置成ros::Time();这样时间戳就是空的就可以直接转换
然后编译
终端运行
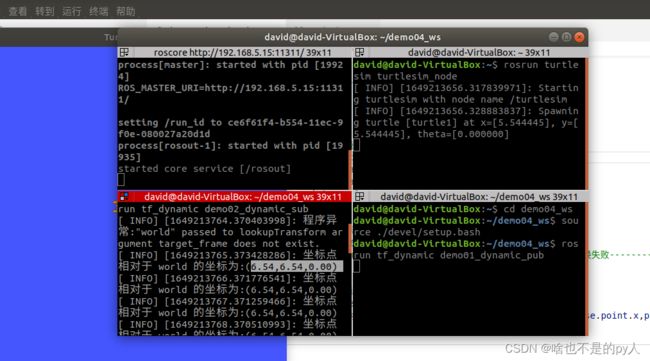
然后再让乌龟动起来
发布的坐标改变
Python
发布方
创建并且修改配置并授予权限

然后授予权限
然后复制以下代码
#! /usr/bin/env python
"""
动态的坐标系相对姿态发布(一个坐标系相对于另一个坐标系的相对姿态是不断变动的)
需求: 启动 turtlesim_node,该节点中窗体有一个世界坐标系(左下角为坐标系原点),乌龟是另一个坐标系,键盘
控制乌龟运动,将两个坐标系的相对位置动态发布
实现分析:
1.乌龟本身不但可以看作坐标系,也是世界坐标系中的一个坐标点
2.订阅 turtle1/pose,可以获取乌龟在世界坐标系的 x坐标、y坐标、偏移量以及线速度和角速度
3.将 pose 信息转换成 坐标系相对信息并发布
实现流程:
1.导包
2.初始化 ROS 节点
3.订阅 /turtle1/pose 话题消息
4.回调函数处理
4-1.创建 TF 广播器
4-2.创建 广播的数据(通过 pose 设置)
4-3.广播器发布数据
5.spin
"""
# 1.导包
import rospy
import tf2_ros
import tf
from turtlesim.msg import Pose
from geometry_msgs.msg import TransformStamped
# 4.回调函数处理
def doPose(pose):
# 4-1.创建 TF 广播器
broadcaster = tf2_ros.TransformBroadcaster()
# 4-2.创建 广播的数据(通过 pose 设置)
tfs = TransformStamped()
tfs.header.frame_id = "world"
tfs.header.stamp = rospy.Time.now()
tfs.child_frame_id = "turtle1"
tfs.transform.translation.x = pose.x#参数pose传入的
tfs.transform.translation.y = pose.y
tfs.transform.translation.z = 0.0
qtn = tf.transformations.quaternion_from_euler(0,0,pose.theta)
tfs.transform.rotation.x = qtn[0]
tfs.transform.rotation.y = qtn[1]
tfs.transform.rotation.z = qtn[2]
tfs.transform.rotation.w = qtn[3]
# 4-3.广播器发布数据
broadcaster.sendTransform(tfs)
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("dynamic_tf_pub_p")
# 3.订阅 /turtle1/pose 话题消息
sub = rospy.Subscriber("/turtle1/pose",Pose,doPose)
# 4.回调函数处理
# 4-1.创建 TF 广播器
# 4-2.创建 广播的数据(通过 pose 设置)
# 4-3.广播器发布数据
# 5.spin
rospy.spin()
先订阅/turtle1/pose的消息 然后发送给回调函数处理订阅到的消息
传入变量pose(包含/turtle1/pose发送的消息)————即订阅到的消息参数,名字任意也可以不叫pose
然后进行坐标转换
订阅方
新建文件配置并且授予权限

复制以下代码
#! /usr/bin/env python
"""
动态的坐标系相对姿态发布(一个坐标系相对于另一个坐标系的相对姿态是不断变动的)
需求: 启动 turtlesim_node,该节点中窗体有一个世界坐标系(左下角为坐标系原点),乌龟是另一个坐标系,键盘
控制乌龟运动,将两个坐标系的相对位置动态发布
实现分析:
1.乌龟本身不但可以看作坐标系,也是世界坐标系中的一个坐标点
2.订阅 turtle1/pose,可以获取乌龟在世界坐标系的 x坐标、y坐标、偏移量以及线速度和角速度
3.将 pose 信息转换成 坐标系相对信息并发布
实现流程:
1.导包
2.初始化 ROS 节点
3.创建 TF 订阅对象
4.处理订阅的数据
"""
# 1.导包
import rospy
import tf2_ros
# 不要使用 geometry_msgs,需要使用 tf2 内置的消息类型
from tf2_geometry_msgs import PointStamped
# from geometry_msgs.msg import PointStamped
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("static_sub_tf_p")
# 3.创建 TF 订阅对象
buffer = tf2_ros.Buffer()
listener = tf2_ros.TransformListener(buffer)
rate = rospy.Rate(1)
while not rospy.is_shutdown():
# 4.创建一个 radar 坐标系中的坐标点
point_source = PointStamped()
point_source.header.frame_id = "turtle1"
point_source.header.stamp = rospy.Time.now()
point_source.point.x = 10
point_source.point.y = 2
point_source.point.z = 3
try:
# 5.调研订阅对象的 API 将 4 中的点坐标转换成相对于 world 的坐标
point_target = buffer.transform(point_source,"world",rospy.Duration(1))
rospy.loginfo("转换结果:x = %.2f, y = %.2f, z = %.2f",
point_target.point.x,
point_target.point.y,
point_target.point.z)
except Exception as e:
rospy.logerr("异常:%s",e)
# 6.spin
rate.sleep()
先订阅到发布方发布的相对于turtle1相对于world的坐标变换
存储到buffer中
后面调用buffer的API进行计算
再发布一个基于turtle1坐标系的坐标点
然后把这个坐标点转换为基于world的坐标点

