Machine Learning - Coursera 吴恩达机器学习教程 Week1 学习笔记
机器学习的定义
Arthur Samuel 传统定义
Arthur Samuel: “the field of study that gives computers the ability to learn without being explicitly programmed.” This is an older, informal definition.
让计算机无需明确编程,就有学习能力。
Tom Mitchell 现代定义
Tom Mitchell: “A computer program is said to learn from experience E with respect to some class of tasks T and performance measure P, if its performance at tasks in T, as measured by P, improves with experience E.”
若一个程序能从某任务T的经验E中学习后,提高任务T的性能P,就可以成之为机器学习。
比如下棋的例子:
E:下许多盘棋的经验
T:下棋
P:下一盘棋的胜率
通常,机器学习算法可分为两大类:有监督学习和无监督学习。
有监督学习(Supervised Learning)
有监督学习:提供了正确答案。
主要分为回归和分类。
回归(Regression)
需预测的目标变量连续时,比如房价和面积的关系,为线性回归问题;
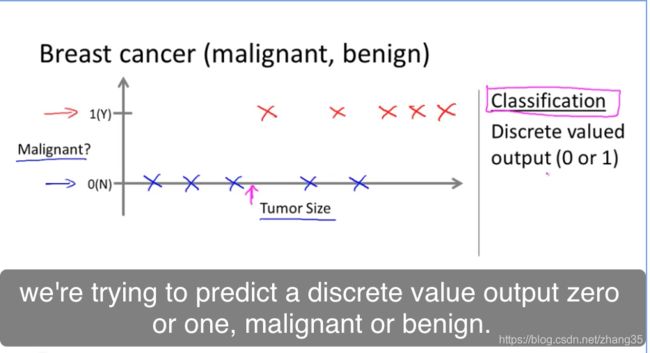
分类(Classification)
只有离散的几种取值时,比如肿瘤是否是良性,则为分类问题。
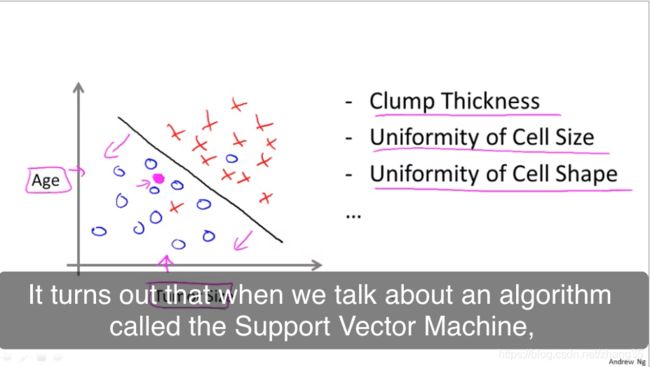
需要分类的属性太多,就需要用到支持向量机:
无监督学习(Unsupervised Learning)
无监督学习:不提供参考答案。只能从数据本身的关联中提取模式。
