小青龙的Java面试笔记
计算机网络
一、谈下你对五层网络协议体系结构的理解?

1)应用层
应用层(application-layer)的任务是通过应用进程间的交互来完成特定网络应用。应用层协议定义的是应用进程(进程:主机中正在运行的程序)间的通信和交互的规则。对于不同的网络应用需要不同的应用层协议。在互联网中应用层协议很多,如域名系统 DNS,支持万维网应用的 HTTP 协议,支持电子邮件的 SMTP 协议等等。我们把应用层交互的数据单元称为报文。
2)运输层
运输层(transport layer)的主要任务就是负责向两台主机进程之间的通信提供通用的数据传输服务。应用进程利用该服务传送应用层报文。“通用的”是指并不针对某一个特定的网络应用,而是多种应用可以使用同一个运输层服务。
由于一台主机可同时运行多个线程,因此运输层有复用和分用的功能。所谓复用就是指多个应用层进程可同时使用下面运输层的服务,分用和复用相反,是运输层把收到的信息分别交付上面应用层中的相应进程。
3)网络层
在计算机网络中进行通信的两个计算机之间可能会经过很多个数据链路,也可能还要经过很多通信子网。网络层的任务就是选择合适的网间路由和交换结点, 确保数据及时传送。在发送数据时,网络层把运输层产生的报文段或用户数据报封装成分组和包进行传送。在 TCP / IP 体系结构中,由于网络层使用 IP 协议,因此分组也叫 IP 数据报,简称数据报。
4)数据链路层
数据链路层(data link layer)通常简称为链路层。两台主机之间的数据传输,总是在一段一段的链路上传送的,这就需要使用专门的链路层的协议。在两个相邻节点之间传送数据时,数据链路层将网络层交下来的 IP 数据报组装成帧,在两个相邻节点间的链路上传送帧。每一帧包括数据和必要的控制信息(如:同步信息,地址信息,差错控制等)。
在接收数据时,控制信息使接收端能够知道一个帧从哪个比特开始和到哪个比特结束。这样,数据链路层在收到一个帧后,就可从中提出数据部分,上交给网络层。控制信息还使接收端能够检测到所收到的帧中有无差错。如果发现差错,数据链路层就简单地丢弃这个出了差错的帧,以避免继续在网络中传送下去白白浪费网络资源。如果需要改正数据在链路层传输时出现差错(这就是说,数据链路层不仅要检错,而且还要纠错),那么就要采用可靠性传输协议来纠正出现的差错。这种方法会使链路层的协议复杂些。
5)物理层
在物理层上所传送的数据单位是比特。物理层(physical layer)的作用是实现相邻计算机节点之间比特流的透明传送,尽可能屏蔽掉具体传输介质和物理设备的差异。使其上面的数据链路层不必考虑网络的具体传输介质是什么。“透明传送比特流”表示经实际电路传送后的比特流没有发生变化,对传送的比特流来说,这个电路好像是看不见的。
二、简单说下每一层对应的网络协议有哪些?

TCP和UDP
TCP 的主要特点是什么?
-
TCP 是面向连接的。(就好像打电话一样,通话前需要先拨号建立连接,通话结束后要挂机释放连接);
-
每一条 TCP 连接只能有两个端点,每一条 TCP 连接只能是点对点的(一对一);
-
TCP 提供可靠交付的服务。通过 TCP 连接传送的数据,无差错、不丢失、不重复、并且按序到达;
-
TCP 提供全双工通信。TCP 允许通信双方的应用进程在任何时候都能发送数据。TCP 连接的两端都设有发送缓存和接收缓存,用来临时存放双方通信的数据;
-
面向字节流。TCP 中的“流”(Stream)指的是流入进程或从进程流出的字节序列。“面向字节流”的含义是:虽然应用程序和 TCP 的交互是一次一个数据块(大小不等),但 TCP 把应用程序交下来的数据仅仅看成是一连串的无结构的字节流。
UDP 的主要特点是什么?
-
UDP 是无连接的;
-
UDP 使用尽最大努力交付,即不保证可靠交付,因此主机不需要维持复杂的链接状态(这里面有许多参数);
-
UDP 是面向报文的;
-
UDP 没有拥塞控制,因此网络出现拥塞不会使源主机的发送速率降低(对实时应用很有用,如 直播,实时视频会议等);
-
UDP 支持一对一、一对多、多对一和多对多的交互通信;
-
UDP 的首部开销小,只有 8 个字节,比 TCP 的 20 个字节的首部要短。

三、TCP三次握手
三次握手流程

最初客户端和服务端都处于 CLOSED(关闭) 状态。本例中 A(Client) 主动打开连接,B(Server) 被动打开连接。
一开始,B 的 TCP 服务器进程首先创建传输控制块TCB,准备接受客户端进程的连接请求。然后服务端进程就处于 LISTEN(监听) 状态,等待客户端的连接请求。如有,立即作出响应。
第一次握手:A 的 TCP 客户端进程也是首先创建传输控制块 TCB。然后,在打算建立 TCP 连接时,向 B 发出连接请求报文段,这时首部中的同步位 SYN=1,同时选择一个初始序号 seq = x。TCP 规定,SYN 报文段(即 SYN = 1 的报文段)不能携带数据,但要消耗掉一个序号。这时,TCP 客户进程进入 SYN-SENT(同步已发送)状态。
第二次握手:B 收到连接请求报文后,如果同意建立连接,则向 A 发送确认。在确认报文段中应把 SYN 位和 ACK 位都置 1,确认号是 ack = x + 1,同时也为自己选择一个初始序号 seq = y。请注意,这个报文段也不能携带数据,但同样要消耗掉一个序号。这时 TCP 服务端进程进入 SYN-RCVD(同步收到)状态。
第三次握手:TCP 客户进程收到 B 的确认后,还要向 B 给出确认。确认报文段的 ACK 置 1,确认号 ack = y + 1,而自己的序号 seq = x + 1。这时 ACK 报文段可以携带数据。但如果不携带数据则不消耗序号,这种情况下,下一个数据报文段的序号仍是 seq = x + 1。这时,TCP 连接已经建立,A 进入 ESTABLISHED(已建立连接)状态。
为什么两次握手不可以呢?
为了防止已经失效的连接请求报文段突然又传送到了 B,因而产生错误。比如下面这种情况:A 发出的第一个连接请求报文段并没有丢失,而是在网路结点长时间滞留了,以致于延误到连接释放以后的某个时间段才到达 B。本来这是一个早已失效的报文段。但是 B 收到此失效的链接请求报文段后,就误认为 A 又发出一次新的连接请求。于是就向 A 发出确认报文段,同意建立连接。
对于上面这种情况,如果不进行第三次握手,B 发出确认后就认为新的运输连接已经建立了,并一直等待 A 发来数据。B 的许多资源就这样白白浪费了。
如果采用了三次握手,由于 A 实际上并没有发出建立连接请求,所以不会理睬 B 的确认,也不会向 B 发送数据。B 由于收不到确认,就知道 A 并没有要求建立连接。
为什么不需要四次握手?
有人可能会说 A 发出第三次握手的信息后在没有接收到 B 的请求就已经进入了连接状态,那如果 A 的这个确认包丢失或者滞留了怎么办?
我们需要明白一点,完全可靠的通信协议是不存在的。在经过三次握手之后,客户端和服务端已经可以确认之前的通信状况,都收到了确认信息。所以即便再增加握手次数也不能保证后面的通信完全可靠,所以是没有必要的。
TCP 协议是如何保证可靠传输的?