运行成功
注意用
rospy.Time()不设置时间戳
多坐标变换
引言
需求描述:
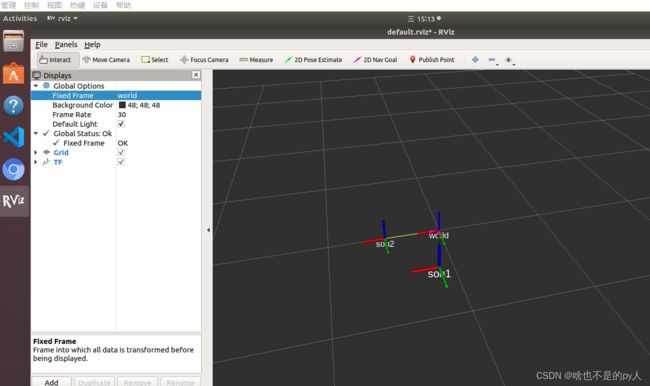
现有坐标系统,父级坐标系统 world,下有两子级系统 son1,son2,son1 相对于 world,以及 son2 相对于 world 的关系是已知的,求 son1原点在 son2中的坐标,又已知在 son1中一点的坐标,要求求出该点在 son2 中的坐标
数学理解
其实就是用O-son2-world的坐标减去O-son1-world的坐标即可
O-son2-world的坐标相当于O-world变换到O-son1-world再变换到O-son2-world
所以减去O-son1-world就相当于得到
O-son2-son2
即为所求
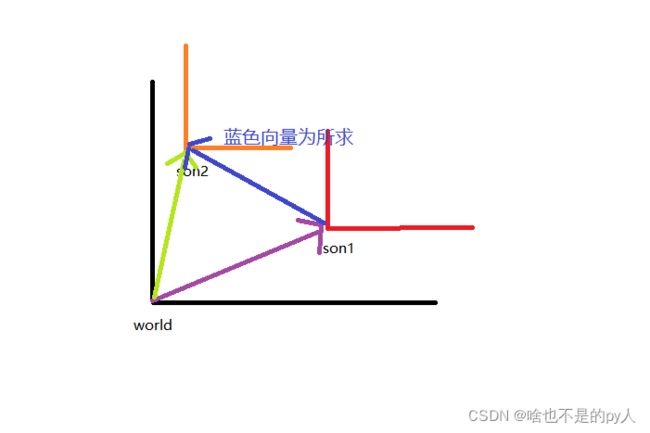
描述相对关系可以直接用向量法
实现分析:
- 首先,需要发布 son1 相对于 world,以及 son2 相对于 world 的坐标消息
- 然后,需要订阅坐标发布消息,并取出订阅的消息,借助于 tf2 实现 son1 和 son2 的转换
- 最后,还要实现坐标点的转换
实现流程:C++ 与 Python 实现流程一致
-
新建功能包,添加依赖
-
创建坐标相对关系发布方(需要发布两个坐标相对关系)
-
创建坐标相对关系订阅方
-
执行
launch
创建C++和python通用的发布方
新建功能包并新建launch文件

此处是用tf2_ros的内置节点发布son1和son2相对于world的坐标关系

用rviz可视化
C++
发布方
launch实现了
son1和son2相对于world的坐标
订阅方
新建文件配置并复制以下代码
/*
需求:
现有坐标系统,父级坐标系统 world,下有两子级系统 son1,son2,
son1 相对于 world,以及 son2 相对于 world 的关系是已知的,
求 son1 与 son2中的坐标关系,又已知在 son1中一点的坐标,要求求出该点在 son2 中的坐标
实现流程:
1.包含头文件
2.初始化 ros 节点
3.创建 ros 句柄
4.创建 TF 订阅对象
5.解析订阅信息中获取 son1 坐标系原点在 son2 中的坐标
解析 son1 中的点相对于 son2 的坐标
6.spin
*/
//1.包含头文件
#include "ros/ros.h"
#include "tf2_ros/transform_listener.h"
#include "tf2/LinearMath/Quaternion.h"
#include "tf2_geometry_msgs/tf2_geometry_msgs.h"
#include "geometry_msgs/TransformStamped.h"
#include "geometry_msgs/PointStamped.h"
int main(int argc, char *argv[])
{ setlocale(LC_ALL,"");
// 2.初始化 ros 节点
ros::init(argc,argv,"sub_frames");
// 3.创建 ros 句柄
ros::NodeHandle nh;
// 4.创建 TF 订阅对象
tf2_ros::Buffer buffer;
tf2_ros::TransformListener listener(buffer);
// 5.解析订阅信息中获取 son1 坐标系原点在 son2 中的坐标
ros::Rate r(1);
while (ros::ok())
{
try
{
// 解析 son1 中的点相对于 son2 的坐标
geometry_msgs::TransformStamped tfs = buffer.lookupTransform("son2","son1",ros::Time(0));
ROS_INFO("Son1 相对于 Son2 的坐标关系:父坐标系ID=%s",tfs.header.frame_id.c_str());
ROS_INFO("Son1 相对于 Son2 的坐标关系:子坐标系ID=%s",tfs.child_frame_id.c_str());
ROS_INFO("Son1 相对于 Son2 的坐标关系:x=%.2f,y=%.2f,z=%.2f",
tfs.transform.translation.x,
tfs.transform.translation.y,
tfs.transform.translation.z
);
// 坐标点解析
geometry_msgs::PointStamped ps;
ps.header.frame_id = "son1";
ps.header.stamp = ros::Time::now();
ps.point.x = 1.0;
ps.point.y = 2.0;
ps.point.z = 3.0;
geometry_msgs::PointStamped psAtSon2;
psAtSon2 = buffer.transform(ps,"son2");
ROS_INFO("在 Son2 中的坐标:x=%.2f,y=%.2f,z=%.2f",
psAtSon2.point.x,
psAtSon2.point.y,
psAtSon2.point.z
);
}
catch(const std::exception& e)
{
// std::cerr << e.what() << '\n';
ROS_INFO("异常信息:%s",e.what());
}
r.sleep();
// 6.spin
ros::spinOnce();
}
return 0;
}
buffer.lookupTransform("son2","son1",ros::Time(0));
这个内置的lookupTransform直接就可以转换坐标
ros::Time(0)
这个是取间隔最短的两个坐标关系帧计算相对关系
tf2_ros::TransformListener listener(buffer);
这个就是接收发布方发布的son1 son2 的坐标
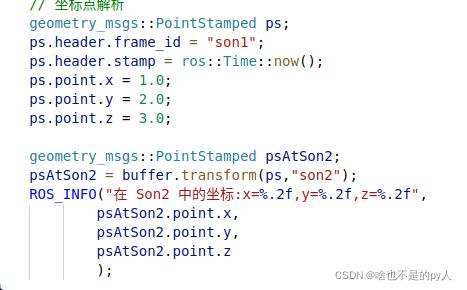
这一段是设置了一个son1下的点
然后转换为son2坐标系下的坐标
终端中运行

