Matlab实现|多元宇宙算法求解电力系统多目标优化问题(期刊论文复现)
结果和这几种算法进行比较:
目录
1 概述
2 Matlab完整代码实现
3 结果
1 概述

提出了一种求解电力系统环境经济调度的新方法,该方法利用宇宙空间在随机创建过程中高膨胀率的物体随虫洞在空间移动物体的规律,通过对白洞和黑洞间随机传送物体来实现最优搜索.
算法具有运算速度快,收敛性强,适用于高维计算等特点.以总燃料费用最低和总污染排放最少为多目标建立环境经济调度模型,最后,通过发电厂传统10机组算例进行仿真.结果表明:本文所提算法具有经济性和有效性.
2 Matlab代码实现
clc;
clear;
close all;
tStart=tic;
% global costdata emissiondata B B0 B00 Pd VarMin VarMax nVar
global data B B0 B00 Pd VarMin VarMax nVar
Pd=2000;
data=xlsread('IEEE10.xls');
B1=xlsread('B10.xls');
B=B1(1:10,1:10);
B0=[0 0 0 0 0 0 0 0 0 0];
B00=0;
% B=B1(1:3,1:3);
% B0=[0 0 0 0 0 0 0 0 0 0];
% B00=0;
%%
Max_time=600; %迭代次数
N=100;
ArchiveMaxSize=100;
% max_iter=Max_time;
nVar=10; % 机组个数
VarSize=[1 nVar]; % 决策变量矩阵的大小
VarMin=data(:,2); %机组出力下限
VarMax= data(:,3); % 机组出力上限
fobj=@(x) IEEE3aobj(x);
dim=nVar;
lb=VarMin';
ub=VarMax';
obj_no=2;
Best_universe=zeros(1,dim);
Best_universe_Inflation_rate=inf*ones(1,obj_no);
Archive_X=zeros(ArchiveMaxSize,dim);
Archive_F=ones(ArchiveMaxSize,obj_no)*inf;
Archive_member_no=0;
WEP_Max=1;
WEP_Min=0.2;
for i=1:N
Universes(i,:)=lcheck3;
end
Time=1;
while Timeub;
Flag4lb=Universes(i,:)ArchiveMaxSize
Archive_mem_ranks=RankingProcess(Archive_F, ArchiveMaxSize, obj_no);
[Archive_X, Archive_F, Archive_mem_ranks, Archive_member_no]=HandleFullArchive(Archive_X, Archive_F, Archive_member_no, Archive_mem_ranks, ArchiveMaxSize);
else
Archive_mem_ranks=RankingProcess(Archive_F, ArchiveMaxSize, obj_no);
end
Archive_mem_ranks=RankingProcess(Archive_F, ArchiveMaxSize, obj_no);
% 提高复盖率
index=RouletteWheelSelection(1./Archive_mem_ranks);
if index==-1
index=1;
end
Best_universe_Inflation_rate=Archive_F(index,:);
Best_universe=Archive_X(index,:);
%更新宇宙的位置
for i=2:size(Universes,1)%从2开始,因为第1位是精英
Back_hole_index=i;
for j=1:size(Universes,2)
r1=rand();
if r10.5
Universes(i,j)=Best_universe(1,j)-TDR*((ub-lb)*rand+lb);
end
end
end
if (size(lb',1)~=1)
%公式( 3.2 )在原始MVO论文中,如果对每个变量的上下界不同
r2=rand();
if r20.5
Universes(i,j)=Best_universe(1,j)-TDR*((ub(j)-lb(j))*rand+lb(j));
end
end
end
end
Universes(i,:)=lbcoff3bus(Universes(i,:));
end
display(['At the iteration ', num2str(Time), ' there are ', num2str(Archive_member_no), ' non-dominated solutions in the archive']);
Time=Time+1;
%
end
plot(Archive_F(:,1),Archive_F(:,2),'Ro','LineWidth',2,...
'MarkerEdgeColor','r',...
'MarkerFaceColor','r',...