- 数据包校验:目的是检测数据在传输过程中的任何变化,若校验出包有错,则丢弃报文段并且不给出响应,这时 TCP 发送数据端超时后会重发数据;
- 对失序数据包重排序:既然 TCP 报文段作为 IP 数据报来传输,而 IP 数据报的到达可能会失序,因此 TCP 报文段的到达也可能会失序。TCP 将对失序数据进行重新排序,然后才交给应用层;
- 丢弃重复数据:对于重复数据,能够丢弃重复数据;
- 应答机制:当 TCP 收到发自 TCP 连接另一端的数据,它将发送一个确认。这个确认不是立即发送,通常将推迟几分之一秒;
- 超时重发:当 TCP 发出一个段后,它启动一个定时器,等待目的端确认收到这个报文段。如果不能及时收到一个确认,将重发这个报文段;
- 流量控制:TCP 连接的每一方都有固定大小的缓冲空间。TCP 的接收端只允许另一端发送接收端缓冲区所能接纳的数据,这可以防止较快主机致使较慢主机的缓冲区溢出,这就是流量控制。TCP 使用的流量控制协议是可变大小的滑动窗口协议。
四、TCP四次挥手
四次挥手流程
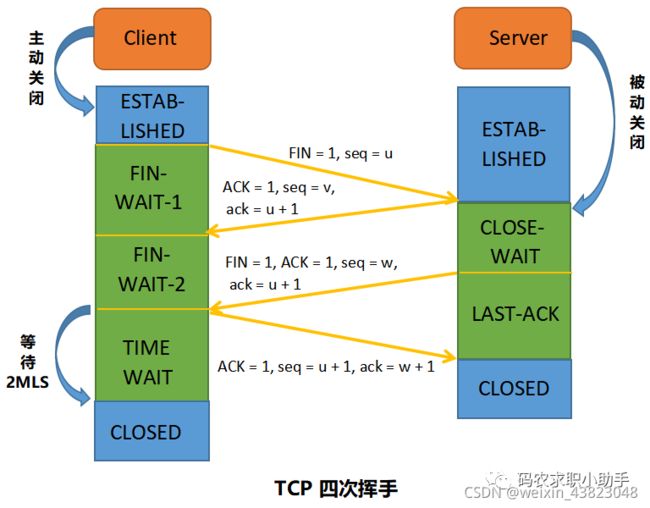
第一次挥手:A 的应用进程先向其 TCP 发出连接释放报文段,并停止再发送数据,主动关闭 TCP 连接。A 把连接释放报文段首部的终止控制位 FIN 置 1,其序号 seq = u(等于前面已传送过的数据的最后一个字节的序号加 1),这时 A 进入 FIN-WAIT-1(终止等待1)状态,等待 B 的确认。请注意:TCP 规定,FIN 报文段即使不携带数据,也将消耗掉一个序号。
第二次挥手:B 收到连接释放报文段后立即发出确认,确认号是 ack = u + 1,而这个报文段自己的序号是 v(等于 B 前面已经传送过的数据的最后一个字节的序号加1),然后 B 就进入 CLOSE-WAIT(关闭等待)状态。TCP 服务端进程这时应通知高层应用进程,因而从 A 到 B 这个方向的连接就释放了,这时的 TCP 连接处于半关闭(half-close)状态,即 A 已经没有数据要发送了,但 B 若发送数据,A 仍要接收。也就是说,从 B 到 A 这个方向的连接并未关闭,这个状态可能会持续一段时间。A 收到来自 B 的确认后,就进入 FIN-WAIT-2(终止等待2)状态,等待 B 发出的连接释放报文段。
第三次挥手:若 B 已经没有要向 A 发送的数据,其应用进程就通知 TCP 释放连接。这时 B 发出的连接释放报文段必须使 FIN = 1。假定 B 的序号为 w(在半关闭状态,B 可能又发送了一些数据)。B 还必须重复上次已发送过的确认号 ack = u + 1。这时 B 就进入 LAST-ACK(最后确认)状态,等待 A 的确认。
第四次挥手:A 在收到 B 的连接释放报文后,必须对此发出确认。在确认报文段中把 ACK 置 1,确认号 ack = w + 1,而自己的序号 seq = u + 1(前面发送的 FIN 报文段要消耗一个序号)。然后进入 TIME-WAIT(时间等待) 状态。请注意,现在 TCP 连接还没有释放掉。必须经过时间等待计时器设置的时间 2MSL(MSL:最长报文段寿命)后,A 才能进入到 CLOSED 状态,然后撤销传输控制块,结束这次 TCP 连接。当然如果 B 一收到 A 的确认就进入 CLOSED 状态,然后撤销传输控制块。所以在释放连接时,B 结束 TCP 连接的时间要早于 A。
五、谈谈你对滑动窗口的了解?
TCP 利用滑动窗口实现流量控制的机制。滑动窗口(Sliding window)是一种流量控制技术。早期的网络通信中,通信双方不会考虑网络的拥挤情况直接发送数据。由于大家不知道网络拥塞状况,同时发送数据,导致中间节点阻塞掉包,谁也发不了数据,所以就有了滑动窗口机制来解决此问题。
TCP 中采用滑动窗口来进行传输控制,滑动窗口的大小意味着接收方还有多大的缓冲区可以用于接收数据。发送方可以通过滑动窗口的大小来确定应该发送多少字节的数据。当滑动窗口为 0 时,发送方一般不能再发送数据报,但有两种情况除外,一种情况是可以发送紧急数据,例如,允许用户终止在远端机上的运行进程。另一种情况是发送方可以发送一个 1 字节的数据报来通知接收方重新声明它希望接收的下一字节及发送方的滑动窗口大小。
六、谈下你对 TCP 拥塞控制的理解?使用了哪些算法?
TCP 的拥塞控制采用了四种算法,即:慢开始、拥塞避免、快重传和快恢复。
慢开始:
慢开始算法的思路是当主机开始发送数据时,如果立即把大量数据字节注入到网络,那么可能会引起网络阻塞,因为现在还不知道网络的符合情况。经验表明,较好的方法是先探测一下,即由小到大逐渐增大发送窗口,也就是由小到大逐渐增大拥塞窗口数值。cwnd 初始值为 1,每经过一个传播轮次,cwnd 加倍。
拥塞避免:
拥塞避免算法的思路是让拥塞窗口 cwnd 缓慢增大,即每经过一个往返时间 RTT 就把发送方的 cwnd 加 1。
快重传与快恢复:
在 TCP/IP 中,快速重传和快恢复(fast retransmit and recovery,FRR)是一种拥塞控制算法,它能快速恢复丢失的数据包。
没有 FRR,如果数据包丢失了,TCP 将会使用定时器来要求传输暂停。在暂停的这段时间内,没有新的或复制的数据包被发送。有了 FRR,如果接收机接收到一个不按顺序的数据段,它会立即给发送机发送一个重复确认。如果发送机接收到三个重复确认,它会假定确认件指出的数据段丢失了,并立即重传这些丢失的数据段。
有了 FRR,就不会因为重传时要求的暂停被耽误。当有单独的数据包丢失时,快速重传和快恢复(FRR)能最有效地工作。当有多个数据信息包在某一段很短的时间内丢失时,它则不能很有效地工作。
七、你对 HTTP 状态码有了解吗?

1XX 信息
100 Continue :表明到目前为止都很正常,客户端可以继续发送请求或者忽略这个响应。
2XX 成功
200 OK
204 No Content :请求已经成功处理,但是返回的响应报文不包含实体的主体部分。一般在只需要从客户端往服务器发送信息,而不需要返回数据时使用。
206 Partial Content :表示客户端进行了范围请求,响应报文包含由 Content-Range 指定范围的实体内容。
3XX 重定向
301 Moved Permanently :永久性重定向;
302 Found :临时性重定向;
303 See Other :和 302 有着相同的功能,但是 303 明确要求客户端应该采用 GET 方法获取资源。
304 Not Modified :如果请求报文首部包含一些条件,例如:If-Match,If-Modified-Since,If-None-Match,If-Range,If-Unmodified-Since,如果不满足条件,则服务器会返回 304 状态码。
307 Temporary Redirect :临时重定向,与 302 的含义类似,但是 307 要求浏览器不会把重定向请求的 POST 方法改成 GET 方法。
4XX 客户端错误
400 Bad Request :请求报文中存在语法错误。
401 Unauthorized :该状态码表示发送的请求需要有认证信息(BASIC 认证、DIGEST 认证)。如果之前已进行过一次请求,则表示用户认证失败。
403 Forbidden :请求被拒绝。
404 Not Found
5XX 服务器错误
500 Internal Server Error :服务器正在执行请求时发生错误;
503 Service Unavailable :服务器暂时处于超负载或正在进行停机维护,现在无法处理请求。
八、HTTP 和 HTTPS 的区别?