python
发布方
roslaunch实现
订阅方
新建文件并且配置
复制以下代码
#!/usr/bin/env python
"""
需求:
现有坐标系统,父级坐标系统 world,下有两子级系统 son1,son2,
son1 相对于 world,以及 son2 相对于 world 的关系是已知的,
求 son1 与 son2中的坐标关系,又已知在 son1中一点的坐标,要求求出该点在 son2 中的坐标
实现流程:
1.导包
2.初始化 ROS 节点
3.创建 TF 订阅对象
4.调用 API 求出 son1 相对于 son2 的坐标关系
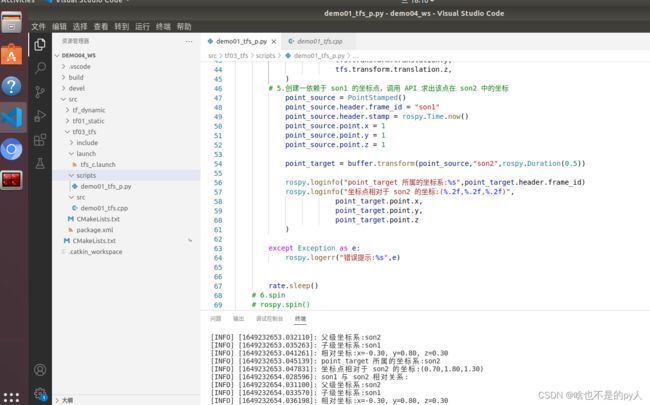
5.创建一依赖于 son1 的坐标点,调用 API 求出该点在 son2 中的坐标
6.spin
"""
# 1.导包
import rospy
import tf2_ros
from geometry_msgs.msg import TransformStamped
from tf2_geometry_msgs import PointStamped
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("frames_sub_p")
# 3.创建 TF 订阅对象
buffer = tf2_ros.Buffer()
listener = tf2_ros.TransformListener(buffer)
rate = rospy.Rate(1)
while not rospy.is_shutdown():
try:
# 4.调用 API 求出 son1 相对于 son2 的坐标关系
#lookup_transform(self, target_frame, source_frame, time, timeout=rospy.Duration(0.0)):
tfs = buffer.lookup_transform("son2","son1",rospy.Time(0))
rospy.loginfo("son1 与 son2 相对关系:")
rospy.loginfo("父级坐标系:%s",tfs.header.frame_id)
rospy.loginfo("子级坐标系:%s",tfs.child_frame_id)
rospy.loginfo("相对坐标:x=%.2f, y=%.2f, z=%.2f",
tfs.transform.translation.x,
tfs.transform.translation.y,
tfs.transform.translation.z,
)
# 5.创建一依赖于 son1 的坐标点,调用 API 求出该点在 son2 中的坐标
point_source = PointStamped()
point_source.header.frame_id = "son1"
point_source.header.stamp = rospy.Time.now()
point_source.point.x = 1
point_source.point.y = 1
point_source.point.z = 1
point_target = buffer.transform(point_source,"son2",rospy.Duration(0.5))
rospy.loginfo("point_target 所属的坐标系:%s",point_target.header.frame_id)
rospy.loginfo("坐标点相对于 son2 的坐标:(%.2f,%.2f,%.2f)",
point_target.point.x,
point_target.point.y,
point_target.point.z
)
except Exception as e:
rospy.logerr("错误提示:%s",e)
rate.sleep()
# 6.spin
# rospy.spin()
# 3.创建 TF 订阅对象
buffer = tf2_ros.Buffer()
listener = tf2_ros.TransformListener(buffer)
创建tf订阅对象,并且传入buffer

