安装zed-ros-wrapper 并解决一些报错
创建工作空间
如果没有工作空间,先根据如下命令建立工作空间
source /opt/ros/melodic/setup.bash
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
source devel/setup.bash
echo $ ROS_PACKAGE_PATH/home/huang/catkin_ws/src:/opt/ros/melodic/share安装zed-ros-wrapper
cd ~/catkin_ws/src
git clone --recursive https://github.com/stereolabs/zed-ros-wrapper.git
cd ../
rosdep install --from-paths src --ignore-src -r -y
catkin_make -DCMAKE_BUILD_TYPE=Release
source ./devel/setup.bash注:在执行上述与catkin_make有关的编译命令时,可能会出现如下报错:
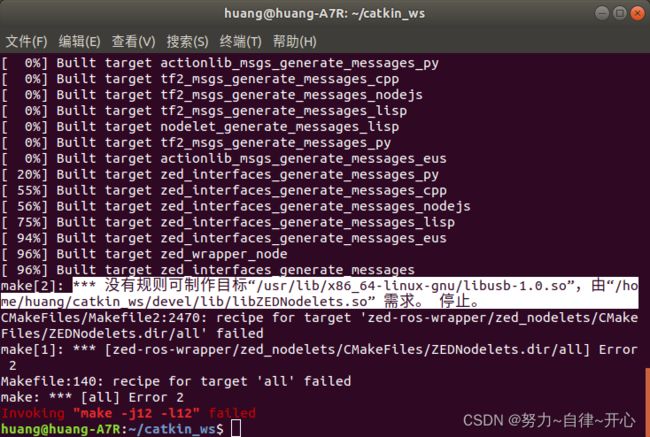
Invoking "make -j12 -l12" failed
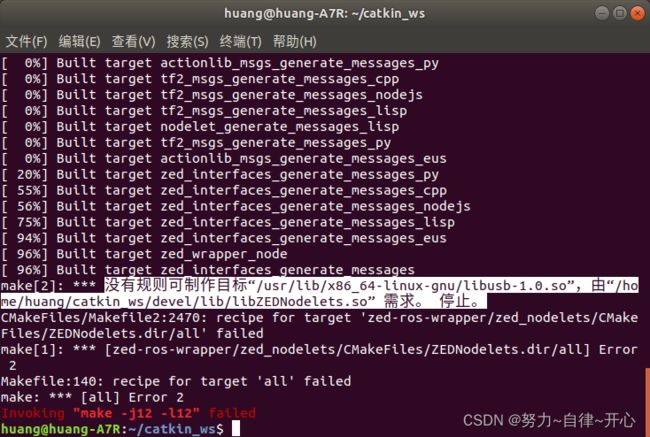
向上查找原因发现出现如下两个错误
- ModuleNotFoundError: No module named ‘em’:
而且执行了命令python -m pip install empy、pip install em,仍然不能直接解决问题
解决方法:
运行了python -m pip install empy命令后,发现empy是成功地安装在了/usr/lib/python2.7/dist-packages/em.py中,而不是编译时报错的/opt/ros/kinetic/lib/python2.7/dist-packages/中,因此尝试是否可以将empy.py文件从/usr复制到/ros中去:
执行如下命令即可:
sudo cp /usr/lib/python2.7/dist-packages/em.py /opt/ros/melodic/lib/python2.7/dist-packages/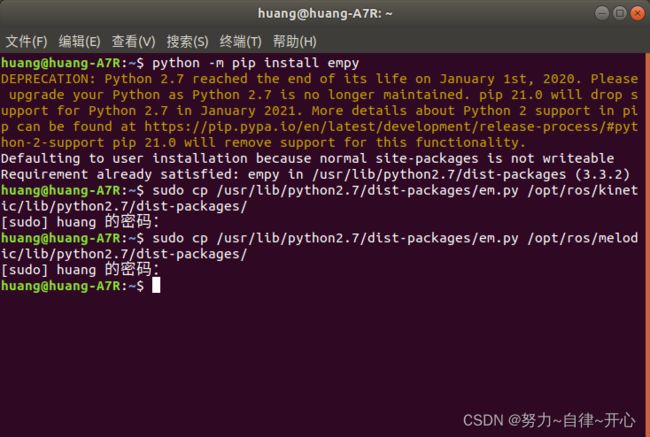
编译后发现此错误消失
- *** 没有规则可制作目标“/usr/lib/x86_64-linux-gnu/libusb-1.0.so”,由“/home/huang/catkin_ws/devel/lib/libZEDNodelets.so” 需求。 停止。
原因:
- 在原本的共享链接库路径下找不到原本的链接库文件.so
- 或该文件断开链接
参考文档:文档1 文档2
解决方法:
先通过locate命令查找该.so文件的存储位置
#locate 'xxx.so'
locate 'libusb-1.0.so'