1)开销:HTTPS 协议需要到 CA 申请证书,一般免费证书很少,需要交费;
2)资源消耗:HTTP 是超文本传输协议,信息是明文传输,HTTPS 则是具有安全性的 ssl 加密传输协议,需要消耗更多的 CPU 和内存资源;
3)端口不同:HTTP 和 HTTPS 使用的是完全不同的连接方式,用的端口也不一样,前者是 80,后者是 443;
4)安全性:HTTP 的连接很简单,是无状态的;HTTPS 协议是由 TSL+HTTP 协议构建的可进行加密传输、身份认证的网络协议,比 HTTP 协议安全。
九、什么是无状态协议,HTTP 是无状态协议吗,怎么解决
无状态协议(Stateless Protocol) 就是指浏览器对于事务的处理没有记忆能力。举个例子来说就是比如客户请求获得网页之后关闭浏览器,然后再次启动浏览器,登录该网站,但是服务器并不知道客户关闭了一次浏览器。
HTTP 就是一种无状态的协议,他对用户的操作没有记忆能力。可能大多数用户不相信,他可能觉得每次输入用户名和密码登陆一个网站后,下次登陆就不再重新输入用户名和密码了。这其实不是 HTTP 做的事情,起作用的是一个叫做 小甜饼(Cookie) 的机制。它能够让浏览器具有记忆能力。
SSL加密算法
- ClientHello
首先,由客户端向服务器发起加密通信请求,也就是 ClientHello 请求。
在这一步,客户端主要向服务器发送以下信息:
(1)客户端支持的 SSL/TLS 协议版本,如 TLS 1.2 版本。
(2)客户端生产的随机数(Client Random),后面用于生产「会话秘钥」。
(3)客户端支持的密码套件列表,如 RSA 加密算法。
- SeverHello
服务器收到客户端请求后,向客户端发出响应,也就是 SeverHello。服务器回应的内容有如下内容:
(1)确认 SSL/ TLS 协议版本,如果浏览器不支持,则关闭加密通信。
(2)服务器生产的随机数(Server Random),后面用于生产「会话秘钥」。
(3)确认的密码套件列表,如 RSA 加密算法。
(4)服务器的数字证书。
3.客户端回应
客户端收到服务器的回应之后,首先通过浏览器或者操作系统中的 CA 公钥,确认服务器的数字证书的真实性。
如果证书没有问题,客户端会从数字证书中取出服务器的公钥,然后使用它加密报文,向服务器发送如下信息:
(1)一个随机数(pre-master key)。该随机数会被服务器公钥加密。
(2)加密通信算法改变通知,表示随后的信息都将用「会话秘钥」加密通信。
(3)客户端握手结束通知,表示客户端的握手阶段已经结束。这一项同时把之前所有内容的发生的数据做个摘要,用来供服务端校验。
上面第一项的随机数是整个握手阶段的第三个随机数,这样服务器和客户端就同时有三个随机数,接着就用双方协商的加密算法,各自生成本次通信的「会话秘钥」。
- 服务器的最后回应
服务器收到客户端的第三个随机数(pre-master key)之后,通过协商的加密算法,计算出本次通信的「会话秘钥」。然后,向客户端发生最后的信息:
(1)加密通信算法改变通知,表示随后的信息都将用「会话秘钥」加密通信。
(2)服务器握手结束通知,表示服务器的握手阶段已经结束。这一项同时把之前所有内容的发生的数据做个摘要,用来供客户端校验。
至此,整个 SSL/TLS 的握手阶段全部结束。接下来,客户端与服务器进入加密通信,就完全是使用普通的 HTTP 协议,只不过用「会话秘钥」加密内容。
十、说下 GET 和 POST 的区别?
GET 和 POST 本质都是 HTTP 请求,只不过对它们的作用做了界定和适配,并且让他们适应各自的场景。
本质区别:GET 只是一次 HTTP请求,POST 先发请求头再发请求体,实际上是两次请求。
1)从功能上讲,GET 一般用来从服务器上获取资源,POST 一般用来更新服务器上的资源;
2)从 REST 服务角度上说,GET 是幂等的,即读取同一个资源,总是得到相同的数据,而 POST 不是幂等的,因为每次请求对资源的改变并不是相同的;进一步地,GET 不会改变服务器上的资源,而 POST 会对服务器资源进行改变;
3)从请求参数形式上看,GET 请求的数据会附在 URL 之后,即将请求数据放置在 HTTP 报文的 请求头 中,以 ? 分割 URL 和传输数据,参数之间以 & 相连。特别地,如果数据是英文字母/数字,原样发送;否则,会将其编码为 application/x-www-form-urlencoded MIME 字符串(如果是空格,转换为+,如果是中文/其他字符,则直接把字符串用 BASE64 加密,得出如:%E4%BD%A0%E5%A5%BD,其中 %XX 中的 XX 为该符号以 16 进制表示的 ASCII);而 POST 请求会把提交的数据则放置在是 HTTP 请求报文的 请求体 中;
4)就安全性而言,POST 的安全性要比 GET 的安全性高,因为 GET 请求提交的数据将明文出现在 URL 上,而且 POST 请求参数则被包装到请求体中,相对更安全;
5)从请求的大小看,GET 请求的长度受限于浏览器或服务器对 URL 长度的限制,允许发送的数据量比较小,而 POST 请求则是没有大小限制的。
十一、在浏览器中输入 URL 地址到显示主页的过程?
1)DNS 解析:浏览器查询 DNS,获取域名对应的 IP 地址:具体过程包括浏览器搜索自身的 DNS 缓存、搜索操作系统的 DNS 缓存、读取本地的 Host 文件和向本地 DNS 服务器进行查询等。对于向本地 DNS 服务器进行查询,如果要查询的域名包含在本地配置区域资源中,则返回解析结果给客户机,完成域名解析(此解析具有权威性);如果要查询的域名不由本地 DNS 服务器区域解析,但该服务器已缓存了此网址映射关系,则调用这个 IP 地址映射,完成域名解析(此解析不具有权威性)。如果本地域名服务器并未缓存该网址映射关系,那么将根据其设置发起递归查询或者迭代查询;
2)TCP 连接:浏览器获得域名对应的 IP 地址以后,浏览器向服务器请求建立链接,发起三次握手;
3)发送 HTTP 请求:TCP 连接建立起来后,浏览器向服务器发送 HTTP 请求;
4)服务器处理请求并返回 HTTP 报文:服务器接收到这个请求,并根据路径参数映射到特定的请求处理器进行处理,并将处理结果及相应的视图返回给浏览器;
5)浏览器解析渲染页面:浏览器解析并渲染视图,若遇到对 js 文件、css 文件及图片等静态资源的引用,则重复上述步骤并向服务器请求这些资源;浏览器根据其请求到的资源、数据渲染页面,最终向用户呈现一个完整的页面。
6)连接结束。
十二、TCP的粘包和拆包
粘包、拆包发生原因
发生TCP粘包或拆包有很多原因,现列出常见的几点,
- 要发送的数据大于TCP发送缓冲区剩余空间大小,将会发生拆包。
- 待发送数据大于MSS(最大报文长度),TCP在传输前将进行拆包。
- 要发送的数据小于TCP发送缓冲区的大小,TCP将多次写入缓冲区的数据一次发送出去,将会发生粘包。
- 接收数据端的应用层没有及时读取接收缓冲区中的数据,将发生粘包。
粘包、拆包解决办法
- 发送端给每个数据包添加包首部,首部中应该至少包含数据包的长度,这样接收端在接收到数据后,通过读取包首部的长度字段,便知道每一个数据包的实际长度了。
- 发送端将每个数据包封装为固定长度(不够的可以通过补0填充),这样接收端每次从接收缓冲区中读取固定长度的数据就自然而然的把每个数据包拆分开来。
- 可以在数据包之间设置边界,如添加特殊符号,这样,接收端通过这个边界就可以将不同的数据包拆分开。
集合
一、常见的集合有哪些?
Java集合类主要由两个根接口Collection和Map派生出来的,Collection派生出了三个子接口:List、Set、Queue(Java5新增的队列),因此Java集合大致也可分成List、Set、Queue、Map四种接口体系。
注意:Collection是一个接口,Collections是一个工具类,Map不是Collection的子接口。
Java集合框架图如下:

图中,List代表了有序可重复集合,可直接根据元素的索引来访问;Set代表无序不可重复集合,只能根据元素本身来访问;Queue是队列集合。
Map代表的是存储key-value对的集合,可根据元素的key来访问value。
上图中淡绿色背景覆盖的是集合体系中常用的实现类,分别是ArrayList、LinkedList、ArrayQueue、HashSet、TreeSet、HashMap、TreeMap等实现类。
1、线程安全的集合有哪些?线程不安全的呢?
线程安全的:
- Hashtable:比HashMap多了个线程安全。
- ConcurrentHashMap:是一种高效但是线程安全的集合。
- Vector:比Arraylist多了个同步化机制。
- Stack:栈,也是线程安全的,继承于Vector。
线性不安全的:
- HashMap
- Arraylist
- LinkedList
- HashSet
- TreeSet
- TreeMap
2、Arraylist与 LinkedList 异同点?