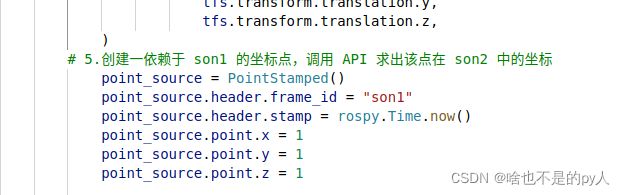
上图是创建基于son1的一个坐标点
然后调用API计算转换关系
point_target = buffer.transform(point_source,"son2",rospy.Duration(0.5))
然后输出
终端执行
总体流程:
订阅tf对象输出的son1 son2坐标系
然后调用lookup_transform计算出son1和son2转换关系
然后设定一个基于son1的坐标点输出其在son2中的坐标
坐标系关系查看
在机器人系统中,涉及的坐标系有多个,为了方便查看,ros 提供了专门的工具,可以用于生成显示坐标系关系的 pdf 文件,该文件包含树形结构的坐标系图谱。
准备
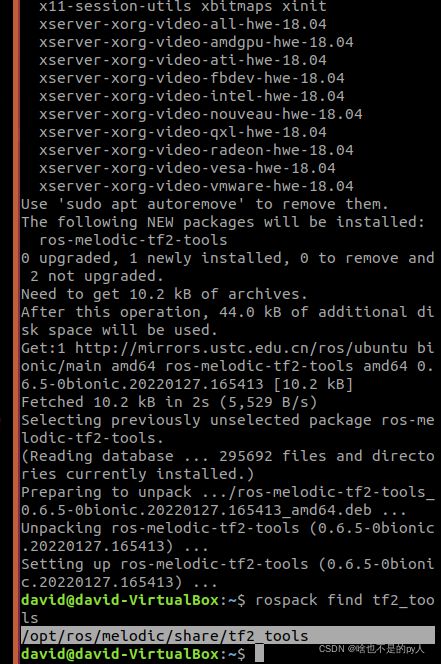
首先调用rospack find tf2_tools查看是否包含该功能包,如果没有,请使用如下命令安装:
sudo apt install ros-noetic-tf2-tools

安装成功
使用
运行之前的launch文件
生成 pdf 文件
启动坐标系广播程序之后,运行如下命令:
rosrun tf2_tools view_frames.py
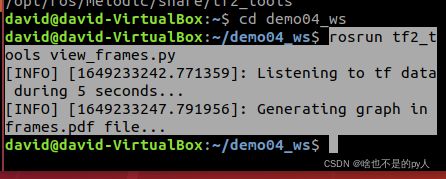
会产生类似于下面的日志信息:
[INFO] [1592920556.827549]: Listening to tf data during 5 seconds...
[INFO] [1592920561.841536]: Generating graph in frames.pdf file...
查看当前目录会生成一个 frames.pdf 文件
查看文件
可以直接进入目录打开文件,或者调用命令查看文件:evince frames.pdf

说明:Evince 原本是 GNOME 环境中一个简单的文档查看器,可以查看 PDF、Postscript、djvu、tiff、dvi 等文档。
内如如图所示:

TF坐标变换实操
引言
需求描述:
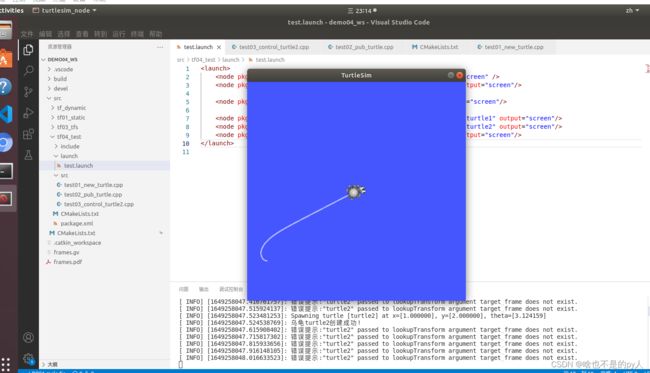
程序启动之初: 产生两只乌龟,中间的乌龟(A) 和 左下乌龟(B), B 会自动运行至A的位置,并且键盘控制时,只是控制 A 的运动,但是 B 可以跟随 A 运行
模型理解

