Elasticsearch基础整理-Elasticsearch Lucene 数据写入原理
ES基础
数据模型
逻辑概念
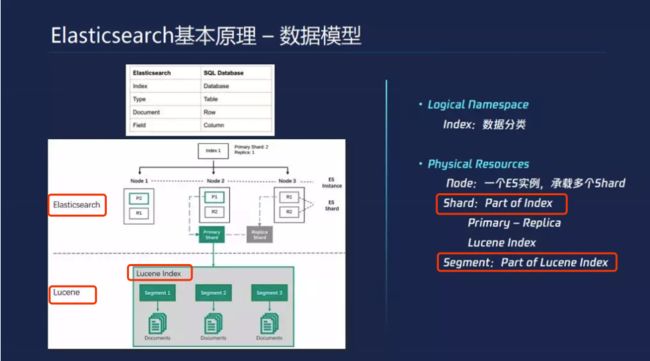
ES本身是schema less的,有比较特殊的字段需要通过Mapping设置一下,每个数据点就是一行数据Document,ES数据分类通过Index这层完成的
Elassticsearch的基础概念-数据模型,如上图把ES数据模型概念和传统数据库做了对比。
- index 对应db 库database库
- type 对应db 表table表(废弃)
- doc 对应db 行 row
- field 对应db 字段 column
物理存储
首先分为两层,一个是ES,下面是Lucene,一个ES集群有多个node组成的。一个ES实例会承载一些Shard,多个shard会落到不同机器上面,P1和P2是两个不同的Shard,并且shard有主从的概念,对于ES每个Shard落地下来是一个Lucene Index。
节点(Node)
单个实例的ES主机称为节点,它是集群的一个成员,可以存储数据、参与集群索引及搜索操作。类似于集群,节点靠其名称进行标识,默认为启动时自动生成的随机Marvel字符名称。用户可以按需要自定义任何希望使用的名称,但出于管理的目的,此名称应该尽可能有较好的识别性。节点通过为其配置的ES集群名称确定其所要加入的集群。
分片(Shard)和副本(Replica)
ES的“分片(shard)”机制可将一个索引内部的数据分布地存储于多个节点,它通过将一个索引切分为多个底层物理的Lucene索引完成索引数据的分割存储功能,这每一个物理的Lucene索引称为一个分片(shard)。每个分片其内部都是一个全功能且独立的索引,因此可由集群中的任何主机存储。创建索引时,用户可指定其分片的数量,默认数量为5个。
Shard有两种类型:primary和replica,即主shard及副本shard。Primary shard用于文档存储,每个新的索引会自动创建5个Primary(最新版改成1个了) shard,当然此数量可在索引创建之前通过配置自行定义,不过,一旦创建完成,其Primary shard的数量将不可更改。Replica shard是Primary Shard的副本,用于冗余数据及提高搜索性能。每个Primary shard默认配置了一个Replica shard,但也可以配置多个,且其数量可动态更改。ES会根据需要自动增加或减少这些Replica shard的数量。
ES集群可由多个节点组成,各Shard分布式地存储于这些节点上。
ES可自动在节点间按需要移动shard,例如增加节点或节点故障时。简而言之,分片实现了集群的分布式存储,而副本实现了其分布式处理及冗余功能。
