医疗图像配准-点云配准总结
近期主要在做一个关于将三维CT影像和点云数据做配准的项目,通过前期调研,业内主要的方法是将CT影像使用MarchingCubes(移动立方体)生成等值面三角网格,然后再使用点云配准的方法。
1、三维图像转三角网格(STL)
三维图像转stl网格,在vtk中已经实现,主要使用MarchingCubes算法,简单而有效,算法介绍详见下面篇博文,对比众多水文,这篇讲的比较明白。
图像数据到网格数据-1——MarchingCubes算法 - 止战 - 博客园原文:http://blog.csdn.net/u013339596/article/details/19167907概述 之前的博文已经完整的介绍了三维图像数据和三角形网格数据。在实际应用中,利用遥https://www.cnblogs.com/zhizhan/p/3987254.html
2.配准工具选择
在配准工具选择中,先后使用了vtk和itk,其内部都包含了icp算法的模块,但都是经典的point-to-point算法,而且只适宜对数据量较少的点进行配准,如果点太多,那么耗时太久,虽然itk官方例子中有可以通过构建距离图的例子加快运算,但通过实际使用,并没有起到很好的加速作用,综合比较之后,最终还是选用点云专门处理库PCL做。
3.PCL配准库基本介绍
PCL配准库中集成了很多针对点云配准的精配准及粗配准方法,主要类如下:
(1)CorrespondenceEstimation类,用来确定两点云中的对应匹配关系。
(2)CorrespondenceRejectorFeatures类,能够实现基于特征匹配的对应点对提取。
(3)SampleConsensusPrerejective类,实现了基于RANSAC方法的对应点对外点去除,用于姿态评估和点云配准中的几何一致性限制,从而保证后续算法的准确和高效。
(4)TransformationEstimation3Point类,实现使用三个匹配点计算两点云变换矩阵。
(5)TransformationFromCorrespondences类,实现三个及以上匹配点间变换矩阵的计算。
(6)TransformationEstimationDQ类和TransformationEstimationDualQuaternion类
实现基于对偶四元数的点云姿态估计。
(7)TransformationEstimationLM类,实现基于对应匹配点对,用Levenberg-Marquardt优化的变换矩阵估计。
(8)TransformationEstimationPointToPlane类,实现基于Levenberg-Marquardt优化的匹配点对间最小点到平面距离的最优变换矩阵计算。
(9)TransformationEstimationPointToPlaneWeighted类,在TransformationEstimationPointToPlane类的基础上加入了对应匹配点的权重,以适应更为复杂场景点云配准任务。
(10)TransformationEstimationPointToPlaneLLS 类,基于线性最小二乘的点到平面距离累计最小化约束,对应点到平面的距离计算加入法向量约束,具体内容参照论文:Linear Least-Squares Optimization for Point-to-Plane ICP surface registration 2014
(11)TransformationEstimationPointToPlaneLLSWeighted类,在TransformationEstimationPointToPlaneLLS 类基础上加入了对应点匹配权重,从而更合理的计算匹配点间变换矩阵。
(12)TransformationEstimationSVD类,使用SVD分解策略完成匹配点对的变换矩阵计算。
(13)TransformationValidationEuclidean类,实现了给定对应匹配的变换,并计算可靠性得分。
(14)IterativeClosestPoint类,实现迭代最近点算法(ICP)。
(15)IterativeClosestPointNonLinear类,ICP算法的变体,后端使用Levenberg-Marquardt作为优化。
(16)GeneralizedIterativeClosestPoint类,ICP算法的变体,实现了一般化的ICP算法,具体参考Generalized-ICP论文。
(17)GeneralizedIterativeClosestPoint6D类,集成了L*a*b*颜色空间到Generalized-ICP算法中。
(18)IterativeClosestPointWithNormals 类,ICP算法的变体,以点到平面的最小距离作为迭代优化对象,实现点云配准。
(19)FPCSInitialAlignment 类,实现《4-points congruent sets for robust pairwise surface registration》中的4PCS算法;