实现分析:
乌龟跟随实现的核心,是乌龟A和B都要发布相对世界坐标系的坐标信息,然后,订阅到该信息需要转换获取A相对于B坐标系的信息,最后,再生成速度信息,并控制B运动。
- 启动乌龟显示节点
- 在乌龟显示窗体中生成一只新的乌龟(需要使用服务)
- 编写两只乌龟发布坐标信息的节点
- 编写订阅节点订阅坐标信息并生成新的相对关系生成速度信息
实现流程:C++ 与 Python 实现流程一致
-
新建功能包,添加依赖
-
编写服务客户端,用于生成一只新的乌龟
-
编写发布方,发布两只乌龟的坐标信息
-
编写订阅方,订阅两只乌龟信息,生成速度信息并发布
-
运行
准备工作:
了解如何创建第二只乌龟,且不受键盘控制
创建第二只乌龟需要使用rosservice,话题使用的是 spawn
rosservice call /spawn "x: 1.0
y: 1.0
theta: 1.0
name: 'turtle_flow'"
name: "turtle_flow"//发布成功的话会返回设定的乌龟名字
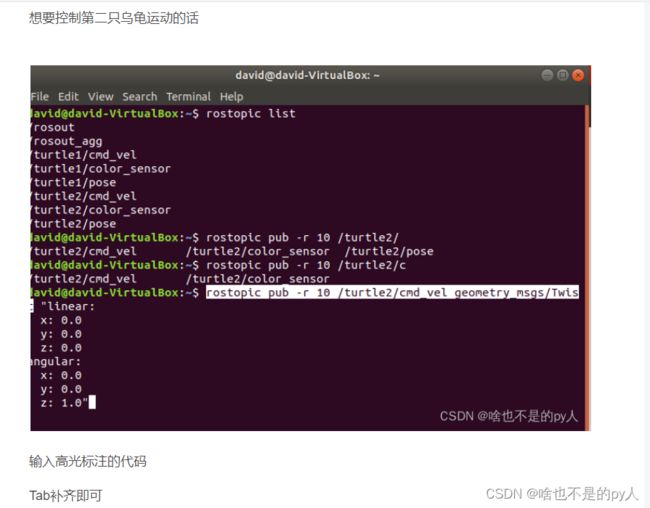
键盘是无法控制第二只乌龟运动的,因为使用的话题: /第二只乌龟名称/cmd_vel,对应的要控制乌龟运动必须发布对应的话题消息
了解如何获取两只乌龟的坐标
是通过话题 /乌龟名称/pose 来获取的
x: 1.0 //x坐标
y: 1.0 //y坐标
theta: -1.21437060833 //角度
linear_velocity: 0.0 //线速度
angular_velocity: 1.0 //角速度C++
准备工作
编译一下防止有错
生成小乌龟
编写以下代码
/*
创建第二只小乌龟
*/
#include "ros/ros.h"
#include "turtlesim/Spawn.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//执行初始化
ros::init(argc,argv,"create_turtle");
//创建节点
ros::NodeHandle nh;
//创建服务客户端
ros::ServiceClient client = nh.serviceClient("/spawn");
ros::service::waitForService("/spawn");
turtlesim::Spawn spawn;
spawn.request.name = "turtle2";
spawn.request.x = 1.0;
spawn.request.y = 2.0;
spawn.request.theta = 3.12415926;
bool flag = client.call(spawn);
if (flag)
{
ROS_INFO("乌龟%s创建成功!",spawn.response.name.c_str());
}
else
{
ROS_INFO("乌龟2创建失败!");
}
ros::spin();
return 0;
}
用的话题就是\spawn
这是服务通信
实际上就是创建客户端发送需要生成的小乌龟的位置名字信息给服务端(默认话题/spawn)在服务端调用API生成小乌龟
编写launch
终端运行
因为两只乌龟订阅的速度话题是不一样的
分别是
turtle1/cmd_vel
turtle2/cmd_vel
想要控制第二只乌龟运动的话

输入高光标注的代码
Tab补齐即可
发布两只乌龟坐标
通过launch传参
这样只用编写一个乌龟的代码发布,把乌龟名字设置成传参即可
可以看到两行代码只有args不一样
然后新建文件配置并且复制以下代码
/*
该文件实现:需要订阅 turtle1 和 turtle2 的 pose,然后广播相对 world 的坐标系信息
注意: 订阅的两只 turtle,除了命名空间(turtle1 和 turtle2)不同外,
其他的话题名称和实现逻辑都是一样的,
所以我们可以将所需的命名空间通过 args 动态传入
实现流程:
1.包含头文件
2.初始化 ros 节点
3.解析传入的命名空间
4.创建 ros 句柄
5.创建订阅对象
6.回调函数处理订阅的 pose 信息
6-1.创建 TF 广播器
6-2.将 pose 信息转换成 TransFormStamped
6-3.发布
7.spin
*/
//1.包含头文件
#include "ros/ros.h"
#include "turtlesim/Pose.h"
#include "tf2_ros/transform_broadcaster.h"
#include "tf2/LinearMath/Quaternion.h"
#include "geometry_msgs/TransformStamped.h"
//保存乌龟名称
std::string turtle_name;
void doPose(const turtlesim::Pose::ConstPtr& pose){
// 6-1.创建 TF 广播器 ---------------------------------------- 注意 static
static tf2_ros::TransformBroadcaster broadcaster;
// 6-2.将 pose 信息转换成 TransFormStamped
geometry_msgs::TransformStamped tfs;
tfs.header.frame_id = "world";
tfs.header.stamp = ros::Time::now();
tfs.child_frame_id = turtle_name;
tfs.transform.translation.x = pose->x;
tfs.transform.translation.y = pose->y;
tfs.transform.translation.z = 0.0;
tf2::Quaternion qtn;
qtn.setRPY(0,0,pose->theta);
tfs.transform.rotation.x = qtn.getX();
tfs.transform.rotation.y = qtn.getY();
tfs.transform.rotation.z = qtn.getZ();
tfs.transform.rotation.w = qtn.getW();
// 6-3.发布
broadcaster.sendTransform(tfs);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ros 节点
ros::init(argc,argv,"pub_tf");
// 3.解析传入的命名空间
if (argc != 2)
{
ROS_ERROR("请传入正确的参数");
} else {
turtle_name = argv[1];
ROS_INFO("乌龟 %s 坐标发送启动",turtle_name.c_str());
}
// 4.创建 ros 句柄
ros::NodeHandle nh;
// 5.创建订阅对象
ros::Subscriber sub = nh.subscribe(turtle_name + "/pose",1000,doPose);
// 6.回调函数处理订阅的 pose 信息
// 6-1.创建 TF 广播器
// 6-2.将 pose 信息转换成 TransFormStamped
// 6-3.发布
// 7.spin
ros::spin();
return 0;
}
声明变量接收传递参数
std::string turtle_name;
订阅的话题名称用以下方式
ros::Subscriber sub = nh.subscribe
传入了解析launch传入的argv
turtle_name = argv[1];
然后编译运行
启动rviz
确实是三个坐标系