'MarkerSize',2);
xlabel('污染排放量')
ylabel('煤耗量')
title('Pareto最前沿')
% Universes
Archive_F(:,1)
Archive_F(:,2)
Best_universe clc;
clear;
close all;
tStart=tic;
% global costdata emissiondata B B0 B00 Pd VarMin VarMax nVar
global data B B0 B00 Pd VarMin VarMax nVar
Pd=2000;
data=xlsread('IEEE10.xls');
B1=xlsread('B10.xls');
B=B1(1:10,1:10);
B0=[0 0 0 0 0 0 0 0 0 0];
B00=0;
% B=B1(1:3,1:3);
% B0=[0 0 0 0 0 0 0 0 0 0];
% B00=0;
%%
Max_time=600; %迭代次数
N=100;
ArchiveMaxSize=100;
% max_iter=Max_time;
nVar=10; % 机组个数
VarSize=[1 nVar]; % 决策变量矩阵的大小
VarMin=data(:,2); %机组出力下限
VarMax= data(:,3); % 机组出力上限
fobj=@(x) IEEE3aobj(x);
dim=nVar;
lb=VarMin';
ub=VarMax';
obj_no=2;
Best_universe=zeros(1,dim);
Best_universe_Inflation_rate=inf*ones(1,obj_no);
Archive_X=zeros(ArchiveMaxSize,dim);
Archive_F=ones(ArchiveMaxSize,obj_no)*inf;
Archive_member_no=0;
WEP_Max=1;
WEP_Min=0.2;
for i=1:N
Universes(i,:)=lcheck3;
end
Time=1;
while Time
TDR=1-((Time)^(1/6)/(Max_time)^(1/6));
for i=1:size(Universes,1)
%边界检查(如果宇宙超出边界,则将它们带回搜索空间内)
Flag4ub=Universes(i,:)>ub;
Flag4lb=Universes(i,:)
Universes(i,:)=lbcoff3bus(Universes(i,:));
%计算宇宙的通货膨胀率(适合度)
Inflation_rates(i,:)=fobj(Universes(i,:));
%精英主义
if dominates(Inflation_rates(i,:),Best_universe_Inflation_rate)
Best_universe_Inflation_rate=Inflation_rates(i,:);
Best_universe=Universes(i,:);
end
end
[sorted_Inflation_rates,sorted_indexes]=sort(Inflation_rates);
for newindex=1:N
Sorted_universes(newindex,:)=Universes(sorted_indexes(newindex),:);
end
%原始MVO论文中的标准化通货膨胀率
normalized_sorted_Inflation_rates=normr(sorted_Inflation_rates);
Universes(1,:)= Sorted_universes(1,:);
% Universes(1,:)=lchecktf1(Universes(1,:));
[Archive_X, Archive_F, Archive_member_no]=UpdateArchive(Archive_X, Archive_F, Universes, Inflation_rates, Archive_member_no);
if Archive_member_no>ArchiveMaxSize
Archive_mem_ranks=RankingProcess(Archive_F, ArchiveMaxSize, obj_no);
[Archive_X, Archive_F, Archive_mem_ranks, Archive_member_no]=HandleFullArchive(Archive_X, Archive_F, Archive_member_no, Archive_mem_ranks, ArchiveMaxSize);
else
Archive_mem_ranks=RankingProcess(Archive_F, ArchiveMaxSize, obj_no);
end
Archive_mem_ranks=RankingProcess(Archive_F, ArchiveMaxSize, obj_no);
% 提高复盖率
index=RouletteWheelSelection(1./Archive_mem_ranks);
if index==-1
index=1;
end
Best_universe_Inflation_rate=Archive_F(index,:);
Best_universe=Archive_X(index,:);
%更新宇宙的位置
for i=2:size(Universes,1)%从2开始,因为第1位是精英
Back_hole_index=i;
for j=1:size(Universes,2)
r1=rand();
if r1
if White_hole_index==-1
White_hole_index=1;
end
%Eq. (3.1)
Universes(Back_hole_index,j)=Sorted_universes(White_hole_index,j);
% Universes(Back_hole_index,j)=lchecktf1(Universes(Back_hole_index,j));
end
if (size(lb',1)==1)
%如果边界都是一样的,那么原MVO论文中的公式(3.2)就会出现
r2=rand();
if r2
if r3<0.5
Universes(i,j)=Best_universe(1,j)+TDR*((ub-lb)*rand+lb);
end
if r3>0.5
Universes(i,j)=Best_universe(1,j)-TDR*((ub-lb)*rand+lb);
end
end
end
if (size(lb',1)~=1)
%公式( 3.2 )在原始MVO论文中,如果对每个变量的上下界不同
r2=rand();
if r2
if r3<0.5
Universes(i,j)=Best_universe(1,j)+TDR*((ub(j)-lb(j))*rand+lb(j));
end
if r3>0.5
Universes(i,j)=Best_universe(1,j)-TDR*((ub(j)-lb(j))*rand+lb(j));
end
end
end
end
Universes(i,:)=lbcoff3bus(Universes(i,:));
end
display(['At the iteration ', num2str(Time), ' there are ', num2str(Archive_member_no), ' non-dominated solutions in the archive']);
Time=Time+1;
%
end
plot(Archive_F(:,1),Archive_F(:,2),'Ro','LineWidth',2,...
