ORBSLAM中的卡方检验
ORB2单目读代码笔记13--卡方检验原理及其在ORB-SLAM2中的用处_不能再吃了OvO的博客-CSDN博客_orbslam 卡方检验
卡方检验详解分析与实例_bitcarmanlee的博客-CSDN博客_卡方检验例题与解析
cvlife
3.2 卡方检验
为什么要引用卡方检验?
以特定概率分布为某种情况建模时,事物长期结果较为稳定,能够清晰进行把握。比如抛硬币实验。
但是期望与事实存在差异怎么办?偏差是正常的小幅度波动?还是建模错误?此时,利用卡方分布 分析结果 ,排除 可疑结果 。
简单来说:当事实与期望不符合情况下使用卡方分布进行检验,看是否系统出了问题,还是属于正常波动
Version:0.9 StartHTML:0000000105 EndHTML:0000004169 StartFragment:0000000141 EndFragment:0000004129
卡方分布用途?
检查实际结果与期望结果之间何时存在显著差异。
1、检验拟合程度:也就是说可以检验一组给定数据与指定分布的吻合程度。如:用它检验抽奖机收益的观察频数与我们所期望的吻合程
度。
2、检验两个变量的独立性:通过这个方法检查变量之间是否存在某种关系。
卡方分布假设检验步骤?
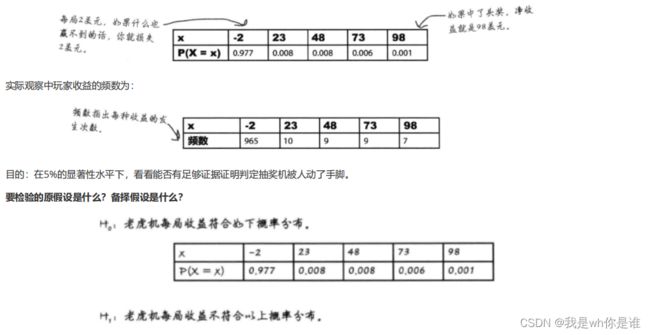
1、确定要进行检验的假设(H0)及其备择假设H1.
2、求出期望E.
3、确定用于做决策的拒绝域(右尾).
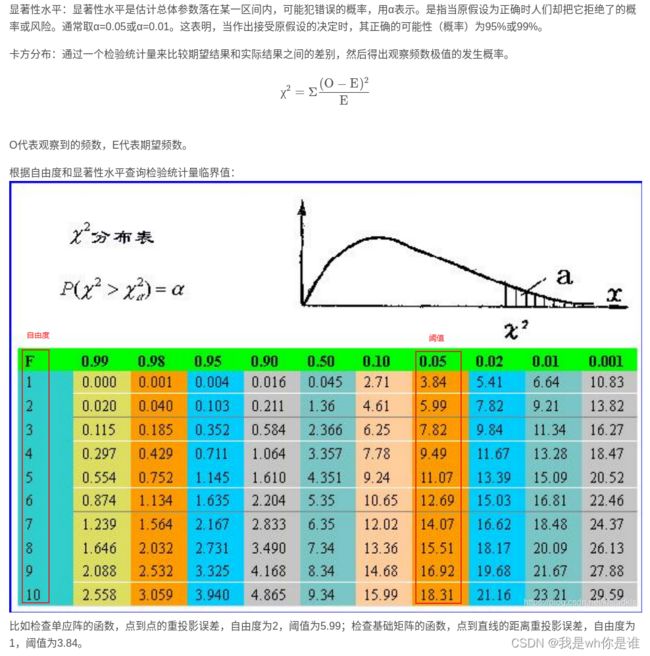
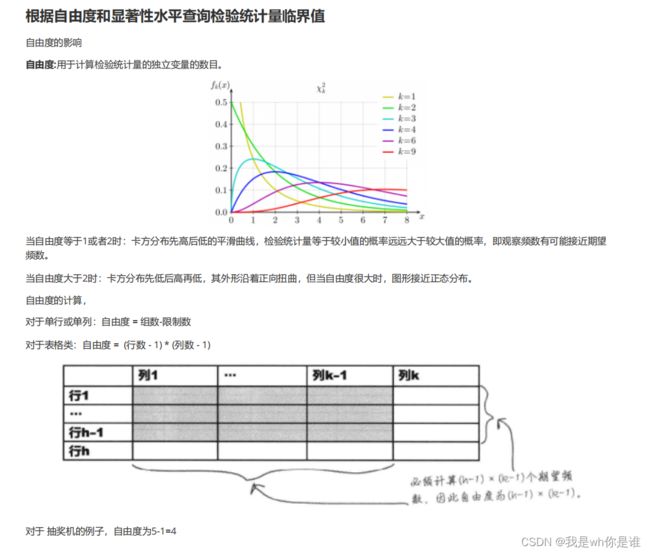
4、根据 自由度 和 显著性水平 查询检验统计量临界值.