数据持久化

原理部分
一、Elasticsearch & Lucene 是什么
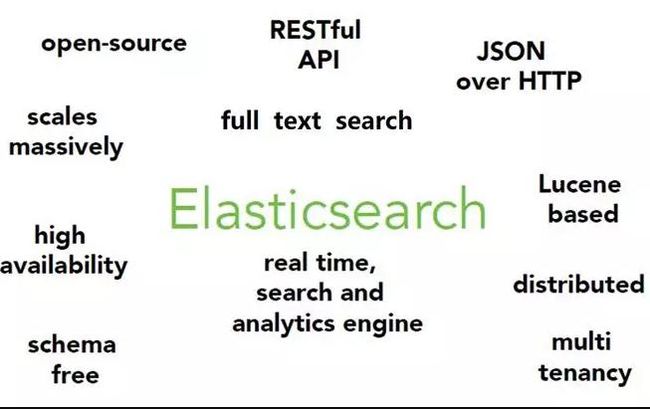
什么是 Elasticsearch ? Elasticsearch 是一个基于 Apache Lucene(TM) 的开源搜索引擎。
那 Lucene 是什么? 无论在开源还是专有领域,Lucene 可以被认为是迄今为止最先进、性能最好的、功能最全的搜索引擎库,并通过简单的 RESTful API 来隐藏 Lucene 的复杂性,从而让全文搜索变得简单。
Elasticsearch 不仅仅是 Lucene 和全文搜索,我们还能这样去描述它:
- 分布式的实时文件存储,每个字段都被索引并可被搜索
- 分布式的实时分析搜索引擎
- 可以扩展到上百台服务器,处理 PB 级结构化或非结构化数据
二、Elasticsearch & Lucene 的关系
就像很多业务系统是基于 Spring 实现一样,Elasticsearch 和 Lucene 的关系很简单:Elasticsearch 是基于 Lucene 实现的。ES 基于底层这些包,然后进行了扩展,提供了更多的更丰富的查询语句,并且通过 RESTful API 可以更方便地与底层交互。类似 ES 还有 Solr 也是基于 Lucene 实现的。
在应用开发中,用 Elasticsearch 会很简单。但是如果你直接用 Lucene,会有大量的集成工作。
因此,入门 ES 的同学,稍微了解下 Lucene 即可。如果往高级走,还是需要学习 Lucene 底层的原理。因为倒排索引、打分机制、全文检索原理、分词原理等等,这些都是不会过时的技术。
三、新文档写入流程
3.1 数据模型
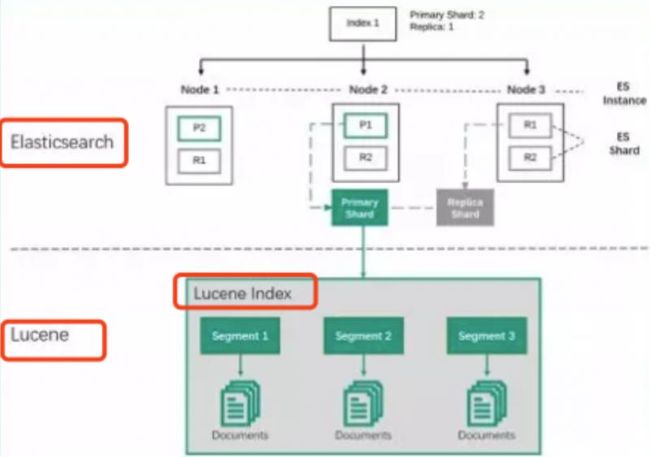
- 一个 ES Index (索引,比如商品搜索索引、订单搜索索引)集群下,有多个 Node (节点)组成。每个节点就是 ES 的实例。
- 每个节点上会有多个 shard (分片), P1 P2 是主分片 R1 R2 是副本分片
- 每个分片上对应着就是一个 Lucene Index(底层索引文件)
- Lucene Index 是一个统称。由多个 Segment (段文件,就是倒排索引)组成。每个段文件存储着就是 Doc 文档。
3.2 Lucene Index
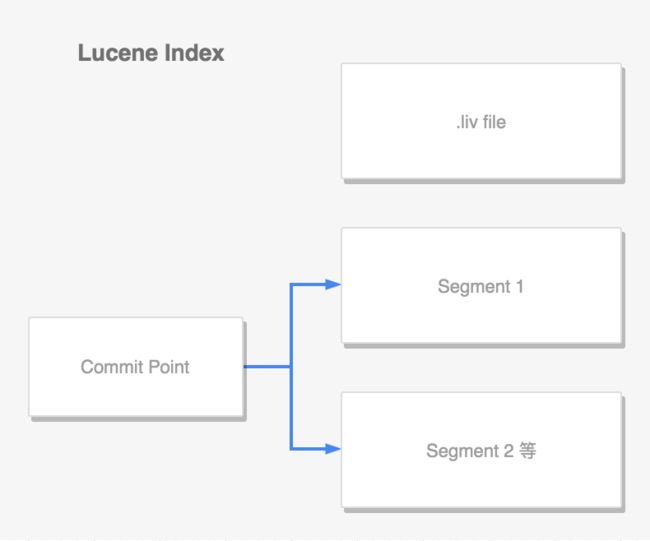
lucene 中,单个倒排索引文件称为 segment。其中有一个文件,记录了所有 segments 的信息,称为 commit point:
- 文档 create 新写入时,会生成新的 segment。同样会记录到 commit point 里面