(20)KFPCSInitialAlignment类,实现《Markerless point cloud registration with keypoint-based 4-points congruent sets》中的k4PCS算法。
(21)NormalDistributionsTransform(NDT)类,统计分析点云中法向量分布,来实现点云的转化和配准。具体参考The Three-Dimensional Normal-Distributions Transform an Efficient Representation for Registration(2009)
4.配准方法介绍
4.1采样一致性初始配准算法SAC-IA(Sample Consensus Initial Aligment )
4.1.1介绍
采样一致性初始配准算法通常基于特征描述子PFH和FPFH进行配准。
PFH(Point Feature Histograms)是一种点云特征点的特征描述子,是一种的姿态不变的局部特征,其目标是编码k邻域中的几何特征,关于PFH描述子生成的原理,网上有很多介绍,在此不再赘述,在PCL中PFH经常会生成125维的向量,有些同学可能不太明白这个特征描述子为什么是125维,其实可以这样想,PCL中主要使用经典的PFH描述子k个邻域内两两点之间的四联体(三个角度一个距离)中的三个角度变量(先叫三联体),然后每个角度变量分成五份,我们可以先不要想125维的一维向量,先生成一个具有5*5*5维度的125个小格子的三维直方图,然后每计算一个三联体,在三维直方图中符合的位置加1,然后计算结束之后,摊开,即成为了125维的一维向量。
FPFH特征描述子,对PFH特征进一步优化升级就得到了快速点特征直方图(FPFH)。其计算过程如下:
(1)为查询点求得它和其k邻域内每个点之间的三个特征元素值,然后统计成一个SPFH;
(2)分别对k邻域中的每个点确定k邻域,按第一步分别形成自己的SPFH;
(3)加权统计生成最终的33维度的特征向量(每个特征维度生成一个直方图,最后连在一起)
PFH和FPFH的主要区别
(1)FPFH没有对全互联点Pq的所有邻近点的计算参数进行统计,因此可能漏掉了一些重要的点对,而这些漏掉的点对可能对捕捉查询点周围的几何特征有贡献。
(2)PFH特征模型是对查询点周围的一个精确的邻域半径内,而FPFH还包括r范围以外2r以内的额外点对。
(3)因为重新计算权重的方式,FPFH通过结合SFPH的值,重新捕获邻近重要点对的几何信息。
(4)FPFH的整体复杂性低,FPFH在实际的应用中更为常见。
4.1.2流程
(1)计算PFH或者FPFH特征描述子
(2)SAC配准(配准的采样记录要大于某个阈值,保证采样点具有不同的特征),使用Huber作为罚函数
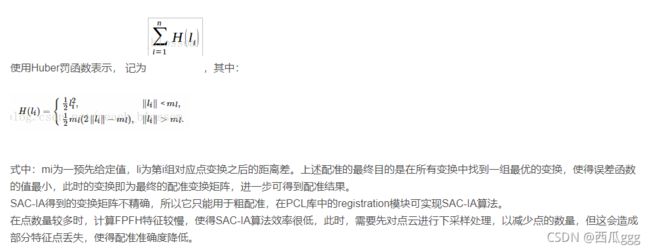
(3)进行精配准
4.1.3算法适用范围
粗配准,可以看到该配准方法还是基于局部特征描述子的一种配准方法。在医疗图像软件中基于特征描述子配准方法使用较少,更多的是先人工选择一些特征点,完成粗配准。
4.1.4参考资料:
(1)PFH和FPFH_xinxiangwangzhi_的博客-CSDN博客
(2)SAC-IA粗配准+ICP精配准_peach_blossom的博客-CSDN博客_sac-ia
4.2 Point to Point ICP算法
4.2.1算法介绍
方法来自论文《A method for registration of 3-D shapes》,网上介绍比较多,在后续项目中也使用了该算法,总体来说效果还可以,主要公式如下: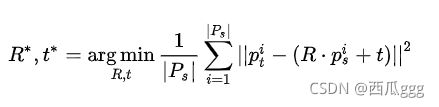
算法主要包含两个步骤
(1)在moving点云在fixed点云中每个点的最近点,在PCL中默认会构建fixed点云KD-tree,所以在配准时,速度比ITK要快很多
(2)基于找到的最近点对,求解最优变换矩阵,在PCL中使用SVD来求解。
4.2.2算法中设置需要设置的变量说明
(1)setMaximumIterations,设置最大迭代次数
(2)setEuclideanFitnessEpsilon,收敛条件,均方误差小于此值就停止迭代。
(3)setTransformtionEpsilon,收敛条件,设置两次变化矩阵之间的差值小于此值就停止迭代。
(4)setMaxCorrespondenaceDistance,设置对应点对之间的最大距离,在步骤1中使用。
4.2.3算法使用中需要注意的问题
(1)ICP算法对初始值很敏感,极容易陷入局部最优解,所以在迭代之前最好设计好初始值。
(2)ICP算法原来上来讲要对moving中找到在fixed点云中的对应点,然后来计算转换矩阵,如果在moving点云中包含了不应该配对的点,这会导致计算误差,这种情况应该避免
(3)ICP的moving点云中最好少用一些平面或者扫描面的点,这种类型点太多的话,对结果影响较大,对于ICP算法来讲,moving点云中尽量包含较多有一定曲率,并且距离较远的点,这样可能会提高精度。
(4)如果moving点云中包含了太多点,可以使用降采样来过滤一些点。
4.2.4适用范围
地球人都知道在精配准中使用.
