自动驾驶Nvidia Jetson +FPGA设计方案
Nvidia NX平台使用FPGA设备采集mipi视频数据调试记录
Jetson NX与ZYNQ通过Pcie通信。


硬件原理图
基于ZYNQ+Jetson多目标识别方案设计
FPGA+Xavier高速信号处理系统
6U ZYNQ+Nvidia Jetson Xavier NX板
电子对抗平台,Xilinx ZYNQ接入CameraLink高帧率相机,采集图像,送给Jetson Xavier NX做目标识别锁定,可用于无人机/雷达系统/视觉控制器

大家都知道智能车(Intelligent vehicle)是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。自动驾驶的关键技术依次可以分为环境感知,行为决策,路径规划和运动控制四大部分。
自动驾驶理论听上去很简单,四大关键技术,但到底如何实现的呢?Google从2009年开始做自动驾驶,到现在已有8个年头。8个年头的技术积累还无法将自动驾驶技术量产落地,可见自动驾驶技术并不简单。自动驾驶是一个庞大而且复杂的工程,涉及的技术很多,而且太过细致。我从硬件和软件两方面谈一谈自动驾驶汽车所涉及的技术。
硬件
离开硬件谈自动驾驶都是耍流氓。先看个图,下图基本包含了自动驾驶研究所需要的各种硬件。

然而... 这么多传感器并不一定会同时出现在一辆车上。某种传感器存在与否,取决于这辆车需要完成什么样的任务。如果只需要完成高速公路的自动驾驶,类似Tesla 的AutoPilot 功能,那根本不需要使用到激光传感器;如果你需要完成城区路段的自动驾驶,没有激光传感器,仅靠视觉是很困难的。自动驾驶系统工程师要以任务为导向,进行硬件的选择和成本控制。有点类似于组装一台计算机,给我一份需求,我就给你出一份配置单。
1汽车
既然要做自动驾驶,汽车当然是必不可少的东西。从我司(上汽)做自动驾驶的经验来看,做开发时,能不选纯汽油车就别选。一方面是整个自动驾驶系统所消耗的电量巨大,混动和纯电动在这方面具有明显优势。另一方面是 发动机的底层控制算法相比于电机复杂太多,与其花大量时间在标定和调试底层上,不如直接选用电动车研究更高层的算法。
国内也有媒体专门就测试车辆的选择做过调研。“为什么谷歌、苹果不约而同的选择了雷克萨斯RX450h(混动汽车)?”“科技公司测试自己的自动驾驶技术时,对于测试车的选择又都有哪些讲究?”等问题。他们得出的结论是“电”和“空间”对无人车改装至关重要,其次从技术层面上对车的“熟悉程度”是另外一个因素,因为如果不和车企合作改装,需要“Hack(侵入)”某些控制系统。(此处源自极客汽车)
2.控制器
在前期算法预研阶段,推荐使用工控机(Industrial PC,IPC)作为最直接的控制器解决方案。因为工控机相比于嵌入式设备更稳定、可靠,社区支持及配套的软件也更丰富。百度开源的Apollo推荐了一款包含GPU的工控机,型号为 Nuvo-5095GC,如下图。

图片:Github ApolloAuto
当算法研究得较为成熟时,就可以将嵌入式系统作为控制器,比如Audi和TTTech共同研发的zFAS,目前已经应用在最新款Audi A8上量产车上了。

图片:极客汽车
3.CAN卡
工控机与汽车底盘的交互必须通过专门的语言——CAN。从底盘获取当前车速及方向盘转角等信 息,需要解析底盘发到CAN总线上的数据;工控机通过传感器的信息计算得到方向盘转角以及期望车速后,也要通过 CAN卡将消息转码成底盘可以识别的信号,底盘进而做出响应。CAN卡可以直接安装在工控机中,然后通过外部接口与CAN总线相连。Apollo使用的CAN卡,型号为 ESD CAN-PCIe/402,如下图。

4.全球定位系统(GPS)+惯性测量单元(IMU)
人类开车,从A点到B点,需要知道A点到B点的地图,以及自己当前所处的位置,这样才能知道行 驶到下一个路口是右转还是直行。
无人驾驶系统也一样,依靠GPS+IMU就可以知道自己在哪(经纬度),在朝哪个方向开(航向),当然IMU还能提供诸如横摆角速度、角加速度等更丰富的信息,这些信息有助于自动驾驶汽 车的定位和决策控制。
Apollo的GPS型号为NovAtel GPS-703-GGG-HV,IMU型号为NovAtel SPAN-IGM-A1。