- 文档查询,会查询所有的 segments
- 当一个段存在文档被删除,会维护该信息在 .liv 文件里面
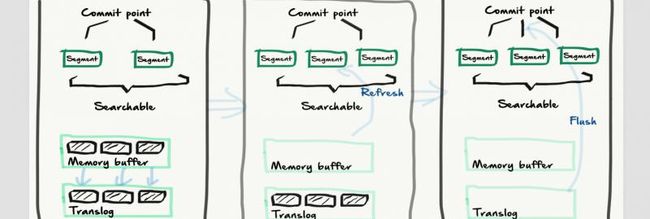
3.3 新文档写入流程
新文档创建或者更新时,进行如下流程:
更新不会修改原来的 segment,更新和创建操作都会生成新的一个 segment。数据哪里来呢?先会存在内存的 bugger 中,然后持久化到 segment 。
数据持久化步骤如下:write -> refresh -> flush -> merge
3.3.1 write 过程
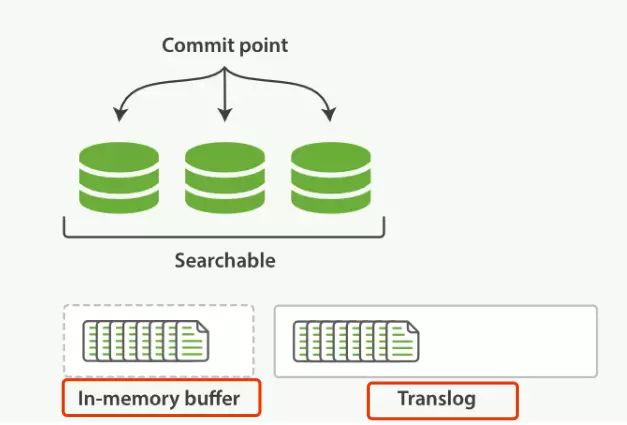
一个新文档过来,会存储在 in-memory buffer 内存缓存区中,顺便会记录 Translog。
这时候数据还没到 segment ,是搜不到这个新文档的。数据只有被 refresh 后,才可以被搜索到。那么 讲下 refresh 过程
3.3.2 refresh 过程

refresh 默认 1 秒钟,执行一次上图流程。ES 是支持修改这个值的,通过 index.refresh_interval 设置 refresh (冲刷)间隔时间。refresh 流程大致如下:
- in-memory buffer 中的文档写入到新的 segment 中,但 segment 是存储在文件系统的缓存中。此时文档可以被搜索到
- 最后清空 in-memory buffer。注意: Translog 没有被清空,为了将 segment 数据写到磁盘
文档经过 refresh 后, segment 暂时写到文件系统缓存,这样避免了性能 IO 操作,又可以使文档搜索到。refresh 默认 1 秒执行一次,性能损耗太大。一般建议稍微延长这个 refresh 时间间隔,比如 5 s。因此,ES 其实就是准实时,达不到真正的实时。
3.3.3 flush 过程
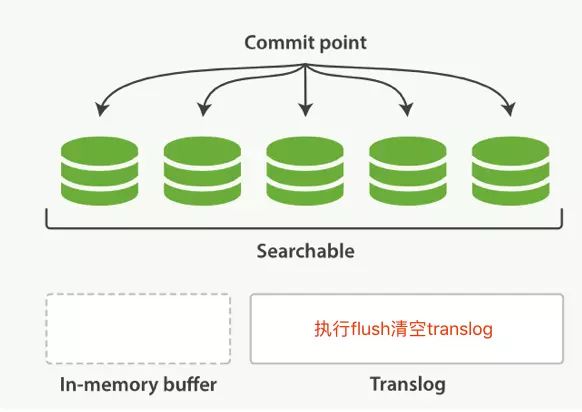
上个过程中 segment 在文件系统缓存中,会有意外故障文档丢失。那么,为了保证文档不会丢失,需要将文档写入磁盘。那么文档从文件缓存写入磁盘的过程就是 flush。写入次怕后,清空 translog。
translog 作用很大:
- 保证文件缓存中的文档不丢失
- 系统重启时,从 translog 中恢复
- 新的 segment 收录到 commit point 中
具体可以看官方文档:https://www.elastic.co/guide/en/elasticsearch/reference/7.3/indices-flush.html
3.3.4 merge 过程