4.3 Point to Plane ICP
4.3.1算法介绍
出自《Object Modeling by Registration of Multiple Range Images》,基本原理如下:
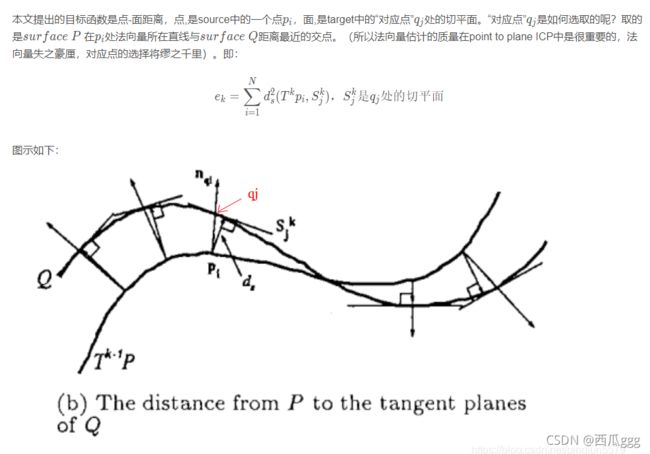
后续由《Linear Least-Squares Optimization for. Point-to-Plane ICP Surface Registration》这篇论文将该问题转换成了近似的线性最小二乘问题,可以使用SVD求解
4.3.2算法适用范围
(1)算法比point to point 方法可以提高收敛速度,但论文中提到不一定会收敛到全局最优解
(2)算法中主要使用了法向量来计算,所以在配准中使用准确的法向量至关重要,主要可以通过两个方法来保证①对比较平滑、质量较好的点云使用该方法②如果原始点云质量不太好,那么在相对smooth区域采样,然后进行配准。
参考文献
【1】https://blog.csdn.net/pingjun5579/article/details/118546565
4.4 Plane to Plane ICP
4.4.1介绍
该方法在论文《Generalized-ICP》中最先提出来,Generalized-ICP其实是一种基于概率论的算法框架,将point to point 和point to plane作为该框架中的一种特例,并且又提出了plane to plane方法,该方法的特点是综合考虑了距离和法向量,收敛效果较好,可以纠正最大匹配距离设的值比较大的情况,具体算法介绍可以参照如下文章:
[论文阅读][ICP变种] Generalized-ICP_你代码像一首诗的博客-CSDN博客
4.4.2适用范围
由于该方法也使用了法向量,如果点云中噪声比较多,那么计算的法向量就不太准确,也会影响最终精度,对于医疗图像来说,如果骨质成像不好,直接使用移动立方体生成的stl网格是及其不平滑的,这时候可以先平滑后再使用该方法,综合icp三种方法,油管有个up主建议generalized icp应该是使用icp算法时首选的方法。
4.5 NDT算法
4.5.1原理介绍
NDT(Normal Distribution Transformation)算法主要有三篇论文:
1. 认为是它首先提出的,不过是2D
2. 领域应用到了3D
3. 做了全面的总结和拓展,博士论文 网上写该算法原理的最多是第二篇,这也是激光点云配准中经常使用的一种方法,通过学习该算法,可以知道,该算法的思想与Generalized ICP算法非常类似,都使用了概率分布,而且都假设点主要分布服从正态分布,不同的是Generalized ICP直接假设点的位置符合高斯分布,而在NDT算法中假设每个分成的小格子内部的点符合高斯概率分布(实现时会加入均匀分布),这样做我个人感觉会减少计算时间,加快计算速度。NDT基本原理和步骤如下:
(1)分成小格子,计算每个小格子中的高斯分布参数,主要是均值和协方差矩阵(协方差矩阵表征了当前小格子中点分布的平滑性和方向)
(2)通过转换矩阵T将浮动点云(moving cloud)变换到(1)中分成的小格子中,然后计算每个变换点在小格子中的概率,这个概率是该变换点在周围邻近小格子中概率之和,最后通过最大似然估计原理,将每个变换点的概率相乘得到最终的目标函数。
(3)使用牛顿迭代法求解变换矩阵,查看是否满足收敛条件,不满足,则转到(2)中。
4.5.2适用范围
这种方法相对于icp等算法,具有更好的鲁棒性,但也会受到初始条件的影响,主要通过计算概率分布作为主要的收敛目标,其应该能达到较好的形状匹配,可用于精确配准。
4.5.3一些质量较高的参考链接
(1)学习教程:点云匹配-正态分布变换NDT(Normal Distributions Transform)算法_哔哩哔哩_bilibili
(2)
点云 | 配准之NDT算法漫谈 - 墨天轮
(3)https://www.youtube.com/watch?v=MLpaC-ZG2RA
4.6 4PCS算法
没时间写了,有时间再写。
5.总结
通过这个项目,把点云配准中几个具有代表性的算法进行了梳理,小有收获。
6.其他参考文献:
[1] Lorensen, W. E. and H. E. Cline(1987). “Marching cubes: A high resolution 3D surface construction algorithm.” Computers & Graphics.
[2]【泡泡点云时空-PCL源码解读】PCL中的点云配准方法_算法