聚类: 给你1,000,000个不同的基因,通过不同的变量如寿命、位置、角色等,将它们自动分类。
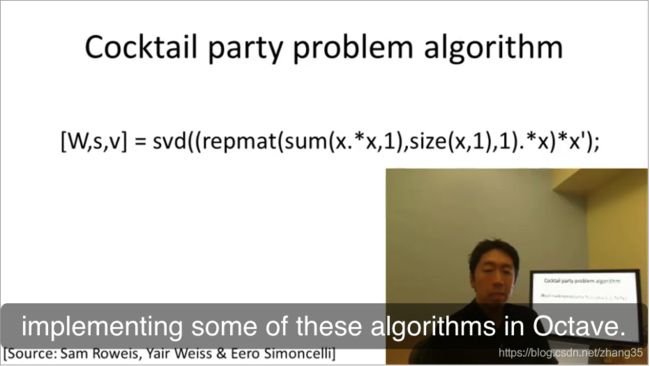
非聚类:鸡尾酒聚会算法,能在嘈杂环境中识别出背景音乐和不同个体的声音。

鸡尾酒聚会问题,一行代码解决:
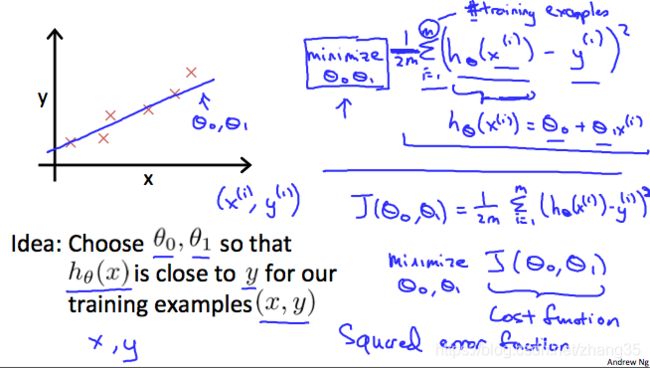
模型
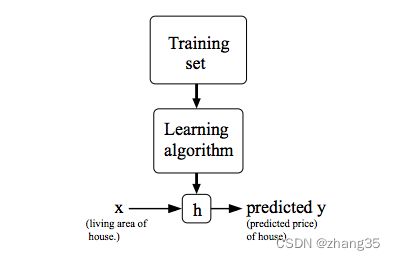
x(i) : 输入变量
y(i) : 目标变量
h(x) :hypothesis,假设的目标函数
代价函数
J(θ) 代表目标函数和原始函数见的差距,即代价函数。
使得J(θ)最小的那个h(x)就是预期的目标函数。
最常用的J(θ)表示如下,也叫做均方差函数:

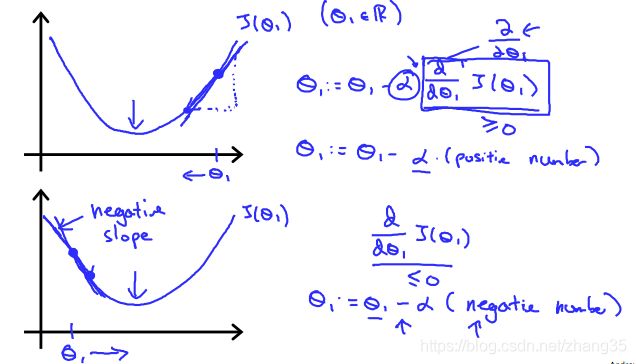
当J(θ0)只有一个变量时,J随θ的变化是二维图像:
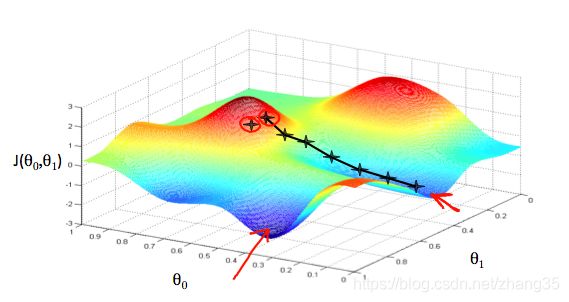
当J(θ0, θ1)有两个变量时,函数图是三维的:
可以用等高线来表示取得相同J值的θ0和θ1。
右图从等高线外围到中心,J的值越来越小,可以看到对应左侧的h(x)越来越靠谱:



梯度下降(gradient descent)
寻找最佳目标函数h(x)的过程,也即最小化代价函数J(θ)的过程。
目标就是找到让J(θ)最小的θ值。
寻找最小θ值,一般用梯度下降法。
这里需要认识一些术语:
derivative term 导数项
Partial Derivative 偏导数
multivariate 多元
convergent 收敛
calculus 微积分
tangent 切线;正切
convex function 凸函数(碗状的)
Quadratic function:二次函数
梯度下降法公式:重复以下式子,直到收敛。

求解过程如下图,每个星星是一步。
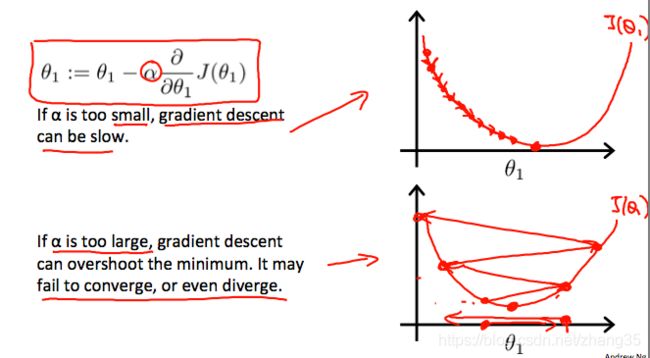
