【无标题】(c++&opencv)基于高斯混合模型的多目标追踪方法练习
参考 https://blog.csdn.net/xiao__run/article/details/77478579 运动目标检测部分,简单手写了一下多目标追踪
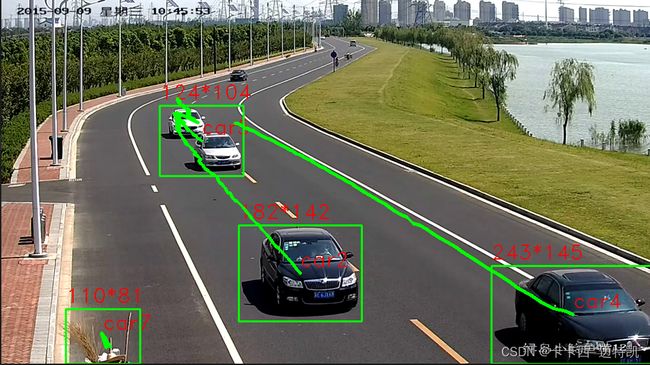
存在一些问题未解决:由于检测部分并不时刻准确,导致同一物体不同时刻id会变
ubuntu 下 opencv4(用3的话改一些cv里变量的名字即可)
效果一般但多少像点样子:
CmakeList.txt:
cmake_minimum_required( VERSION 2.8 )
project( track )
find_package( OpenCV REQUIRED )
include_directories(${OpenCV_INCLUDE_DIRS})
add_executable(test test.cpp)
target_link_libraries(test ${OpenCV_LIBS})
源代码test.cpp:
#include
center_points_cur_frame.push_back(center);
//rectangle(frame, boundRect[i].tl(), boundRect[i].br(), Scalar(0, 255, 0), 2, 8, 0);
}
}
//cout<<" cur_num1 " <
if( count == 1 ) {
imshow("Video", frame);
//waitKey(0);
cout<<"第一帧"<<endl;
continue;}
if( count ==2 ){
for(auto center_cur:center_points_cur_frame ){
int trac_index = 0;
double distance = 0;
double min_distance = 100000;
for(auto center_prev:center_points_prev_frame){
distance =ComputeDistance( center_cur , center_prev );
//cout<<"distance"<
min_distance = distance < min_distance ? distance : min_distance ;
//cout<<"min_distance"<
}
if( min_distance < therehold ){
tracking_object_center.push_back(center_cur);//不同id在当前帧对应的点
tractory.resize(tracking_object_center.size());
for(auto trac:tractory ){
trac.resize(100);
for( auto trac1:trac ){
trac1.resize(2);
}
}
tractory[track_id].push_back(center_cur);
track_id ++;
trac_index ++;
}
}
cout<<"第二帧"<<endl;
continue;
}
/* if( count <= 7 ) {
center_points_prev_frame.assign(center_points_cur_frame.begin(),center_points_cur_frame.end());//赋值
cout<<"size "<=8 ){
for(auto center_cur:center_points_cur_frame ){
double distance = 0;
double min_distance = 100000;
for(auto center_prev:center_points_prev_frame){
distance =ComputeDistance( center_cur , center_prev );
cout<<"distance"<
//开始第二帧后的匹配 当前帧中的点与上一帧的点进行匹配,匹配成功则继承id
cout<<" cnt "<<count<<" cur_num " <<center_points_cur_frame.size()<<endl;
for(int object_id = 0; object_id < tracking_object_center.size();object_id ++){
double distance = 0;
double min_distance = 100000;
vector<double> temp;
int temp_index = 0;
bool object_exist = false;
for( int i = 0; i < center_points_cur_frame.size(); i++ ){
if(tracking_object_center[object_id][0]==-1) continue;
distance = ComputeDistance(tracking_object_center[object_id] , center_points_cur_frame[i]);
if( distance < min_distance ){
min_distance = distance < min_distance ? distance : min_distance ;
temp = center_points_cur_frame[i];
temp_index = i;
}
}
//cout<<"distance "<
if( min_distance < therehold ){
object_exist = true;
/*Point p1= Point(tracking_object_center[object_id][0], tracking_object_center[object_id][1]);
Point p2= Point(temp[0],temp[1]);
line(frame,p1 , p2, Scalar(0, 255, 0), 1);*/
tracking_object_center[object_id] = temp;
tractory[object_id].push_back(temp);
Scalar color = CV_RGB(255, 0, 0);
Point pt= Point(temp[0], temp[1] - 10);
putText(frame, "car"+num2str(object_id), pt, cv::FONT_HERSHEY_DUPLEX, 1.0f, color);
center_points_cur_frame.erase(center_points_cur_frame.begin() + temp_index);
}
if( object_exist == false ){
//cout<<"non "<
tracking_object_center[object_id][0]=-1;
tracking_object_center[object_id][1]=-1;
tractory[object_id].clear();
//cout<<" yes "<
}
}
for( auto center_cur:center_points_cur_frame ){
tracking_object_center.push_back(center_cur);
tractory.resize(tracking_object_center.size());
tractory[track_id].push_back(center_cur);
Scalar color = CV_RGB(255, 0, 0);
Point pt= Point(center_cur[0], center_cur[1] - 10);
putText(frame, "car"+num2str(track_id), pt, cv::FONT_HERSHEY_DUPLEX, 1.0f, color);
track_id ++;
}
//cout<<" center_size "<< tracking_object_center.size()<<" "<
//加文本
/*for(size_t i=0; i < tracking_object_center.size();i++){
cout<< "huizhi"<
string text;
for (size_t i = 0; i < contours.size(); i++)
{
if (contourArea(contours[i]) > 3000)
{
rectangle(frame, boundRect[i].tl(), boundRect[i].br(), Scalar(0, 255, 0), 2, 8, 0);
Point pt = Point(boundRect[i].x, boundRect[i].y + boundRect[i].height + 15);
Point pt1 = Point(boundRect[i].x, boundRect[i].y - 10);
Point center = Point(boundRect[i].x + (boundRect[i].width / 2), boundRect[i].y + (boundRect[i].height / 2));
//cv::circle(frame, center, 8, Scalar(0, 0, 255), -1, 1, 0);
Scalar color = CV_RGB(255, 0, 0);
text = num2str(boundRect[i].width) + "*" + num2str(boundRect[i].height);
//putText(frame, "people", pt, cv::FONT_HERSHEY_DUPLEX, 1.0f, color);
putText(frame, text, pt1, cv::FONT_HERSHEY_DUPLEX, 1.0f, color);
}
}
//画轨迹
for( auto trac:tractory ){
// cout<<" trac "<
for(size_t i = 1; i < trac.size(); i++){
// cout<<" "<
Point p1 ,p2;
p1.x = trac[i][0];
p1.y = trac[i][1];
p2.x = trac[i-1][0];
p2.y = trac[i-1][1];
line(frame,p1,p2,Scalar(0, 255, 0),4);
}
}
imshow("Video", frame);
//waitKey(0);
}
return 0;
}