5.感知传感器
相信大家对车载传感器都耳熟能详了。感知传感器分为很多种,包括视觉传感器、激光传感器、雷达传感器等。视觉传感器就是摄像头,摄像头分为单目视觉,双目(立体)视觉。比较知名的视觉传感器提供商有以色列的Mobileye,加拿大的PointGrey,德国的Pike等。
激光传感器分为单线,多线一直到64线。每多一线,成本上涨1万RMB,当然相应的检测效果也更好。比较知名的激光传感器提供商有美国的Velodyne和Quanergy,德国的Ibeo等。国内有速腾聚创和禾赛科技。
雷达传感器是车厂Tier1的强项,因为雷达传感器已经在汽车上得到了广泛使用。知名的供应商当然 是博世、德尔福、电装等。
6.硬件部分总结
组装一套可以完成某项功能的自动驾驶系统需要及其丰富的经验,并且要对各传感器的性能边界及控制器计算能力了如指掌。优秀的系统工程师能在满足功能的要求下将成本控制在最低,使其量产、落地的可能性更大。
软件
软件包含四层:感知、融合、决策、控制。
各个层级之间都需要编写代码,去实现信息的转化,更细化的分类如下。
实现一个智能驾驶系统,会有几个层级:
感知层 → 融合层 → 规划层 → 控制层
更具体一点为:
传感器层 → 驱动层 → 信息融合层 → 决策规划层 → 底层控制层
各个层级之间都需要编写代码,去实现信息的转化。
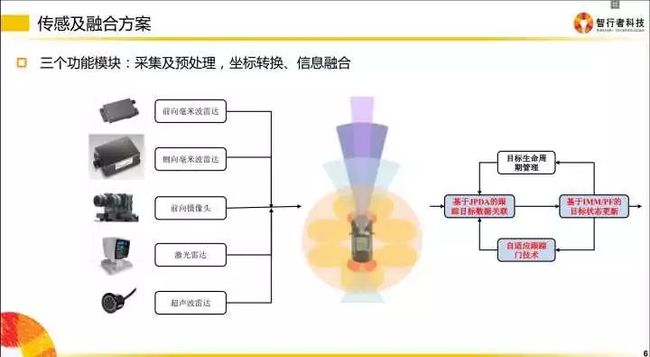
最基本的层级有以下几类:采集及预处理、坐标转换、信息融合
1.采集
传感器跟我们的PC或者嵌入式模块通信时,会有不同的传输方式。
比如我们采集来自摄像机的图像信息,有的是通过千兆网卡实现的通信,也有的是直接通过视频线 进行通信的。再比如某些毫米波雷达是通过CAN总线给下游发送信息的,因此我们必须编写解析 CAN信息的代码。
不同的传输介质,需要使用不同的协议去解析这些信息,这就是上文提到的“驱动层”。通俗地讲就是把传感器采集到的信息全部拿到,并且编码成团队可以使用的数据。
2.预处理
传感器的信息拿到后会发现不是所有信息都是有用的。
传感器层将数据以一帧一帧、固定频率发送给下游,但下游是无法拿每一帧的数据去进行决策或者 融合的。为什么?
因为传感器的状态不是100%有效的,如果仅根据某一帧的信号去判定前方是否有障碍物(有可能 是传感器误检了),对下游决策来说是极不负责任的。因此上游需要对信息做预处理,以保证车辆 前方的障碍物在时间维度上是一直存在的,而不是一闪而过。
这里就会使用到智能驾驶领域经常使用到的一个算法——卡尔曼滤波。
3.坐标转换
坐标转换在智能驾驶领域十分重要。
传感器是安装在不同地方的,比如毫米波(上图中紫色区域)是布置在车辆前方的;当车辆前方有一个障碍物,距离这个毫米波雷达有50米,那么我们就认为这个障碍物距离汽车有50米吗?
不是的!因为决策控制层做车辆运动规划时,是在车体坐标系下完成的(车体坐标系一般以后轴中心为O点),因此毫米波雷达检测到的50米,转换到自车坐标系下,还需要加上传感器到后轴的距离。
最终所有传感器的信息,都是需要转移到自车坐标系下的,这样所有传感器信息才能统一,供规划决策使用。
同理,摄像机一般安装在挡风玻璃下面,拿到的数据也是基于摄像机坐标系的,给下游的数据,同样需要转换到自车坐标系下。

自车坐标系:拿出你的右手,以大拇指 → 食指 → 中指 的顺序开始念 X、Y、Z。然后把手握成如下形状:

把三个轴的交点(食指根部)放在汽车后轴中心,Z轴指向车顶,X轴指向车辆前进方向。
各个团队可能定义的坐标系方向不一致,只要开发团队内部统一即可。
4.信息融合
信息融合是指把相同属性的信息进行多合一操作。
比如摄像机检测到了车辆正前方有一个障碍物,毫米波也检测到车辆前方有一个障碍物,激光雷达也检测到前方有一个障碍物,而实际上前方只有一个障碍物,所以我们要做的是把多传感器下这辆车的信息进行一次融合,以此告诉下游,前面有一辆车,而不是三辆车。

5.决策规划
这一层次主要设计的是拿到融合数据后,如何正确做规划。规划包含纵向控制和横向控制。纵向控制即速度控制,表现为 什么时候加速,什么时候制动。横向控制即行为控制,表现为 什么时候换道,什么时候超车等。