α:学习率,α越大,步子越大;
J的偏导数,从几何意义上讲,就是函数变化增加最快的地方。朝着下降最多的方向进行;
不同的起点,会带来不同的下降方向,如下图:
θ0, θ1的起始值其实无关紧要,一般均初始化为0。
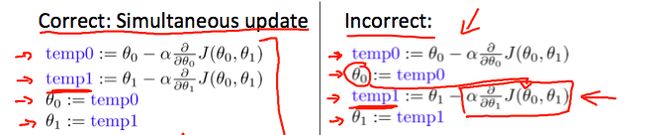
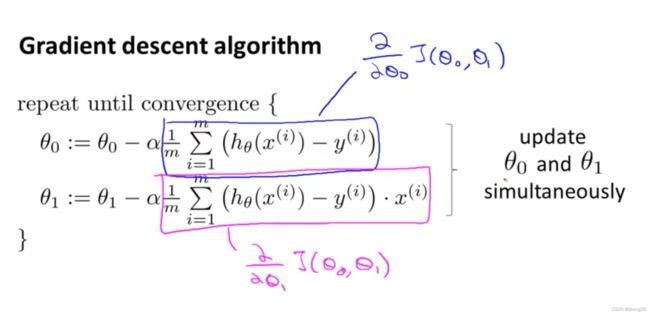
梯度下降,一定要同步更新多个变量,否则就会出错:
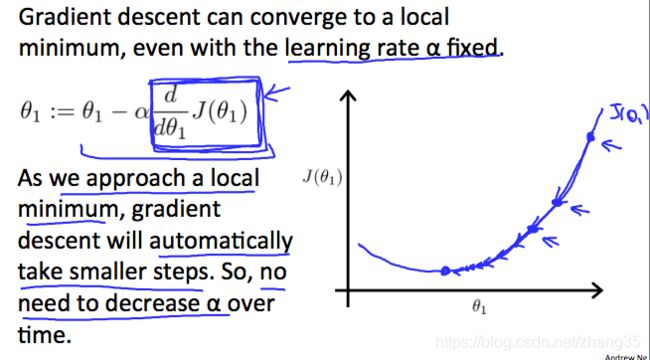
朝着梯度下降的方向逐渐收敛,在斜率为正的地方会减小,斜率为负的地方会增大,就是为了滑到谷底。
a过小时,收敛速度会过慢;
a过大时,步子迈得太大,甚至可能会发散。
固定的a也能自动减小step,因为导数在逐渐减小:
所以不用手动减小a。
例子:线性回归中的梯度下降
线性回归中,J是一个凸函数,所以总是能到达全局最优解:
偏导数如下:

此时梯度下降公式就变成了:
每步梯度下降,对应的图像化表示为:
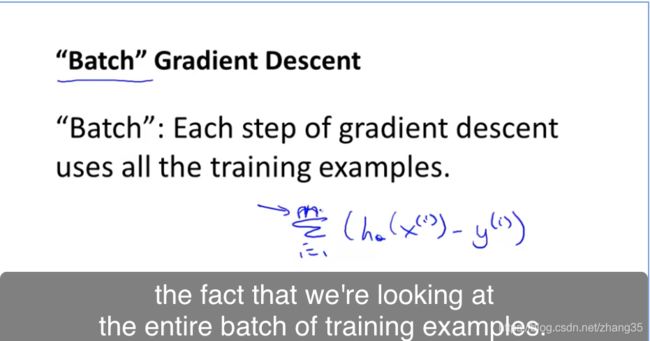
线性回归使用了批量梯度下降:即每步都使用所有的训练集。
其它梯度下降算法可能仅使用一个子集的训练数据。
至此学习了第一个机器学习算法,基于梯度下降法的线性回归问题——机器学习界的Hello World。
线性代数复习
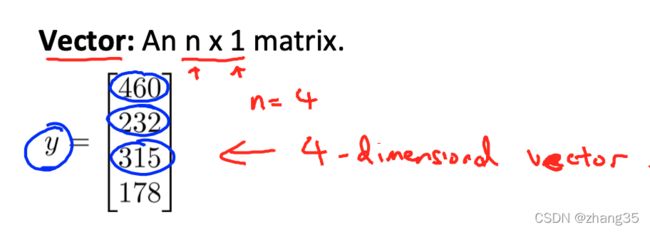
Vector : n * 1矩阵
R4 : 4维向量
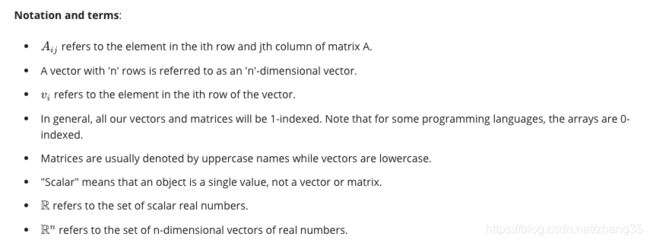
没有特殊说明时,该课程的下标i从1计数。
一些术语:
单位矩阵:identity matrix
singular matrix: 奇异矩阵
degenerate matrix: 退化矩阵
常用的Octave/Matlab代码
矩阵和向量
向量:一个n * 1的矩阵,相当于一列
% The ; denotes we are going back to a new row.