- 是否保证线程安全: ArrayList 和 LinkedList 都是不同步的,也就是不保证线程安全;
- 底层数据结构: Arraylist 底层使用的是Object数组;LinkedList 底层使用的是双向循环链表数据结构;
- 插入和删除是否受元素位置的影响: ArrayList 采用数组存储,所以插入和删除元素的时间复杂度受元素位置的影响。 比如:执行add(E e)方法的时候, ArrayList 会默认在将指定的元素追加到此列表的末尾,这种情况时间复杂度就是O(1)。但是如果要在指定位置 i 插入和删除元素的话(add(int index, E element))时间复杂度就为 O(n-i)。因为在进行上述操作的时候集合中第 i 和第 i 个元素之后的(n-i)个元素都要执行向后位/向前移一位的操作。 LinkedList 采用链表存储,所以插入,删除元素时间复杂度不受元素位置的影响,都是近似 O(1)而数组为近似 O(n)。
- 是否支持快速随机访问: LinkedList 不支持高效的随机元素访问,而ArrayList 实现了RandmoAccess 接口,所以有随机访问功能。快速随机访问就是通过元素的序号快速获取元素对象(对应于get(int index)方法)。
- 内存空间占用: ArrayList的空 间浪费主要体现在在list列表的结尾会预留一定的容量空间,而LinkedList的空间花费则体现在它的每一个元素都需要消耗比ArrayList更多的空间(因为要存放直接后继和直接前驱以及数据)。
二、HashMap
1、存储结构
HashMap的底层数据结构是什么?
在JDK1.7 和JDK1.8 中有所差别:
在JDK1.7 中,由“数组+链表”组成,数组是 HashMap 的主体,链表则是主要为了解决哈希冲突而存在的。
在JDK1.8 中,由“数组+链表+红黑树”组成。当链表过长,则会严重影响 HashMap 的性能,红黑树搜索时间复杂度是 O(logn),而链表是糟糕的 O(n)。因此,JDK1.8 对数据结构做了进一步的优化,引入了红黑树,链表和红黑树在达到一定条件会进行转换:
-
当链表超过 8 且数据总量超过 64 才会转红黑树。
-
将链表转换成红黑树前会判断,如果当前数组的长度小于 64,那么会选择先进行数组扩容,而不是转换为红黑树,以减少搜索时间。

为什么在解决 hash 冲突的时候,不直接用红黑树?而选择先用链表,再转红黑树?
因为红黑树需要进行左旋,右旋,变色这些操作来保持平衡,而单链表不需要。当元素小于 8 个的时候,此时做查询操作,链表结构已经能保证查询性能。当元素大于 8 个的时候, 红黑树搜索时间复杂度是 O(logn),而链表是 O(n),此时需要红黑树来加快查询速度,但是新增节点的效率变慢了。
因此,如果一开始就用红黑树结构,元素太少,新增效率又比较慢,无疑这是浪费性能的。
不用红黑树,用二叉查找树可以么?
可以。但是二叉查找树在特殊情况下会变成一条线性结构(这就跟原来使用链表结构一样了,造成很深的问题),遍历查找会非常慢。
为什么链表改为红黑树的阈值是 8?
理想情况下使用随机的哈希码,容器中节点分布在 hash 桶中的频率遵循泊松分布,按照泊松分布的计算公式计算出了桶中元素个数和概率的对照表,可以看到链表中元素个数为 8 时的概率已经非常小,再多的就更少了,所以原作者在选择链表元素个数时选择了 8,是根据概率统计而选择的。
为什么不用双链表?HashMap1.8中引入红黑树的原因是?为什么要用红黑树而不是平衡二叉树?
- 使用链表是为了解决哈希冲突,使用单链表就可以完成,使用双链表需要更大的存储空间。
- 为了提高HashMap的性能,在解决发生哈希碰撞后,链表过长导致索引效率慢的问题,同时红黑树解决快速增删改查特点。
- 红黑树的平衡度相比平衡二叉树要低,对于删除、插入数据之后重新构造树的开销要比平衡二叉树低,查询效率比普通二叉树高,所以选择性能相对折中的红黑树。
2、字段结构
默认加载因子是多少?为什么是 0.75,不是 0.6 或者 0.8 ?
回答这个问题前,我们来先看下HashMap的默认构造函数:
int threshold; // 容纳键值对的最大值
final float loadFactor; // 负载因子
int modCount;
int size;
Node[] table的初始化长度length(默认值是16),Load factor为负载因子(默认值是0.75),threshold是HashMap所能容纳键值对的最大值。threshold = length * Load factor。也就是说,在数组定义好长度之后,负载因子越大,所能容纳的键值对个数越多。
默认的loadFactor是0.75,0.75是对空间和时间效率的一个平衡选择,一般不要修改,除非在时间和空间比较特殊的情况下 :
如果内存空间很多而又对时间效率要求很高,可以降低负载因子Load factor的值 。
相反,如果内存空间紧张而对时间效率要求不高,可以增加负载因子loadFactor的值,这个值可以大于1。
3、索引计算
HashMap 中 key 的存储索引是怎么计算的?
首先根据key的值计算出hashcode的值,然后根据hashcode计算出hash值,最后通过hash&(length-1)计算得到存储的位置。看看源码的实现:
// jdk1.7
方法一:
static int hash(int h) {
int h = hashSeed;
if (0 != h && k instanceof String) {
return sun.misc.Hashing.stringHash32((String) k);
}
h ^= k.hashCode(); // 为第一步:取hashCode值
h ^= (h >>> 20) ^ (h >>> 12);
return h ^ (h >>> 7) ^ (h >>> 4);
}
方法二:
static int indexFor(int h, int length) { //jdk1.7的源码,jdk1.8没有这个方法,但实现原理一样
return h & (length-1); //第三步:取模运算
}
// jdk1.8
static final int hash(Object key) {
int h;
return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16);
/*
h = key.hashCode() 为第一步:取hashCode值
h ^ (h >>> 16) 为第二步:高位参与运算
*/
}
这里的 Hash 算法本质上就是三步:取key的 hashCode 值、根据 hashcode 计算出hash值、通过取模计算下标。其中,JDK1.7和1.8的不同之处,就在于第二步。我们来看下详细过程,以JDK1.8为例,n为table的长度。

JDK1.8 为什么要 hashcode 异或其右移十六位的值?
因为在JDK 1.7 中扰动了 4 次,计算 hash 值的性能会稍差一点点。 从速度、功效、质量来考虑,JDK1.8 优化了高位运算的算法,通过hashCode()的高16位异或低16位实现:(h = k.hashCode()) ^ (h >>> 16)。这么做可以在数组 table 的 length 比较小的时候,也能保证考虑到高低Bit都参与到Hash的计算中,同时不会有太大的开销。
为什么 hash 值要与length-1相与?
把 hash 值对数组长度取模运算,模运算的消耗很大,没有位运算快。
当 length 总是 2 的n次方时,h& (length-1) 运算等价于对length取模,也就是 h%length,但是 & 比 % 具有更高的效率。
HashMap数组的长度为什么是 2 的幂次方?
这样做效果上等同于取模,在速度、效率上比直接取模要快得多。除此之外,2 的 N 次幂有助于减少碰撞的几率。如果 length 为2的幂次方,则 length-1 转化为二进制必定是11111……的形式,在与h的二进制与操作效率会非常的快,而且空间不浪费。我们来举个例子,看下图:

当 length =15时,6 和 7 的结果一样,这样表示他们在 table 存储的位置是相同的,也就是产生了碰撞,6、7就会在一个位置形成链表,4和5的结果也是一样,这样就会导致查询速度降低。
如果我们进一步分析,还会发现空间浪费非常大,以 length=15 为例,在 1、3、5、7、9、11、13、15 这八处没有存放数据。因为hash值在与14(即 1110)进行&运算时,得到的结果最后一位永远都是0,即 0001、0011、0101、0111、1001、1011、1101、1111位置处是不可能存储数据的。
补充数组容量计算的小奥秘
HashMap 构造函数允许用户传入的容量不是 2 的 n 次方,因为它可以自动地将传入的容量转换为 2 的 n 次方。会取大于或等于这个数的 且最近的2次幂作为 table 数组的初始容量,使用tableSizeFor(int)方法,如 tableSizeFor(10) = 16(2 的 4 次幂),tableSizeFor(20) = 32(2 的 5 次幂),也就是说 table 数组的长度总是 2 的次幂。
put方法
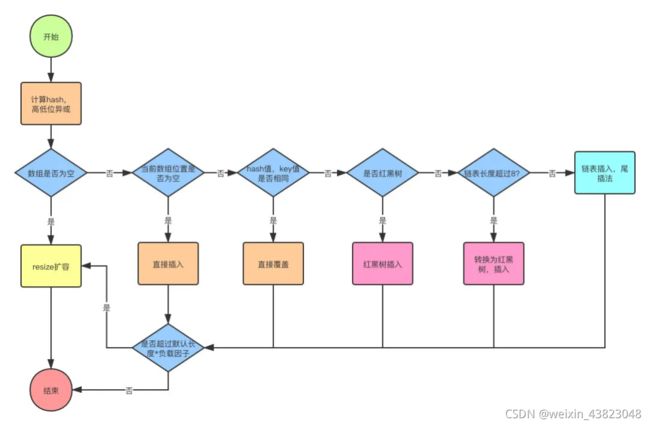
HashMap 的put方法流程?