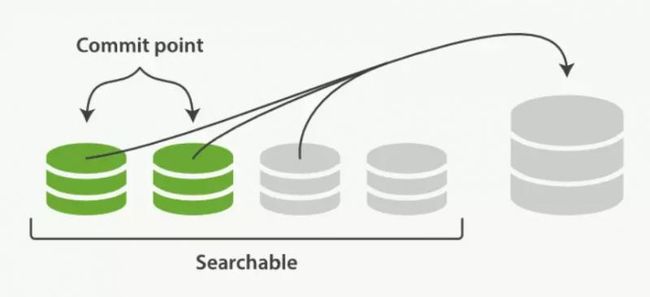
上面几个步骤,可见 segment 会越来越多,那么搜索会越来越慢?怎么处理呢?
通过 merge 过程解决:
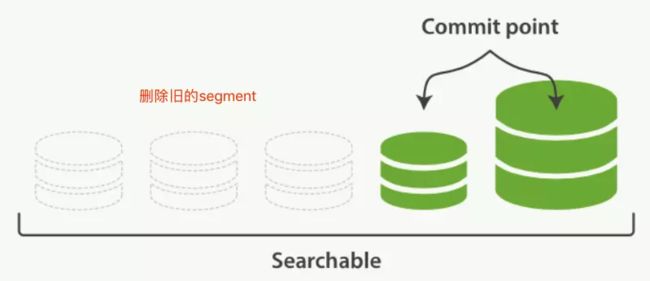
- 就是各个小段文件,合并成一个大段文件。段合并过程
- 段合并结束,旧的小段文件会被删除
- .liv 文件维护的删除文档,会通过这个过程进行清除
3.3.5 Translog
Lucence基于节点宕机的考虑,每次写入都会落盘Translog,类似db binlog,不同的是db binlog 通过expire_logs_days=7 设定过期时间以天为单位 默认7天
而translog 是每次flush后会清除 可以通过几个维度的设定清除策略
- index.translog.flush_threshold_ops,执行多少次操作后执行一次flush,默认无限制
- index.translog.flush_threshold_size,translog的大小超过这个参数后flush,默认512mb
- index.translog.flush_threshold_period,多长时间强制flush一次,默认30m
- index.translog.interval,es多久去检测一次translog是否满足flush条件
translog日志提供了一个所有还未被flush到磁盘的操作的持久化记录。当ES启动的时候,它会使用最新的commit point从磁盘恢复所有已有的segments,然后将重现所有在translog里面的操作来添加更新,这些更新发生在最新的一次commit的记录之后还未被fsync。
translog日志也可以用来提供实时的CRUD。当你试图通过文档ID来读取、更新、删除一个文档时,它会首先检查translog日志看看有没有最新的更新,然后再从响应的segment中获得文档。这意味着它每次都会对最新版本的文档做操作,并且是实时的。
理论上设定好这个过期策略,在flush之前把translog拿到后做双机房同步或者进一步的消息通知处理,还可以有很大作为,可行性还有待尝试。
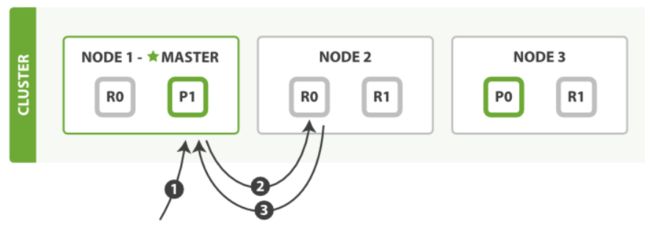
3.3.6 写操作
主分片+至少一个副分片全部写成功后才返回成功

具体流程:
- 客户端向node1发起写入文档请求
- Node1根据文档ID(_id字段)计算出该文档属于分片shard0,然后将请求路由到Node3 的主分片P0上
路由公式 shard = hash(routing) % number_of_primary_shards