A = [1, 2, 3; 4, 5, 6; 7, 8, 9; 10, 11, 12]
% Initialize a vector
v = [1;2;3]
% Get the dimension of the matrix A where m = rows and n = columns
[m,n] = size(A)
% You could also store it this way
dim_A = size(A)
% Get the dimension of the vector v
dim_v = size(v)
% Now let's index into the 2nd row 3rd column of matrix A
A_23 = A(2,3)
输出:
A =
1 2 3
4 5 6
7 8 9
10 11 12
v =
1
2
3
m = 4
n = 3
dim_A =
4 3
dim_v =
3 1
A_23 = 6
加法和标量乘法
% Initialize matrix A and B
A = [1, 2, 4; 5, 3, 2]
B = [1, 3, 4; 1, 1, 1]
% Initialize constant s
s = 2
% See how element-wise addition works
add_AB = A + B
% See how element-wise subtraction works
sub_AB = A - B
% See how scalar multiplication works
mult_As = A * s
% Divide A by s
div_As = A / s
% What happens if we have a Matrix + scalar?
add_As = A + s
输出:
A =
1 2 4
5 3 2
B =
1 3 4
1 1 1
s = 2
add_AB =
2 5 8
6 4 3
sub_AB =
0 -1 0
4 2 1
mult_As =
2 4 8
10 6 4
div_As =
0.50000 1.00000 2.00000
2.50000 1.50000 1.00000
add_As =
3 4 6
7 5 4
矩阵乘以向量
% Initialize matrix A
A = [1, 2, 3; 4, 5, 6;7, 8, 9]
% Initialize vector v
v = [1; 1; 1]
% Multiply A * v
Av = A * v
输出:
A =
1 2 3
4 5 6
7 8 9
v =
1
1
1
Av =
6
15
24
矩阵乘以矩阵
% Initialize a 3 by 2 matrix
A = [1, 2; 3, 4;5, 6]
% Initialize a 2 by 1 matrix
B = [1; 2]
% We expect a resulting matrix of (3 by 2)*(2 by 1) = (3 by 1)
mult_AB = A*B
% Make sure you understand why we got that result
输出:
A =
1 2
3 4
5 6
B =
1
2
mult_AB =
5
11
17
乘法性质
- 不满足交换律:A∗B != B∗A
- 满足结合律:(A∗B)∗C = A∗(B∗C)
- 单位矩阵( identity matrix):A * I = I * A = A
% Initialize random matrices A and B
A = [1,2;4,5]
B = [1,1;0,2]
% Initialize a 2 by 2 identity matrix
I = eye(2)
% The above notation is the same as I = [1,0;0,1]
% What happens when we multiply I*A ?
IA = I*A
% How about A*I ?
AI = A*I
% Compute A*B
AB = A*B
% Is it equal to B*A?
BA = B*A
% Note that IA = AI but AB != BA
输出:
A =
1 2
4 5
B =
1 1
0 2
I =
Diagonal Matrix
1 0
0 1
IA =
1 2
4 5
AI =
1 2
4 5
AB =
1 5
4 14
BA =
5 7
8 10
逆矩阵和转置矩阵
矩阵和逆矩阵相乘,得到单位矩阵:
A * A-1 = I
转置矩阵是顺时针旋转90°,然后在水平翻转一下。
% Initialize matrix A
A = [1,2,0;0,5,6;7,0,9]
% Transpose A
A_trans = A'
% Take the inverse of A
A_inv = inv(A)
% What is A^(-1)*A?
A_invA = inv(A)*A
输出:
A =
1 2 0
0 5 6
7 0 9
A_trans =
1 0 7
2 5 0
0 6 9
A_inv =
0.348837 -0.139535 0.093023
0.325581 0.069767 -0.046512
-0.271318 0.108527 0.038760
A_invA =
1.00000 -0.00000 0.00000
0.00000 1.00000 -0.00000
-0.00000 0.00000 1.00000