mimo信道学习
1 MIMO信道
MIMO无线信道的数学模型中,![]() 是发射端第 i 根天线和接收端第 j 根天线的复信道增益,该增益来源于多条射线的叠加,每条射线是经过多条不同的路径到达接收机的
是发射端第 i 根天线和接收端第 j 根天线的复信道增益,该增益来源于多条射线的叠加,每条射线是经过多条不同的路径到达接收机的
信道增益的模![]() 服从瑞利分布,如果除了大量的散射体还有一个很强的直射LoS路径,则信道增益的模
服从瑞利分布,如果除了大量的散射体还有一个很强的直射LoS路径,则信道增益的模![]() 服从莱斯分布
服从莱斯分布
![]() 是发射端第 i 根天线和接收端第 j 根天线之间的子信道,也是由一堆不同的路径叠加而成的,而不是仅指一条路径!
是发射端第 i 根天线和接收端第 j 根天线之间的子信道,也是由一堆不同的路径叠加而成的,而不是仅指一条路径!
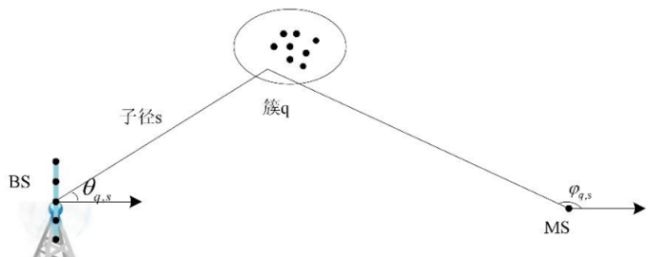
毫米波相关论文最常使用的毫米波信道模型都是基于Saleh-Valenzuela模型,包含一堆方位角、俯仰角之类。毫米波绕射能力差,路径稀疏,信道模型具有丰富的几何特征。
毫米波信道与低频信道不同,由于毫米波基本沿直线传播,绕射能力差,其信道的散射路径较少,往往远少于发射和接收天线的数量,因此其信道模型具有丰富的几何特征。而低频信道由于散射路径丰富,往往建模成随机信道比如瑞利分布,因此并不包含通信环境的信息。
2 均匀线性阵列(Uniform Linear Array, ULA)
2D MIMO 通信系统发射天线是线性天线,它形成的波束较宽,只有水平维度的方向,没有垂直维度的方向。这样每条子径包含发射端的出发角 AoD(Angle of Departure),接收端的到达角 AoA(Angle of Arrival)以及时延 三个特征变量。
3 均匀平面阵列(Uniform Planar Array, UPA)
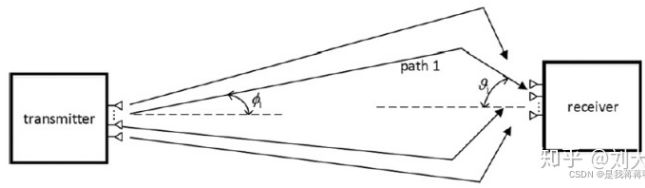
3D MIMO 通信系统一般在基站端配备大规模的均匀平面天线阵列 。3D MIMO 通信系统基站端配备的天线元件多,且相对于 2D MIMO 通信系统新增加了垂直方向的天线自由度,即系统可以同时在水平维和垂直维上灵活精确调整波束方向,这样发射端可以形成更窄、更精确的波束,具有很高的指向性。 此时描述子径的应该是离开和到达的方位角,仰角

4 毫米波信道模型
(1)发射端和接收端均采用ULA
假设只有 L 条散射路径。经典的 Saleh-Valenzuela (S-V) 信道模型,假设发射天线有![]()
根,接受天线有![]() 根,则L条散射路径的归一化窄带毫米波信道可以表示为:
根,则L条散射路径的归一化窄带毫米波信道可以表示为:

![]() 代表第 ℓ 条路径的衰落系数,一般建模为高斯分布。
代表第 ℓ 条路径的衰落系数,一般建模为高斯分布。
![]() 分别是第 ℓ 条路径的到达角 AoA 和出发角 AoD,一般简化假设在
分别是第 ℓ 条路径的到达角 AoA 和出发角 AoD,一般简化假设在![]() 内均匀分布。
内均匀分布。
![]() 是天线阵列的方向矢量(steering vector),又称为 array response,当天线为 N 维 ULA 时,归一化的方向矢量表达式为:
是天线阵列的方向矢量(steering vector),又称为 array response,当天线为 N 维 ULA 时,归一化的方向矢量表达式为:

![]() 表示的是第 ℓ 径接收端的方向矢量,是
表示的是第 ℓ 径接收端的方向矢量,是![]() 维的向量;
维的向量;![]() 表示第 ℓ 径的发射端的方向矢量,是
表示第 ℓ 径的发射端的方向矢量,是 ![]() 维的向量;
维的向量;
![]() 维的矩阵; 把这些所有 L条路径相加,也就是我们的信道矩阵。
维的矩阵; 把这些所有 L条路径相加,也就是我们的信道矩阵。
MIMO信道收发端都是 ULA天线阵列的时候,steering vector(方向矢量)如上所示,但对于 MISO (SIMO) 模型,接收端(发射端)只有一个天线的话应该就不用考虑接收端(发射端)的方向矢量了。
(2)发射端和接收端均为 UPA
假设有 ![]() 个散射簇,每个散射簇中包含
个散射簇,每个散射簇中包含![]() 条传播路径。窄带毫米波信道表示为:
条传播路径。窄带毫米波信道表示为:

![]() 代表第i个散射簇中第 ℓ 条路径的衰落系数。
代表第i个散射簇中第 ℓ 条路径的衰落系数。
![]() 代表接收端的方向角和俯仰角。
代表接收端的方向角和俯仰角。![]() 表示方向角和俯仰角在接收端的归一化天线阵列响应向量。
表示方向角和俯仰角在接收端的归一化天线阵列响应向量。
![]() 代表发射端的方向角和俯仰角,
代表发射端的方向角和俯仰角,![]() 表示方向角和俯仰角在发射端的归一化天线阵列响应向量。
表示方向角和俯仰角在发射端的归一化天线阵列响应向量。
针对该图 UPA放置在 X-Z 平面上的情形,发射端 UPA天线阵列的归一化响应向量可以表示为

N 为均匀平面阵列的天线元素个数,x 轴和 z 轴上分别有![]() 个天线元素,d 是天线间隔。该表达式还可以写为克罗内克积的形式,更简洁。
个天线元素,d 是天线间隔。该表达式还可以写为克罗内克积的形式,更简洁。
针对UPA来说,steering vector 和俯仰角的关系取决于UPA的在三维坐标中的放置,下面给出 UPA 放置在Y-Z平面 和 X-Y平面的两种情形。(IRS放置不同对信道估计的影响)
X-Y平面放置IRS的情形:
UAV 端的 UPA 天线阵列的归一化响应向量 [5] 可以表示为:

![]() 分别表示X和Y轴上的天线之间的间距,一般取 d = 0.5λ
分别表示X和Y轴上的天线之间的间距,一般取 d = 0.5λ
毫米波信道学习记录_Dr. Wenny的博客-CSDN博客_毫米波信道
代码实现:
- 实现单侧UPA的天线响应向量的仿真函数
function y = array_response(phi,theta, N)
for m= 0:sqrt(N)-1 % IRS is square array (N elements)
for n= 0:sqrt(N)-1
y(m*(sqrt(N))+n+1) = exp( 1i* pi* ( m*sin(phi)*sin(theta) + n*cos(theta) ) ); % 各个方向的角度的响应用矩阵表示
end
end
y = y.'/sqrt(N); % 取共轭转置
end
- BS-IRS 信道生成函数 (IRS - UE的信道生成同理)
function H = generate_channel(Nt, Nr, L)
AoD = pi*rand(L, 2) - pi/2; % -2/pi~2/pi (generating the angles of departure for L paths)
AOA = pi*rand(L, 2) - pi/2; % -2/pi~2/pi (generating the angles of arrival for L paths)
alpha(1) = 1; % gain of the LoS
alpha(2:L) = 10^(-0.5)*(randn(1,L-1)+1i*randn(1,L-1))/sqrt(2); % gains of the NLoS
H = zeros(Nr, Nt);
for l=1:1:L
ar = array_response(AOA(L,1),AOA(L,2), Nr);
at = array_response(AOD(L,1),AOD(L,2), Nt);
H = H + sqrt(Nr * Nt)*alpha(l)*ar*at';
end