Node3在p0上执行了写入请求后,如果成功则将请求并行的路由至Node1 Node2它的副本分片R0上,且都成功后Node1再报告至client
wait_for_active_shards 来配置副本分配同步策略 - 设置为1 表示仅写完主分片就返回 - 设置为all 表示等所有副本分片都写完才能返回 - 设置为1-number_of_replicas+1之间的数值,比如2个副本分片,有1个写成功即可返回 timeout 控制集群异常副本同步分片不可用时候的等待时间
读操作
一个文档可以在任意主副分片上读取
读取流程:
- 客户端发起读请求到Node1
- Node1根据文档ID(_id字段)计算出该文档属于分片shard0,在所有节点上都有,这次它根据负载均衡将请求路由至Node2
- Node2将文档返回给Node1,Node1将文档返回给client
更新操作
更新操作其实就是先读然后写
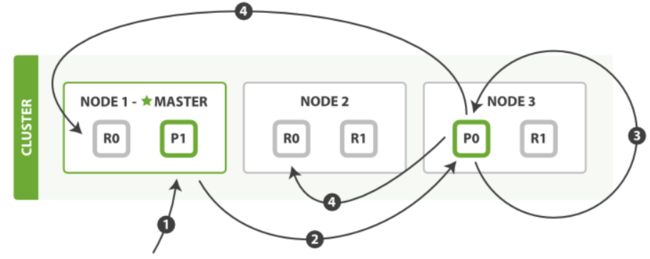
更新流程:
- 客户端将更新请求发给Node1
- Node1根据文档ID(_id字段)计算出该文档属于分片shard0,而其主分片在Node上,于是将请求路由到Node3
- Node3从p0读取文档,改变source字段的json内容,然后将修改后的数据在P0重新做索引。如果此时该文档被其他进程修改,那么将重新执行3步骤,这个过程如果超过retryon_confilct设置的重试次数,就放弃。
- 如果Node3成功更新了文档,它将并行的将新版本的文档同步到Node1 Node2的副本分片上重新建立索引,一旦所有的副本报告成功,Node3向被请求的Node1节点返回成功,然后Node1向client返回成功
更新和删除
由于segments是不变的,所以文档不能从旧的segments中删除,也不能在旧的segments中更新来映射一个新的文档版本。取之的是,每一个提交点都会包含一个.del文件,列举了哪一个segment的哪一个文档已经被删除了。 当一个文档被”删除”了,它仅仅是在.del文件里被标记了一下。被”删除”的文档依旧可以被索引到,但是它将会在最终结果返回时被移除掉。
文档的更新同理:当文档更新时,旧版本的文档将会被标记为删除,新版本的文档在新的segment中建立索引。也许新旧版本的文档都会本检索到,但是旧版本的文档会在最终结果返回时被移除。
四、小结
如这个图,ES 写入原理不难,记住关键点即可。
write -> refresh -> flush
- write:文档数据到内存缓存,并存到 translog
- refresh:内存缓存中的文档数据,到文件缓存中的 segment 。此时可以被搜到
- flush 是缓存中的 segment 文档数据写入到磁盘
写入的原理告诉我们,考虑的点很多:性能、数据不丢失等等