往map插入元素的时候首先通过对key hash然后与数组长度-1进行与运算((n-1)&hash),都是2的次幂所以等同于取模,但是位运算的效率更高。找到数组中的位置之后,如果数组中没有元素直接存入,反之则判断key是否相同,key相同就覆盖,否则就会插入到链表的尾部,如果链表的长度超过8,则会转换成红黑树,最后判断数组长度是否超过默认的长度*负载因子也就是12,超过则进行扩容。
get查询数据
查询数据相对来说就比较简单了,首先计算出hash值,然后去数组查询,是红黑树就去红黑树查,链表就遍历链表查询就可以了。
resize扩容过程
扩容的过程就是对key重新计算hash,然后把数据拷贝到新的数组。
4、扩容机制
HashMap 的扩容方式?
Hashmap 在容量超过负载因子所定义的容量之后,就会扩容。Java 里的数组是无法自动扩容的,方法是将 Hashmap 的大小扩大为原来数组的两倍,并将原来的对象放入新的数组中。
那扩容的具体步骤是什么?让我们看看源码。
先来看下JDK1.7 的代码:
void resize(int newCapacity) { //传入新的容量
Entry[] oldTable = table; //引用扩容前的Entry数组
int oldCapacity = oldTable.length;
if (oldCapacity == MAXIMUM_CAPACITY) { //扩容前的数组大小如果已经达到最大(2^30)了
threshold = Integer.MAX_VALUE; //修改阈值为int的最大值(2^31-1),这样以后就不会扩容了
return;
}
Entry[] newTable = new Entry[newCapacity]; //初始化一个新的Entry数组
transfer(newTable); //!!将数据转移到新的Entry数组里
table = newTable; //HashMap的table属性引用新的Entry数组
threshold = (int)(newCapacity * loadFactor);//修改阈值
}
这里就是使用一个容量更大的数组来代替已有的容量小的数组,transfer()方法将原有Entry数组的元素拷贝到新的Entry数组里。
void transfer(Entry[] newTable) {
Entry[] src = table; //src引用了旧的Entry数组
int newCapacity = newTable.length;
for (int j = 0; j < src.length; j++) { //遍历旧的Entry数组
Entry<K,V> e = src[j]; //取得旧Entry数组的每个元素
if (e != null) {
src[j] = null;//释放旧Entry数组的对象引用(for循环后,旧的Entry数组不再引用任何对象)
do {
Entry<K,V> next = e.next;
int i = indexFor(e.hash, newCapacity); //!!重新计算每个元素在数组中的位置
e.next = newTable[i]; //标记[1]
newTable[i] = e; //将元素放在数组上
e = next; //访问下一个Entry链上的元素
} while (e != null);
}
}
}
newTable[i] 的引用赋给了 e.next ,也就是使用了单链表的头插入方式,同一位置上新元素总会被放在链表的头部位置;这样先放在一个索引上的元素终会被放到 Entry 链的尾部(如果发生了 hash 冲突的话)。
扩容在JDK1.8中有什么不一样?
JDK1.8做了两处优化:
-
resize 之后,元素的位置在原来的位置,或者原来的位置 +oldCap (原来哈希表的长度)。不需要像 JDK1.7 的实现那样重新计算hash ,只需要看看原来的 hash 值新增的那个bit是1还是0就好了,是0的话索引没变,是1的话索引变成“原索引 + oldCap ”。这个设计非常的巧妙,省去了重新计算 hash 值的时间。
-
JDK1.7 中 rehash 的时候,旧链表迁移新链表的时候,如果在新表的数组索引位置相同,则链表元素会倒置(头插法)。JDK1.8 不会倒置,使用尾插法。
5、HashMap为什么线程不安全?
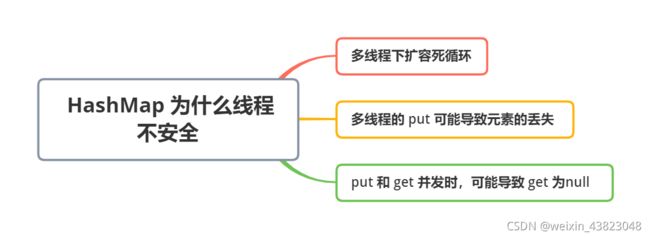
- 多线程下扩容死循环。JDK1.7中的 HashMap 使用头插法插入元素,在多线程的环境下,扩容的时候有可能导致环形链表的出现,形成死循环。因此,JDK1.8使用尾插法插入元素,在扩容时会保持链表元素原本的顺序,不会出现环形链表的问题。
- 多线程的put可能导致元素的丢失。多线程同时执行 put 操作,如果计算出来的索引位置是相同的,那会造成前一个 key 被后一个 key 覆盖,从而导致元素的丢失。此问题在JDK 1.7和 JDK 1.8 中都存在。
- put和get并发时,可能导致get为null。线程1执行put时,因为元素个数超出threshold而导致rehash,线程2此时执行get,有可能导致这个问题。此问题在JDK 1.7和 JDK 1.8 中都存在。
三、ConcurrentHashMap
1、ConcurrentHashMap简介
1)CurrentHashMap(JDK1.7版本)
在JDK1.7中ConcurrentHashMap采用了数组+Segment分段锁的方式实现。
- Segment(分段锁):ConcurrentHashMap中的分段锁称为Segment,它即类似于HashMap的结构,即内部拥有一个Entry数组,数组中的每个元素又是一个链表,同时又是一个ReentrantLock(Segment继承了ReentrantLock)。
- 内部结构:ConcurrentHashMap使用分段锁技术,将数据分成一段一段的存储,然后给每一段数据配一把锁,当一个线程占用锁访问其中一个段数据的时候,其他段的数据也能被其他线程访问,能够实现真正的并发访问。
优点:写操作的时候可以只对元素所在的Segment进行加锁即可,不会影响到其他的Segment,这样,ConcurrentHashMap的并发度就是segment的大小,默认为16,这意味着最多同时可以有16条线程操作ConcurrentHashMap。
缺点:ConcurrentHashMap定位一个元素的过程需要进行两次Hash操作:第一次Hash定位到Segment,第二次Hash定位到元素所在的链表的头部。这一种结构的带来的副作用是Hash的过程要比普通的HashMap要长。
2)CurrentHashMap(JDK1.8版本)
JDK8中ConcurrentHashMap的采用了数组+链表+红黑树的实现方式来设计,内部大量采用CAS操作。JDK8中ConcurrentHashMap在链表的长度大于某个阈值的时候会将链表转换成红黑树进一步提高其查找性能。
JDK8中彻底放弃了Segment转而采用的是Node,其设计思想也不再是JDK1.7中的分段锁思想。Node:保存key,value及key的hash值的数据结构。其中value和next都用volatile修饰,保证并发的可见性。Java8 ConcurrentHashMap结构基本上和Java8的HashMap一样,不过保证线程安全性。
2、ConcurrentHashMap 的 put 方法执行逻辑是什么?
先来看JDK1.7
首先,会尝试获取锁,如果获取失败,利用自旋获取锁;如果自旋重试的次数超过 64 次,则改为阻塞获取锁。
获取到锁后:
- 将当前 Segment 中的 table 通过 key 的 hashcode 定位到 HashEntry。
- 遍历该 HashEntry,如果不为空则判断传入的 key 和当前遍历的 key 是否相等,相等则覆盖旧的 value。
- 不为空则需要新建一个 HashEntry 并加入到 Segment 中,同时会先判断是否需要扩容。
- 释放 Segment 的锁。
再来看JDK1.8
大致可以分为以下步骤:
- 根据 key 计算出 hash值。
- 判断是否需要进行初始化。
- 定位到 Node,拿到首节点 f,判断首节点 f:
- 如果为 null ,则通过cas的方式尝试添加。
- 如果为 f.hash = MOVED = -1 ,说明其他线程在扩容,参与一起扩容。
- 如果都不满足 ,synchronized 锁住 f 节点,判断是链表还是红黑树,遍历插入。
- 当在链表长度达到8的时候,数组扩容或者将链表转换为红黑树。
3.HashMap、HashTable、ConcurrentHashMap的原理与区别?