订阅方实现解析坐标信息并生成速度信息
订阅 turtle1 和 turtle2 的 TF 广播信息,查找并转换时间最近的 TF 信息 将 turtle1 转换成相对 turtle2 的坐标,在计算线速度和角速度并发布 实现流程: 1.包含头文件 2.初始化 ros 节点 3.创建 ros 句柄 4.创建 TF 订阅对象 5.处理订阅到的 TF 6.spin
编写launch
需要订阅turtle1与turtle2相对于世界坐标系的坐标消息
并转换成turtle1相对于turtle2的坐标关系
再生成速度消息
然后新建文件配置复制代码
/*
订阅 turtle1 和 turtle2 的 TF 广播信息,查找并转换时间最近的 TF 信息
将 turtle1 转换成相对 turtle2 的坐标,在计算线速度和角速度并发布
实现流程:
1.包含头文件
2.初始化 ros 节点
3.创建 ros 句柄
4.创建 TF 订阅对象
5.处理订阅到的 TF
6.spin
*/
//1.包含头文件
#include "ros/ros.h"
#include "tf2_ros/transform_listener.h"
#include "geometry_msgs/TransformStamped.h"
#include "geometry_msgs/Twist.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ros 节点
ros::init(argc,argv,"sub_TF");
// 3.创建 ros 句柄
ros::NodeHandle nh;
// 4.创建 TF 订阅对象
tf2_ros::Buffer buffer;
tf2_ros::TransformListener listener(buffer);
// 5.处理订阅到的 TF
// 需要创建发布 /turtle2/cmd_vel 的 publisher 对象
ros::Publisher pub = nh.advertise("/turtle2/cmd_vel",1000);
ros::Rate rate(10);
while (ros::ok())
{
try
{
//5-1.先获取 turtle1 相对 turtle2 的坐标信息
geometry_msgs::TransformStamped tfs = buffer.lookupTransform("turtle2","turtle1",ros::Time(0));
//5-2.根据坐标信息生成速度信息 -- geometry_msgs/Twist.h
geometry_msgs::Twist twist;
twist.linear.x = 0.5 * sqrt(pow(tfs.transform.translation.x,2) + pow(tfs.transform.translation.y,2));
twist.angular.z = 4 * atan2(tfs.transform.translation.y,tfs.transform.translation.x);
//5-3.发布速度信息 -- 需要提前创建 publish 对象
pub.publish(twist);
}
catch(const std::exception& e)
{
// std::cerr << e.what() << '\n';
ROS_INFO("错误提示:%s",e.what());
}
rate.sleep();
// 6.spin
ros::spinOnce();
}
return 0;
}
先获取 turtle1 相对 turtle2 的坐标信息
geometry_msgs::TransformStamped tfs = buffer.lookupTransform("turtle2","turtle1",ros::Time(0));
然后是速度算法

对应编码
需要创建发布 /turtle2/cmd_vel 的 publisher 对象
ros::Publisher pub = nh.advertise
1000是队列长度
根据坐标信息生成速度信息 -- geometry_msgs/Twist.h
geometry_msgs::Twist twist;
twist.linear.x = 0.5 * sqrt(pow(tfs.transform.translation.x,2) + pow(tfs.transform.translation.y,2));
twist.angular.z = 4 * atan2(tfs.transform.translation.y,tfs.transform.translation.x);
算法是给定两者的角度距离和直线距离
假定用1s去完成所以速度就等于距离或者弧度值
加上系数就是修改完成时间
pow()是指数,pow(tfs.transform.translation.x,2)就是x的平方
0.5和4 是系数,任意取值
发布速度信息 -- 需要提前创建 publish 对象
pub.publish(twist);
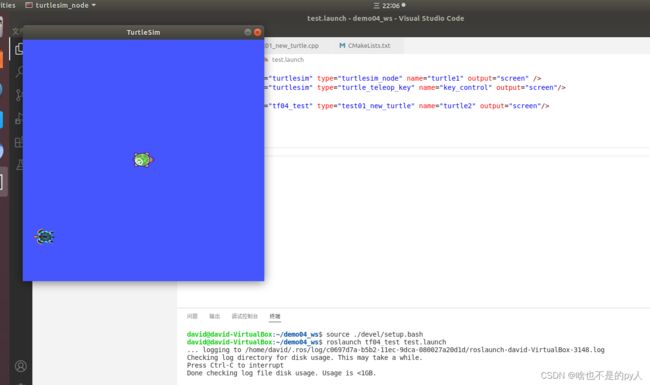
然后终端执行
执行成功
注意:如果编译没有报错,但是乌龟没有跟随的话那就是可能没有刷新环境变量source一下即可

从节点图可以看出完整程序运行
键盘控制节点通过 turtle1/cmd_vel 话题 控制 turtle1
然后
turtle1和turtle2 + /pose 话题 分别发布给 /tf_pub1 or 2 节点
然后再发送给/tf话题
然后
/tf_sub订阅了/tf话题
然后处理请求后发给
/turtle2/cmd_vel话题
然后turtle2 的GUI开始跟随运动
Python实现
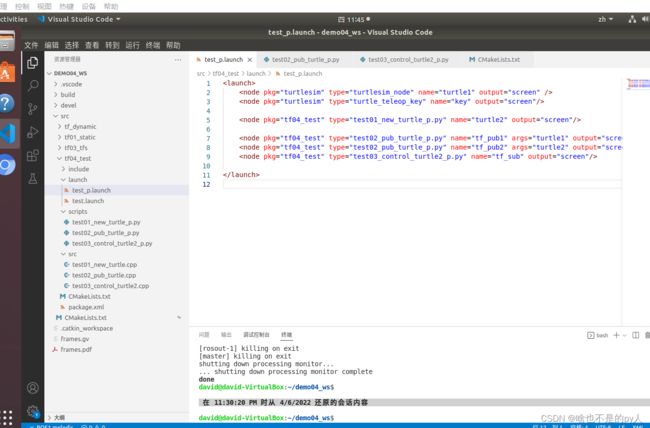
建立launch文件
流程:
1.启动乌龟GUI节点
2.调用服务生成一个新的乌龟
3.发布两只乌龟的坐标信息
4.订阅坐标信息 并且转换成乌龟A 相对于 乌龟B 的坐标信息 最后再生成控制乌龟B的速度信息