找到.so文件后,不论是两种情况的哪一种(在报错目标目录不存在/存在但链接断开),均可通过一条命令进行解决
源文件可为locate命令查到的(除了报错的目标文件)其中一个
sudo ln -s 源文件 目标文件sudo ln -s /lib/x86_64-linux-gnu/libusb-1.0.so.0.1.0 /usr/lib/x86_64-linux-gnu/libusb-1.0.so
再次执行编译命令 catkin_make -DCMAKE_BUILD_TYPE=Release
编译成功

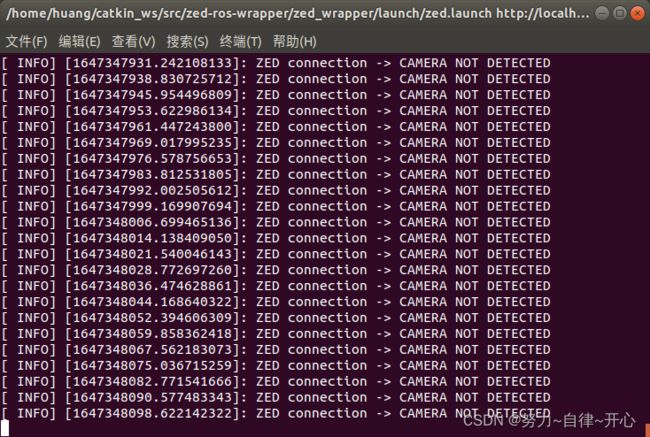
启动 ZED 节点
roslaunch zed_wrapper zed.launch如果出现如下报错:
[xxx.launch] is neither a launch file in package [xxxx] nor is [xxxx] a launch file name.

这个错误的原因是没有把launch文件添加到路径中。
解决方法:
1.重新打开一个终端
cd catkin_ws/2.添加文件到路径中
source devel/setup.bash3.重新编译
catkin_make4.运行launch文件
roslaunch zed_wrapper zed.launch运行成功
安装zed-ros-interfaces
cd ~/catkin_ws/src
git clone https://github.com/stereolabs/zed-ros-interfaces.git
cd ../
rosdep install --from-paths src --ignore-src -r -y
catkin_make -DCMAKE_BUILD_TYPE=Release
source ./devel/setup.bash注:
如果zed-ros-wrapper里面有zed-ros-interfaces,需要删掉src内的,否则提示重名,编译失败
安装zed-ros-examples
cd ~/catkin_ws/src
git clone https://github.com/stereolabs/zed-ros-examples.git
cd ../
rosdep install --from-paths src --ignore-src -r -y
catkin_make -DCMAKE_BUILD_TYPE=Release
source ./devel/setup.bash显示 ZED 数据
使用 RVIZ,RVIZ是ROS中一个有用的可视化工具。使用 RVIZ,您可以可视化 ZED 左右图像、深度、点云和 3D 轨迹。
安装了 zed-ros-examples 存储库,可用以下命令启动 ZED 包装器和 RVIZ
cd catkin_ws/
source devel/setup.bash
catkin_make #只有第一次启动需要
roslaunch zed_display_rviz display_zed.launch