HashTable
底层数组+链表实现,无论key还是value都不能为null,线程安全,实现线程安全的方式是在修改数据时锁住整个HashTable,效率低,ConcurrentHashMap做了相关优化
初始size为11,扩容:newsize = olesize*2+1
计算index的方法:index = (hash & 0x7FFFFFFF) % tab.length
HashMap
底层数组+链表实现,可以存储null键和null值,线程不安全
初始size为16,扩容:newsize = oldsize*2,size一定为2的n次幂
扩容针对整个Map,每次扩容时,原来数组中的元素依次重新计算存放位置,并重新插入
插入元素后才判断该不该扩容,有可能无效扩容(插入后如果扩容,如果没有再次插入,就会产生无效扩容)
当Map中元素总数超过Entry数组的75%,触发扩容操作,为了减少链表长度,元素分配更均匀
计算index方法:index = hash & (tab.length – 1)
ConcurrentHashMap
底层采用分段的数组+链表实现,线程安全
通过把整个Map分为N个Segment,可以提供相同的线程安全,但是效率提升N倍,默认提升16倍。(读操作不加锁,由于HashEntry的value变量是 volatile的,也能保证读取到最新的值。)
Hashtable的synchronized是针对整张Hash表的,即每次锁住整张表让线程独占,ConcurrentHashMap允许多个修改操作并发进行,其关键在于使用了锁分离技术
有些方法需要跨段,比如size()和containsValue(),它们可能需要锁定整个表而而不仅仅是某个段,这需要按顺序锁定所有段,操作完毕后,又按顺序释放所有段的锁
扩容:段内扩容(段内元素超过该段对应Entry数组长度的75%触发扩容,不会对整个Map进行扩容),插入前检测需不需要扩容,有效避免无效扩容
四、讲一讲快速失败(fail-fast)和安全失败(fail-safe)
快速失败(fail—fast)
在用迭代器遍历一个集合对象时,如果遍历过程中对集合对象的内容进行了修改(增加、删除、修改),则会抛出Concurrent Modification Exception。
原理:迭代器在遍历时直接访问集合中的内容,并且在遍历过程中使用一个 modCount 变量。集合在被遍历期间如果内容发生变化,就会改变modCount的值。每当迭代器使用hashNext()/next()遍历下一个元素之前,都会检测modCount变量是否为expectedmodCount值,是的话就返回遍历;否则抛出异常,终止遍历。
注意:这里异常的抛出条件是检测到 modCount!=expectedmodCount 这个条件。如果集合发生变化时修改modCount值刚好又设置为了expectedmodCount值,则异常不会抛出。因此,不能依赖于这个异常是否抛出而进行并发操作的编程,这个异常只建议用于检测并发修改的bug。
场景:java.util包下的集合类都是快速失败的,不能在多线程下发生并发修改(迭代过程中被修改),比如HashMap、ArrayList 这些集合类。
安全失败(fail—safe)
采用安全失败机制的集合容器,在遍历时不是直接在集合内容上访问的,而是先复制原有集合内容,在拷贝的集合上进行遍历。
原理:由于迭代时是对原集合的拷贝进行遍历,所以在遍历过程中对原集合所作的修改并不能被迭代器检测到,所以不会触发Concurrent Modification Exception。
缺点:基于拷贝内容的优点是避免了Concurrent Modification Exception,但同样地,迭代器并不能访问到修改后的内容,即:迭代器遍历的是开始遍历那一刻拿到的集合拷贝,在遍历期间原集合发生的修改迭代器是不知道的。
场景:java.util.concurrent包下的容器都是安全失败,可以在多线程下并发使用,并发修改,比如:ConcurrentHashMap。
多线程
一、线程和进程的关系
进程是程序的一次执行,是系统进行资源分配和调度的独立单位,他的作用是是程序能够并发执行提高资源利用率和吞吐率。
由于进程是资源分配和调度的基本单位,因为进程的创建、销毁、切换产生大量的时间和空间的开销,进程的数量不能太多,而线程是比进程更小的能独立运行的基本单位,他是进程的一个实体,可以减少程序并发执行时的时间和空间开销,使得操作系统具有更好的并发性。
线程基本不拥有系统资源,只有一些运行时必不可少的资源,比如程序计数器、寄存器和栈,进程则占有堆、栈。
一个进程中可以有多个线程,多个线程共享进程的堆和方法区 (JDK1.8 之后的元空间)资源,但是每个线程有自己的程序计数器、虚拟机栈 和 本地方法栈。
总结: 线程是进程划分成的更小的运行单位。线程和进程最大的不同在于基本上各进程是独立的,而各线程则不一定,因为同一进程中的线程极有可能会相互影响。线程执行开销小,但不利于资源的管理和保护;而进程正相反。
二、说说线程的生命周期及五种基本状态?

新建(new):新创建了一个线程对象。
可运行(runnable):线程对象创建后,当调用线程对象的 start()方法,该线程处于就绪状态,等待被线程调度选中,获取cpu的使用权。
运行(running):可运行状态(runnable)的线程获得了cpu时间片(timeslice),执行程序代码。注:就绪状态是进入到运行状态的唯一入口,也就是说,线程要想进入运行状态执行,首先必须处于就绪状态中;
阻塞(block):处于运行状态中的线程由于某种原因,暂时放弃对 CPU的使用权,停止执行,此时进入阻塞状态,直到其进入到就绪状态,才 有机会再次被 CPU 调用以进入到运行状态。
阻塞的情况分三种:
(一). 等待阻塞:运行状态中的线程执行 wait()方法,JVM会把该线程放入等待队列(waitting queue)中,使本线程进入到等待阻塞状态;
(二). 同步阻塞:线程在获取 synchronized 同步锁失败(因为锁被其它线程所占用),,则JVM会把该线程放入锁池(lock pool)中,线程会进入同步阻塞状态;
(三). 其他阻塞: 通过调用线程的 sleep()或 join()或发出了 I/O 请求时,线程会进入到阻塞状态。当 sleep()状态超时、join()等待线程终止或者超时、或者 I/O 处理完毕时,线程重新转入就绪状态。
死亡(dead):线程run()、main()方法执行结束,或者因异常退出了run()方法,则该线程结束生命周期。死亡的线程不可再次复生。
什么是线程死锁?如何避免死锁?
死锁
多个线程同时被阻塞,它们中的一个或者全部都在等待某个资源被释放。由于线程被无限期地阻塞,因此程序不可能正常终止。
死锁必须具备以下四个条件:
-
互斥条件:该资源任意一个时刻只由一个线程占用。
-
请求与保持条件:一个进程因请求资源而阻塞时,对已获得的资源保持不放。
-
不剥夺条件:线程已获得的资源在末使用完之前不能被其他线程强行剥夺,只有自己使用完毕后才释放资源。
-
循环等待条件:若干进程之间形成一种头尾相接的循环等待资源关系。
如何避免线程死锁?