5、查看检验统计量是否在拒绝域内.
6、做出决策.
一个例子:抽奖机之谜
抽奖机,肯定都不陌生,现在一些商场超市门口都有放置。正常情况下出奖概率是一定的,综合来看,商家收益肯定大于支出。
倘若突然某段时间内总是出奖,甚是反常,那么到底是某阶段是小概率事件还是有人进行操作了? 抽奖机怎么了? 针对这种现象或者类似这
种现象问题则可以借助卡方进行检验,暂且不着急如何检验,还是补充一下基础知识,再逐步深入解决问题。【常规事件中出现非常规现
象,如何检查问题所在的情况下使用卡方分布】
下面是某台抽奖机的期望分布,其中X代表每局游戏的净收益(每局独立事件):
什么是显著性水平?
显著性水平是估计总体参数落在某一区间内,可能犯错误的概率,用α表示。
显著性水平是 假设检验 中的一个概念,是指当原假设为正确时人们却把它拒绝了的概率或风险。它是公认的小概率事件的概率值,必须在每
一次统计检验之前确定,通常取 α=0.05或α=0.01 。这表明,当作出接受原假设的决定时,其 正确的可能性(概率)为95%或99% 。
卡方分布指出观察频数与期望频数之间差异显著性,和其他假设一样,这取决于显著性水平。
1、显性水平α进行检验,则写作:(常用的显著性水平1%和5%)
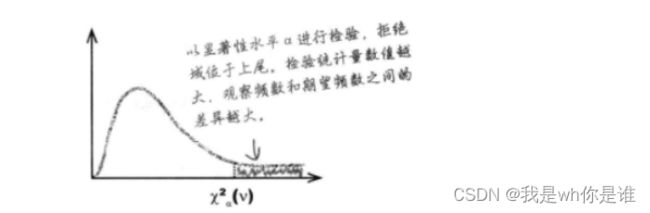
2、检测标准:卡方分布检验是单尾检验且是右尾,右尾被作为 拒绝域 。于是通过查看检验统计量是否位于右尾的拒绝域以内,来判定期望
分布得出结果的可能性。
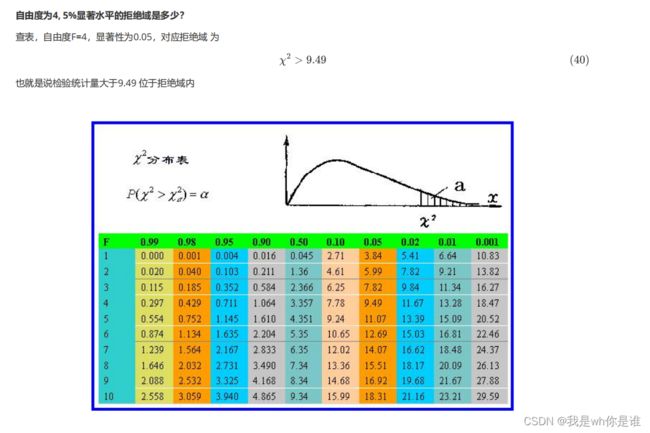
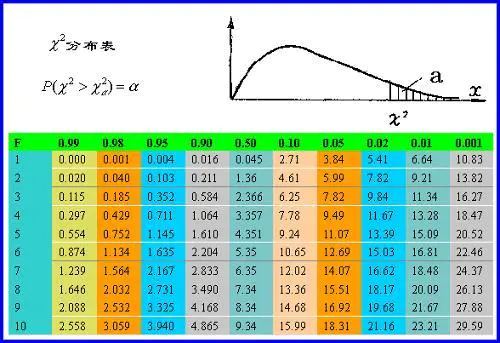
3、卡方概率表的使用:卡方临界值表是给定可以查询的
问题简述
抽奖机平常收益者总是商家,突然一段时间总是出奖。本来小概率事件频发,我们利用卡方的检验拟合优度看看能否有足够证据证明判定抽
奖机被人动了手脚 卡方分布是什么?