'MarkerEdgeColor','r',...
'MarkerFaceColor','r',...
'MarkerSize',2);
xlabel('污染排放量')
ylabel('煤耗量')
title('Pareto最前沿')
% Universes
Archive_F(:,1)
Archive_F(:,2)
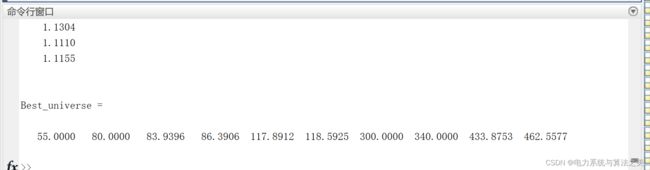
Best_universe
3 结果

现代这种“探索、征服”的心态,从世界地图的演变可以看得一目了然。早在历史进到现代之前,许多文化就已经有了自己的世界地图。当然,当时并没有人真正知道全世界是什么样子,在亚非大陆上的人对美洲一无所知,美洲文化也不知道亚非大陆上的情形。但碰到不熟悉的地区,地图上不是一笔未提,就是画上了想象出来的怪物和奇景。这些地图上并没有空白的空间,让人觉得全世界就在自己的掌握之中。
在15、16世纪,欧洲人的世界地图开始出现大片空白。从这点可以看出科学心态的发展,以及欧洲帝国主义的动机。地图上的空白可以说是在心理及思想上的一大突破,清楚表明欧洲人愿意承认自己对于一大部分的世界还一无所知。
图1 1459年欧洲人的世界地图。可以看到地图上似乎巨细靡遗,就算是当时欧洲人根
本一无所知的南非地区,都有密密麻麻的信息。
1492年,哥伦布从西班牙出发向西航行,希望能找到一条前往东亚的新航线。哥伦布当时相信的仍然是旧的世界地图,以为全世界在地图上一览无遗。哥伦布从旧地图推算,日本应该位于西班牙以西大约7000公里远。但事实上,从西班牙到东亚的距离要超过两万公里,而且中间还隔着个他不知道的美洲大陆。1492年10月12日大约凌晨2点,哥伦布一行人与这片未知大陆有了第一次接触。皮塔号(Pinta)的瞭望手胡安·罗德里格斯·贝尔梅霍(Juan Rodriguez Berme jo)从桅杆上看到了现在的巴哈马群岛,高呼着:“有陆地!有陆地!”
哥伦布当时相信这个小岛就位于东亚海外,属于“Indies”(印度地方,包含今日印度、中南半岛及东印度群岛等地),所以他把当地人称为“Indians”(这正是美国原住民也被称为“印第安人”的原因)。一直到他过世,哥伦布都不认为自己犯了一个大错。不论是对他还是许多当代的人来说,说他发现了一个完全未知的大陆,这根本难以想象。毕竟千百年来,不管是那些伟大的思想家和学者甚至是不可能犯错的《圣经》,都只知道有欧洲、非洲和亚洲。怎么有可能他们全错了呢?难道《圣经》居然漏了大半个世界,只字未提?这种情况,就好像是说在1969年阿波罗11号要前往月球的途中,居然撞到了另一个从来没人看到的月亮。而正因为哥伦布不愿意接受自己的无知,我们可以说他仍然是个中世纪的人,深信着自己已经知道了全世界,所以就算已经有了如此重大的发现,也无法说服他。