只要破坏产生死锁的四个条件中的其中一个就可以了 -
破坏互斥条件 这个条件我们没有办法破坏,因为我们用锁本来就是想让他们互斥的(临界资源需要互斥访问)
-
破坏请求与保持条件 一次性申请所有的资源。
-
破坏不剥夺条件 占用部分资源的线程进一步申请其他资源时,如果申请不到,可以主动释放它占有的资源。
-
破坏循环等待条件 靠按序申请资源来预防。按某一顺序申请资源,释放资源则反序释放。破坏循环等待条件。
-
锁排序法:(必须回答出来的点) 指定获取锁的顺序,比如某个线程只有获得A锁和B锁,才能对某资源进行操作,在多线程条件下,如何避免死锁? 通过指定锁的获取顺序,比如规定,只有获得A锁的线程才有资格获取B锁,按顺序获取锁就可以避免死锁。这通常被认为是解决死锁很好的一种方法。
-
使用显式锁中的ReentrantLock.try(long,TimeUnit)来申请锁
线程之间如何通信
方式一:同步
这里讲的同步是指多个线程通过synchronized关键字这种方式来实现线程间的通信。这种方式,本质上就是“共享内存”式的通信。多个线程需要访问同一个共享变量,谁拿到了锁(获得了访问权限),谁就可以执行。
方式二:while轮询的方式
在这种方式下,线程A不断地改变条件,线程ThreadB不停地通过while语句检测这个条件(例如,list.size==5)是否成立 ,从而实现了线程间的通信。但是这种方式会浪费CPU资源。之所以说它浪费资源,是因为JVM调度器将CPU交给线程B执行时,它没做啥“有用”的工作,只是在不断地测试某个条件是否成立。
方式三:wait/notify机制
这里用到了Object类的 wait 和 notify 方法。
当条件未满足时(list.size !=5),线程A调用wait 放弃CPU,并进入阻塞状态。—不像while轮询那样占用CPU
当条件满足时,线程B调用 notify通知线程A,所谓通知线程A,就是唤醒线程A,并让它进入可运行状态。
这种方式的一个好处就是CPU的利用率提高了。
但是也有一些缺点:比如,线程B先执行,一下子添加了5个元素并调用了notify发送了通知,而此时线程A还执行;当线程A执行并调用wait时,那它永远就不可能被唤醒了。因为,线程B已经发了通知了,以后不再发通知了。这说明:通知过早,会打乱程序的执行逻辑。
方式四:管道通信
就是使用java.io.PipedInputStream 和 java.io.PipedOutputStream进行通信,更像消息传递机制,也就是说:通过管道,将一个线程中的消息发送给另一个。
三、线程池
为什么要使用线程池
1)降低资源消耗。 通过重复利用已经创建的线程降低线程创建的和销毁造成的消耗。例如,工作线程Woker会无线循环获取阻塞队列中的任务来执行。
2)提高响应速度。 当任务到达时,任务可以不需要等到线程创建就能立即执行。
3)提高线程的可管理性。 线程是稀缺资源,Java的线程池可以对线程资源进行统一分配、调优和监控。
ThreadPoolExecutor的工作流程
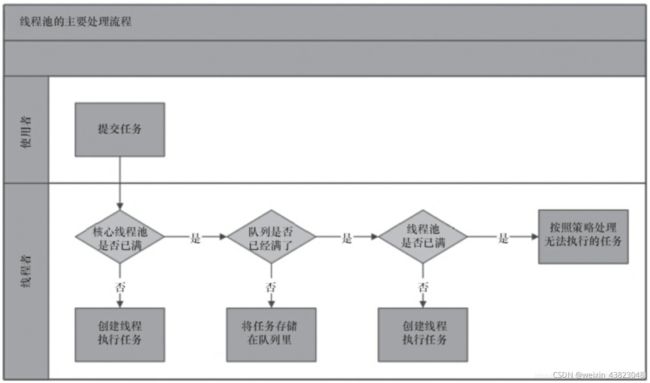
- 当我们提交任务,线程池会根据corePoolSize大小创建若干任务数量线程执行任务
- 当任务的数量超过corePoolSize数量,后续的任务将会进入阻塞队列阻塞排队
- 当阻塞队列也满了之后,那么将会继续创建(maximumPoolSize-corePoolSize)个数量的线程来执行任务,如果任务处理完成,maximumPoolSize-corePoolSize额外创建的线程等待keepAliveTime之后被自动销毁
- 如果达到maximumPoolSize,阻塞队列还是满的状态,那么将根据不同的拒绝策略对应处理
AbortPolicy:直接丢弃任务,抛出异常,这是默认策略
CallerRunsPolicy:只用调用者所在的线程来处理任务
DiscardOldestPolicy:丢弃等待队列中最旧的任务,并执行当前任务
DiscardPolicy:直接丢弃任务,也不抛出异常
核心线程池ThreadPoolExecutor的参数
常用的5个,核心池、最大池、空闲时间、时间的单位、阻塞队列;另外两个:拒绝策略、线程工厂类
corePoolSize:指定了线程池中的线程数量
maximumPoolSize:指定了线程池中的最大线程数量
keepAliveTime:线程池维护线程所允许的空闲时间
unit: keepAliveTime 的单位。
workQueue:任务队列,被提交但尚未被执行的任务。
threadFactory:线程工厂,用于创建线程,一般用默认的即可。
handler:拒绝策略。当任务太多来不及处理,如何拒绝任务。
具体详细说明:
corePoolSize(线程池的基本大小):
提交一个任务到线程池时,线程池会创建一个新的线程来执行任务。注意: 即使有空闲的基本线程能执行该任务,也会创建新的线程。
如果线程池中的线程数已经大于或等于corePoolSize,则不会创建新的线程。
如果调用了线程池的prestartAllCoreThreads()方法,线程池会提前创建并启动所有基本线程。
maximumPoolSize(线程池的最大数量): 线程池允许创建的最大线程数。
阻塞队列已满,线程数小于maximumPoolSize便可以创建新的线程执行任务。
如果使用无界的阻塞队列,该参数没有什么效果。
workQueue(工作队列): 用于保存等待执行的任务的阻塞队列。
ArrayBlockingQueue: 基于数组结构的有界阻塞队列,按FIFO(先进先出)原则对任务进行排序。使用该队列,线程池中能创建的最大线程数为maximumPoolSize。
LinkedBlockingQueue: 基于链表结构的无界阻塞队列,按FIFO(先进先出)原则对任务进行排序,吞吐量高于ArrayBlockingQueue。使用该队列,线程池中能创建的最大线程数为corePoolSize。静态工厂方法 Executor.newFixedThreadPool()使用了这个队列。
SynchronousQueue: 一个不存储元素的阻塞队列。添加任务的操作必须等到另一个线程的移除操作,否则添加操作一直处于阻塞状态。静态工厂方法 Executor.newCachedThreadPool()使用了这个队列。
PriorityBlokingQueue: 一个支持优先级的无界阻塞队列。使用该队列,线程池中能创建的最大线程数为corePoolSize。
keepAliveTime(线程活动保持时间): 线程池的工作线程空闲后,保持存活的时间。如果任务多而且任务的执行时间比较短,可以调大keepAliveTime,提高线程的利用率。
unit(线程活动保持时间的单位): 可选单位有DAYS、HOURS、MINUTES、毫秒、微秒、纳秒。
handler(饱和策略,或者又称拒绝策略): 当队列和线程池都满了,即线程池饱和了,必须采取一种策略处理提交的新任务。
AbortPolicy: 无法处理新任务时,直接抛出异常,这是默认策略。
CallerRunsPolicy:用调用者所在的线程来执行任务。
DiscardOldestPolicy:丢弃阻塞队列中最靠前的一个任务,并执行当前任务。
DiscardPolicy: 直接丢弃任务。
threadFactory: 构建线程的工厂类
四、volatile
volatile关键字的作用
volatile关键字的作用就是保证了可见性和有序性(不保证原子性),如果一个共享变量被volatile关键字修饰,那么如果一个线程修改了这个共享变量后,其他线程是立马可知的。
为什么是这样的呢?比如,线程A修改了自己的共享变量副本,这时如果该共享变量没有被volatile修饰,那么本次修改不一定会马上将修改结果刷新到主存中,如果此时B去主存中读取共享变量的值,那么这个值就是没有被A修改之前的值。如果该共享变量被volatile修饰了,那么本次修改结果会强制立刻刷新到主存中,如果此时B去主存中读取共享变量的值,那么这个值就是被A修改之后的值了。
volatile能禁止指令重新排序,在指令重排序优化时,在volatile变量之前的指令不能在volatile之后执行,在volatile之后的指令也不能在volatile之前执行,所以它保证了有序性。
内存屏障
再来说内存屏障的问题,volatile修饰之后会加入不同的内存屏障来保证可见性的问题能正确执行。这里写的屏障基于书中提供的内容,但是实际上由于CPU架构不同,重排序的策略不同,提供的内存屏障也不一样,比如x86平台上,只有StoreLoad一种内存屏障。
StoreStore屏障,保证上面的普通写不和volatile写发生重排序
StoreLoad屏障,保证volatile写与后面可能的volatile读写不发生重排序
LoadLoad屏障,禁止volatile读与后面的普通读重排序
LoadStore屏障,禁止volatile读和后面的普通写重排序

volatile关键字和synchronized关键字的区别
1)volatile只能作用于变量,使用范围较小。synchronized可以用在变量、方法、类、同步代码块等,使用范围比较广。
2)volatile只能保证可见性和有序性,不能保证原子性。而可见性、有序性、原子性synchronized都可以保证。
3)volatile不会造成线程阻塞。synchronized可能会造成线程阻塞。
五、Synchronized
synchronized是java提供的原子性内置锁,这种内置的并且使用者看不到的锁也被称为监视器锁,使用synchronized之后,会在编译之后在同步的代码块前后加上monitorenter和monitorexit字节码指令,他依赖操作系统底层互斥锁实现。他的作用主要就是实现原子性操作和解决共享变量的内存可见性问题。
执行monitorenter指令时会尝试获取对象锁,如果对象没有被锁定或者已经获得了锁,锁的计数器+1。此时其他竞争锁的线程则会进入等待队列中。
执行monitorexit指令时则会把计数器-1,当计数器值为0时,则锁释放,处于等待队列中的线程再继续竞争锁。
synchronized是排它锁,当一个线程获得锁之后,其他线程必须等待该线程释放锁后才能获得锁,而且由于Java中的线程和操作系统原生线程是一一对应的,线程被阻塞或者唤醒时时会从用户态切换到内核态,这种转换非常消耗性能。
从内存语义来说,加锁的过程会清除工作内存中的共享变量,再从主内存读取,而释放锁的过程则是将工作内存中的共享变量写回主内存。
实际上大部分时候我认为说到monitorenter就行了,但是为了更清楚的描述,还是再具体一点。
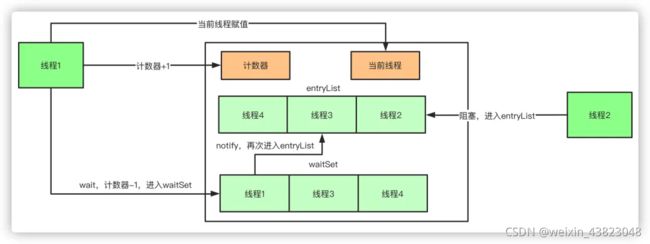
如果再深入到源码来说,synchronized实际上有两个队列waitSet和entryList。
- 当多个线程进入同步代码块时,首先进入entryList
- 有一个线程获取到monitor锁后,就赋值给当前线程,并且计数器+1
- 如果线程调用wait方法,将释放锁,当前线程置为null,计数器-1,同时进入waitSet等待被唤醒,调用notify或者notifyAll之后又会进入entryList竞争锁
- 如果线程执行完毕,同样释放锁,计数器-1,当前线程置为null
synchronized的锁优化机制
那锁的优化机制了解吗?