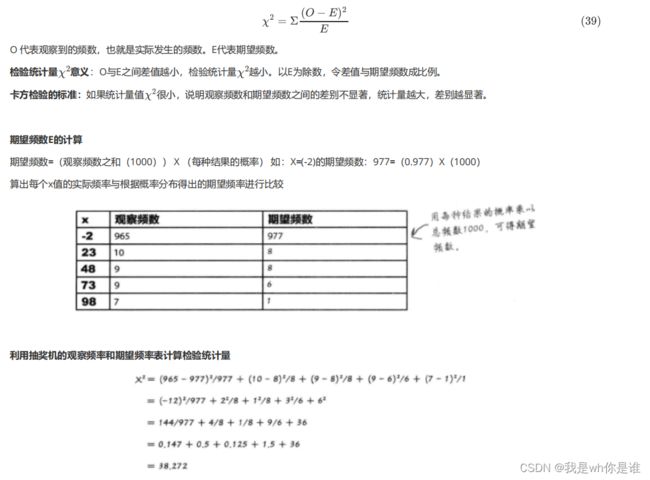
通过一个检验统计量来比较 期望结果 和 实际结果 之间的差别,然后得出观察频数极值的发生概率。
计算统计量步骤: (期望频数总和与观察频数总和相等)
1、表里填写相应的观察频数和期望频数
2、利用卡方公式计算检验统计量:
决策原则
如果位于拒绝域内我们拒绝原假设H0, 接受 H1。
如果不在拒绝域内我们 接受 原假设H0,拒绝H1
检验统计量38.272 > 9.49 位于拒绝域内
于是拒绝原假设:抽奖机每局收益如何概率分布,也就是说 抽奖机被人动了手脚
检验统计量拒绝域内外判定:
1、求出检验统计量a
2、通过自由度和显著性水平查到拒绝域临界值b
3、a>b则位于拒绝域内,反之,位于拒绝域外。
LocalMapping.cc
// Step 6.6:计算3D点在当前关键帧下的重投影误差
const float &sigmaSquare1 = mpCurrentKeyFrame->mvLevelSigma2[kp1.octave];
const float x1 = Rcw1.row(0).dot(x3Dt)+tcw1.at(0);
const float y1 = Rcw1.row(1).dot(x3Dt)+tcw1.at(1);
const float invz1 = 1.0/z1;
if(!bStereo1)
{
// 单目情况下
float u1 = fx1*x1*invz1+cx1;
float v1 = fy1*y1*invz1+cy1;
float errX1 = u1 - kp1.pt.x;
float errY1 = v1 - kp1.pt.y;
// 假设测量有一个像素的偏差,2自由度卡方检验阈值是5.991
if((errX1*errX1+errY1*errY1)>5.991*sigmaSquare1)
continue;
}
else
{
// 双目情况
float u1 = fx1*x1*invz1+cx1;
// 根据视差公式计算假想的右目坐标
float u1_r = u1 - mpCurrentKeyFrame->mbf*invz1;
float v1 = fy1*y1*invz1+cy1;
float errX1 = u1 - kp1.pt.x;
float errY1 = v1 - kp1.pt.y;
float errX1_r = u1_r - kp1_ur;
// 自由度为3,卡方检验阈值是7.8
if((errX1*errX1+errY1*errY1+errX1_r*errX1_r)>7.8*sigmaSquare1)
continue;
} B站5小时orbslam
卡方检验计算置信度得分: CheckFundamental()、CheckHomography()
卡方检验通过构造检验统计量
来比较期望结果和实际结果之间的差别,从而得出观察频数极值的发生概率.
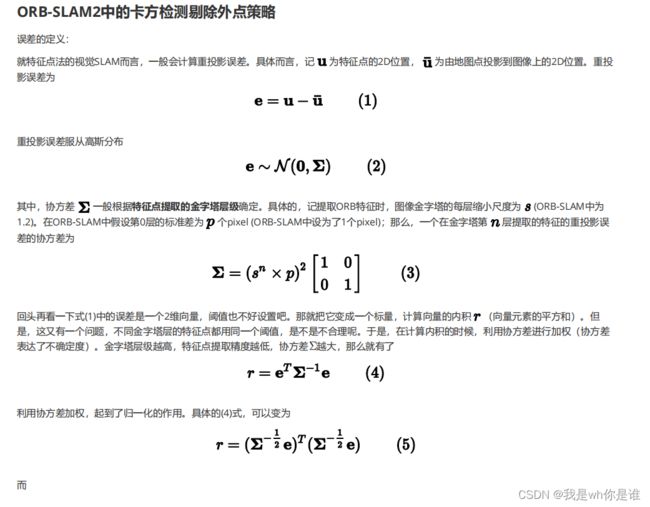
根据重投影误差构造统计量
,其值越大,观察结果和期望结果之间的差别越显著,某次计算越可能用到了外点.