node ---> 包含的某个节点
pkg -----> 功能包
type ----> 被运行的节点文件
name --> 为节点命名
output-> 设置日志的输出目标
服务客户端(生成乌龟)
新建文件
复制以下代码
#! /usr/bin/env python
"""
调用 service 服务在窗体指定位置生成一只乌龟
流程:
1.导包
2.初始化 ros 节点
3.创建服务客户端
4.等待服务启动
5.创建请求数据
6.发送请求并处理响应
"""
#1.导包
import rospy
from turtlesim.srv import Spawn, SpawnRequest, SpawnResponse
if __name__ == "__main__":
# 2.初始化 ros 节点
rospy.init_node("turtle_spawn_p")
# 3.创建服务客户端
client = rospy.ServiceProxy("/spawn",Spawn)
# 4.等待服务启动
client.wait_for_service()
# 5.创建请求数据
req = SpawnRequest()
req.x = 1.0
req.y = 1.0
req.theta = 3.14
req.name = "turtle2"
# 6.发送请求并处理响应
try:
response = client.call(req)
rospy.loginfo("乌龟创建成功,名字是:%s",response.name)
except Exception as e:
rospy.loginfo("服务调用失败....")
用的话题是/spawn
client = rospy.ServiceProxy("/spawn",Spawn)
创建请求数据
req = SpawnRequest()
req.x = 1.0
req.y = 1.0
req.theta = 3.14
req.name = "turtle2"
发送请求并处理响应
try:
response = client.call(req)
rospy.loginfo("乌龟创建成功,名字是:%s",response.name)
对应授予权限刷新环境并且运行
发布方(发布两只乌龟的坐标信息)
需要订阅 turtle1 和 turtle2 的 pose,然后广播相对 world 的坐标系信息修改launch文件
1.复用之前的乌龟坐标发布功能
2.调用节点时,以参数的方式传递乌龟名称,解析参数置换: 订阅话题消息 和 子集坐标系名称
新建文件复制以下代码
#! /usr/bin/env python
"""
该文件实现:需要订阅 turtle1 和 turtle2 的 pose,然后广播相对 world 的坐标系信息
注意: 订阅的两只 turtle,除了命名空间(turtle1 和 turtle2)不同外,
其他的话题名称和实现逻辑都是一样的,
所以我们可以将所需的命名空间通过 args 动态传入
实现流程:
1.导包
2.初始化 ros 节点
3.解析传入的命名空间
4.创建订阅对象
5.回调函数处理订阅的 pose 信息
5-1.创建 TF 广播器
5-2.将 pose 信息转换成 TransFormStamped
5-3.发布
6.spin
"""
# 1.导包
import rospy
import sys
from turtlesim.msg import Pose
from geometry_msgs.msg import TransformStamped
import tf2_ros
import tf_conversions
turtle_name = ""
def doPose(pose):
# rospy.loginfo("x = %.2f",pose.x)
#1.创建坐标系广播器
broadcaster = tf2_ros.TransformBroadcaster()
#2.将 pose 信息转换成 TransFormStamped
tfs = TransformStamped()
tfs.header.frame_id = "world"
tfs.header.stamp = rospy.Time.now()
tfs.child_frame_id = turtle_name
tfs.transform.translation.x = pose.x
tfs.transform.translation.y = pose.y
tfs.transform.translation.z = 0.0
qtn = tf_conversions.transformations.quaternion_from_euler(0, 0, pose.theta)
tfs.transform.rotation.x = qtn[0]
tfs.transform.rotation.y = qtn[1]
tfs.transform.rotation.z = qtn[2]
tfs.transform.rotation.w = qtn[3]
#3.广播器发布 tfs
broadcaster.sendTransform(tfs)
if __name__ == "__main__":
# 2.初始化 ros 节点
rospy.init_node("sub_tfs_p")
# 3.解析传入的命名空间
rospy.loginfo("-------------------------------%d",len(sys.argv))
if len(sys.argv) < 2:
rospy.loginfo("请传入参数:乌龟的命名空间")
else:
turtle_name = sys.argv[1]
rospy.loginfo("///乌龟:%s",turtle_name)
rospy.Subscriber(turtle_name + "/pose",Pose,doPose)
# 4.创建订阅对象
# 5.回调函数处理订阅的 pose 信息
# 5-1.创建 TF 广播器
# 5-2.将 pose 信息转换成 TransFormStamped
# 5-3.发布
# 6.spin
rospy.spin()
接收乌龟名称的变量
turtle_name = ""
解析传入的参数(launch(虽然只设置了一个args)传入几个参数?) 实际上传入了1.文件全路径 2.传入的参数 3.节点名称 4.日志文件路径
rospy.loginfo("-------------------------------%d",len(sys.argv))
sys.argv应该是四
launch传入
turtle_name = sys.argv[1]
创建坐标系广播器
broadcaster = tf2_ros.TransformBroadcaster()
订阅方(解析坐标信息并生成速度信息)
修改launch文件
订阅坐标信息 并且转换成乌龟A 相对于 乌龟B 的坐标信息 最后再生成控制乌龟B的速度信息
复制以下代码
#! /usr/bin/env python
"""
订阅 turtle1 和 turtle2 的 TF 广播信息,查找并转换时间最近的 TF 信息
将 turtle1 转换成相对 turtle2 的坐标,在计算线速度和角速度并发布
实现流程:
1.导包
2.初始化 ros 节点
3.创建 TF 订阅对象
4.处理订阅到的 TF
4-1.查找坐标系的相对关系
4-2.生成速度信息,然后发布
"""
# 1.导包
import rospy
import tf2_ros
from geometry_msgs.msg import TransformStamped, Twist
import math
if __name__ == "__main__":
# 2.初始化 ros 节点
rospy.init_node("sub_tfs_p")
# 3.创建 TF 订阅对象
buffer = tf2_ros.Buffer()
listener = tf2_ros.TransformListener(buffer)
# 4.处理订阅到的 TF
rate = rospy.Rate(10)
# 创建速度发布对象
pub = rospy.Publisher("/turtle2/cmd_vel",Twist,queue_size=1000)
while not rospy.is_shutdown():
rate.sleep()
try:
#def lookup_transform(self, target_frame, source_frame, time, timeout=rospy.Duration(0.0)):
trans = buffer.lookup_transform("turtle2","turtle1",rospy.Time(0))
# rospy.loginfo("相对坐标:(%.2f,%.2f,%.2f)",
# trans.transform.translation.x,
# trans.transform.translation.y,
# trans.transform.translation.z
# )
# 根据转变后的坐标计算出速度和角速度信息
twist = Twist()
# 间距 = x^2 + y^2 然后开方
twist.linear.x = 0.5 * math.sqrt(math.pow(trans.transform.translation.x,2) + math.pow(trans.transform.translation.y,2))
twist.angular.z = 4 * math.atan2(trans.transform.translation.y, trans.transform.translation.x)
pub.publish(twist)
except Exception as e:
rospy.logwarn("警告:%s",e)
创建 TF 订阅对象
buffer = tf2_ros.Buffer()
listener = tf2_ros.TransformListener(buffer)
创建速度发布对象
pub = rospy.Publisher("/turtle2/cmd_vel",Twist,queue_size=1000)
发布给/turtle2/cmd_vel