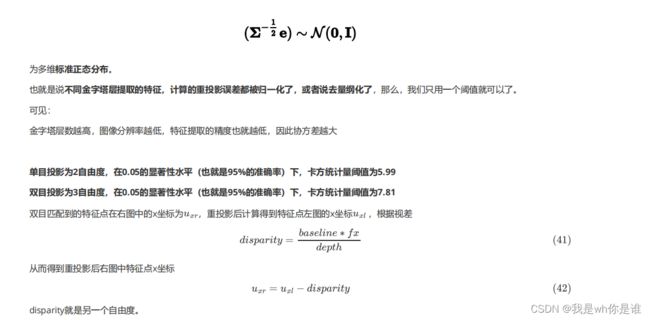
统计量置信度阈值与被检验变量自由度有关: 单目特征点重投影误差的自由度为2(u,v),双目特征点重投影误差自由度为3(u,v,ur).
取95%置信度下的卡方检验统计量阈值
- 若统计量大于该阈值,则认为计算矩阵使用到了外点,将其分数设为
0. - 若统计量小于该阈值,则将统计量裕量设为该解的置信度分数.
float Initializer::CheckHomography(const cv::Mat &H21, const cv::Mat &H12,vector &vbMatchesInliers, float sigma) {
const int N = mvMatches12.size();
// 取出单应矩阵H各位上的值
const float h11 = H21.at(0, 0);
const float h12 = H21.at(0, 1);
const float h13 = H21.at(0, 2);
const float h21 = H21.at(1, 0);
const float h22 = H21.at(1, 1);
const float h23 = H21.at(1, 2);
const float h31 = H21.at(2, 0);
const float h32 = H21.at(2, 1);
const float h33 = H21.at(2, 2);
const float h11inv = H12.at(0, 0);
const float h12inv = H12.at(0, 1);
const float h13inv = H12.at(0, 2);
const float h21inv = H12.at(1, 0);
const float h22inv = H12.at(1, 1);
const float h23inv = H12.at(1, 2);
const float h31inv = H12.at(2, 0);
const float h32inv = H12.at(2, 1);
const float h33inv = H12.at(2, 2);
vbMatchesInliers.resize(N); // 标记是否是内点
float score = 0; // 置信度得分
const float th = 5.991; // 自由度为2,显著性水平为0.05的卡方分布对应的临界阈值
const float invSigmaSquare = 1.0 / (sigma * sigma); // 信息矩阵,方差平方的倒数
// 双向投影,计算加权投影误差
for (int i = 0; i < N; i++) {
bool bIn = true;
// step1. 提取特征点对
const cv::KeyPoint &kp1 = mvKeys1[mvMatches12[i].first];
const cv::KeyPoint &kp2 = mvKeys2[mvMatches12[i].second];
const float u1 = kp1.pt.x;
const float v1 = kp1.pt.y;
const float u2 = kp2.pt.x;
const float v2 = kp2.pt.y;
// step2. 计算img2到img1的重投影误差
const float w2in1inv = 1.0 / (h31inv * u2 + h32inv * v2 + h33inv);
const float u2in1 = (h11inv * u2 + h12inv * v2 + h13inv) * w2in1inv;
const float v2in1 = (h21inv * u2 + h22inv * v2 + h23inv) * w2in1inv;
const float squareDist1 = (u1 - u2in1) * (u1 - u2in1) + (v1 - v2in1) * (v1 - v2in1);
const float chiSquare1 = squareDist1 * invSigmaSquare;
// step3. 离群点标记上,非离群点累加计算得分
if (chiSquare1 > th)
bIn = false;
else
score += th - chiSquare1;
// step4. 计算img1到img2的重投影误差
const float w1in2inv = 1.0 / (h31 * u1 + h32 * v1 + h33);
const float u1in2 = (h11 * u1 + h12 * v1 + h13) * w1in2inv;
const float v1in2 = (h21 * u1 + h22 * v1 + h23) * w1in2inv;
const float squareDist2 = (u2 - u1in2) * (u2 - u1in2) + (v2 - v1in2) * (v2 - v1in2);
const float chiSquare2 = squareDist2 * invSigmaSquare;
// step5. 离群点标记上,非离群点累加计算得分
if (chiSquare2 > th)
bIn = false;
else
score += th - chiSquare2;
if (bIn)
vbMatchesInliers[i] = true;
else
vbMatchesInliers[i] = false;
}
return score;
}