转换坐标计算turtle2相对于turtle1的坐标关系
参数1:目标坐标系
参数2:源坐标系
参数3: rospy.Time(0)取时间最近的两个时间戳
返回:turtle1与turtle2的坐标关系
trans = buffer.lookup_transform("turtle2","turtle1",rospy.Time(0))
组织Twist消息
twist = Twist() #对应pub里设置的消息
间距 = x^2 + y^2 然后开方
twist.linear.x = 0.5 * math.sqrt(math.pow(trans.transform.translation.x,2) + math.pow(trans.transform.translation.y,2))
twist.angular.z = 4 * math.atan2(trans.transform.translation.y, trans.transform.translation.x)
算法是给定两者的角度距离和直线距离
假定用1s去完成所以速度就等于距离或者弧度值
加上系数就是修改完成时间
pow()是指数,pow(tfs.transform.translation.x,2)就是x的平方
0.5和4 是系数,任意取值
发布
pub.publish(twist)
授予权限修改配置运行
这里出了报错的话
加一行
# coding=utf-8
实现成功

小结
坐标变换在机器人系统中是一个极其重要的组成模块,在 ROS 中 TF2 组件是专门用于实现坐标变换的,TF2 实现具体内容又主要介绍了如下几部分:
1.静态坐标变换广播器,可以编码方式或调用内置功能包来实现(建议后者),适用于相对固定的坐标系关系
2.动态坐标变换广播器,以编码的方式广播坐标系之间的相对关系,适用于易变的坐标系关系
3.坐标变换监听器,用于监听广播器广播的坐标系消息,可以实现不同坐标系之间或同一点在不同坐标系之间的变换
4.机器人系统中的坐标系关系是较为复杂的,还可以通过 tf2_tools 工具包来生成 ros 中的坐标系关系图
5.当前 TF2 已经替换了 TF,官网建议直接学习 TF2,并且 TF 与 TF2 的使用流程与实现 API 比较类似,只要有任意一方的使用经验,另一方也可以做到触类旁通
TF2与TF
1.TF2与TF比较_简介
-
TF2已经替换了TF,TF2是TF的超集,建议学习 TF2 而非 TF
-
TF2 功能包的增强了内聚性,TF 与 TF2 所依赖的功能包是不同的,TF 对应的是
tf包,TF2 对应的是tf2和tf2_ros包,在 TF2 中不同类型的 API 实现做了分包处理。 -
TF2 实现效率更高,比如在:TF2 的静态坐标实现、TF2 坐标变换监听器中的 Buffer 实现等
2.TF2与TF比较_静态坐标变换演示
接下来,我们通过静态坐标变换来演示TF2的实现效率。
2.1启动 TF2 与 TF 两个版本的静态坐标变换
TF2 版静态坐标变换:rosrun tf2_ros static_transform_publisher 0 0 0 0 0 0 /base_link /laser
TF 版静态坐标变换:rosrun tf static_transform_publisher 0 0 0 0 0 0 /base_link /laser 100
会发现,TF 版本的启动中最后多一个参数,该参数是指定发布频率
2.2运行结果比对
使用rostopic查看话题,包含/tf与/tf_static, 前者是 TF 发布的话题,后者是 TF2 发布的话题,分别调用命令打印二者的话题消息
rostopic echo /tf: 当前会循环输出坐标系信息
rostopic echo /tf_static: 坐标系信息只有一次
2.3结论
如果是静态坐标转换,那么不同坐标系之间的相对状态是固定的,既然是固定的,那么没有必要重复发布坐标系的转换消息,很显然的,tf2 实现较之于 tf 更为高效