从JDK1.6版本之后,synchronized本身也在不断优化锁的机制,有些情况下他并不会是一个很重量级的锁了。优化机制包括自适应锁、自旋锁、锁消除、锁粗化、轻量级锁和偏向锁。
锁的状态从低到高依次为无锁->偏向锁->轻量级锁->重量级锁,升级的过程就是从低到高,降级在一定条件也是有可能发生的。
自旋锁:由于大部分时候,锁被占用的时间很短,共享变量的锁定时间也很短,所有没有必要挂起线程,用户态和内核态的来回上下文切换严重影响性能。自旋的概念就是让线程执行一个忙循环,可以理解为就是啥也不干,防止从用户态转入内核态,自旋锁可以通过设置-XX:+UseSpining来开启,自旋的默认次数是10次,可以使用-XX:PreBlockSpin设置。
自适应锁:自适应锁就是自适应的自旋锁,自旋的时间不是固定时间,而是由前一次在同一个锁上的自旋时间和锁的持有者状态来决定。
锁消除:锁消除指的是JVM检测到一些同步的代码块,完全不存在数据竞争的场景,也就是不需要加锁,就会进行锁消除。
锁粗化:锁粗化指的是有很多操作都是对同一个对象进行加锁,就会把锁的同步范围扩展到整个操作序列之外。
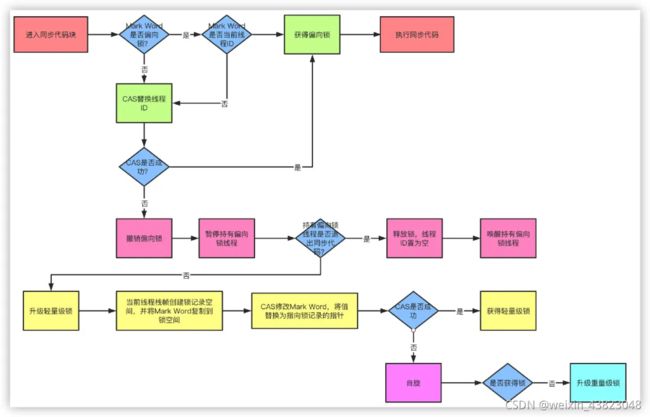
偏向锁:当线程访问同步块获取锁时,会在对象头和栈帧中的锁记录里存储偏向锁的线程ID,之后这个线程再次进入同步块时都不需要CAS来加锁和解锁了,偏向锁会永远偏向第一个获得锁的线程,如果后续没有其他线程获得过这个锁,持有锁的线程就永远不需要进行同步,反之,当有其他线程竞争偏向锁时,持有偏向锁的线程就会释放偏向锁。可以用过设置-XX:+UseBiasedLocking开启偏向锁。
轻量级锁:JVM的对象的对象头中包含有一些锁的标志位,代码进入同步块的时候,JVM将会使用CAS方式来尝试获取锁,如果更新成功则会把对象头中的状态位标记为轻量级锁,如果更新失败,当前线程就尝试自旋来获得锁。
整个锁升级的过程非常复杂,我尽力去除一些无用的环节,简单来描述整个升级的机制。
简单点说,偏向锁就是通过对象头的偏向线程ID来对比,甚至都不需要CAS了,而轻量级锁主要就是通过CAS修改对象头锁记录和自旋来实现,重量级锁则是除了拥有锁的线程其他全部阻塞。
synchronized 为什么是非公平锁?非公平体现在哪些地方?
synchronized 的非公平其实在源码中应该有不少地方,因为设计者就没按公平锁来设计,核心有以下几个点:
1)当持有锁的线程释放锁时,该线程会执行以下两个重要操作:
先将锁的持有者 owner 属性赋值为 null
唤醒等待链表中的一个线程(假定继承者)。
在1和2之间,如果有其他线程刚好在尝试获取锁(例如自旋),则可以马上获取到锁。
2)当线程尝试获取锁失败,进入阻塞时,放入链表的顺序,和最终被唤醒的顺序是不一致的,也就是说你先进入链表,不代表你就会先被唤醒。
synchronized 锁能降级吗?
可以的。
具体的触发时机:在全局安全点(safepoint)中,执行清理任务的时候会触发尝试降级锁。
当锁降级时,主要进行了以下操作:
1)恢复锁对象的 markword 对象头;
2)重置 ObjectMonitor,然后将该 ObjectMonitor 放入全局空闲列表,等待后续使用。
双重校验锁实现对象单例(线程安全)
有可能构造函数在对象初始化完成前就赋值完成了,在内存里面开辟了一片存储区域后直接返回内存的引用,这个时候还没真正的初始化完对象。
但是别的线程去判断instance!=null,直接拿去用了,其实这个对象是个半成品,那就有空指针异常了。
public class Singleton {
private volatile static Singleton instance = null;
private Singleton(){}
public static Singleton getInstance(){
//先检查实例是否存在,如果不存在才进入下面的同步块
if(instance == null){
//同步块,线程安全的创建实例
synchronized (Singleton.class) {
//再次检查实例是否存在,如果不存在才真正的创建实例
if(instance == null){
instance = new Singleton();
}
}
}
return instance;
}
}
看下面的情况:在Java指令中创建对象和赋值操作是分开进行的,也就是说instance = new Singleton();语句是分两步执行的。
但是JVM并不保证这两个操作的先后顺序,也就是说有可能JVM会为新的Singleton实例分配空间,然后直接赋值给instance成员,然后再去初始化这个Singleton实例。
这样就可能出错了,我们以A、B两个线程为例:
A、B线程同时进入了第一个if判断
A首先进入synchronized块,由于instance为null,所以它执行instance = new Singleton();
由于JVM内部的优化机制,JVM先画出了一些分配给Singleton实例的空白内存,并赋值给instance成员(注意此时JVM没有开始初始化这个实例),然后A离开了synchronized块。
B进入synchronized块,由于instance此时不是null,因此它马上离开了synchronized块并将结果返回给调用该方法的程序。
此时B线程打算使用Singleton实例,却发现它没有被初始化,于是错误发生了。
六、那对象头具体都包含哪些内容?
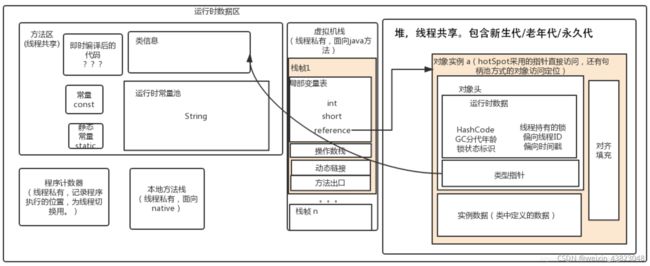
在我们常用的Hotspot虚拟机中,对象在内存中布局实际包含3个部分:
- 对象头
- 实例数据
- 对齐填充
而对象头包含两部分内容,Mark Word中的内容会随着锁标志位而发生变化,所以只说存储结构就好了。
- 对象自身运行时所需的数据,也被称为Mark Word,也就是用于轻量级锁和偏向锁的关键点。具体的内容包含对象的hashcode、分代年龄、轻量级锁指针、重量级锁指针、GC标记、偏向锁线程ID、偏向锁时间戳。
- 存储类型指针,也就是指向类的元数据的指针,通过这个指针才能确定对象是属于哪个类的实例。
如果是数组的话,则还包含了数组的长度
七、ReentrantLock原理?和synchronized有什么区别?
ReetrantLock是一个可重入的独占锁,主要有两个特性,一个是支持公平锁和非公平锁,一个是可重入。 ReetrantLock实现依赖于AQS(AbstractQueuedSynchronizer)。
ReetrantLock主要依靠AQS维护一个阻塞队列,多个线程对加锁时,失败则会进入阻塞队列。等待唤醒,重新尝试加锁。
相比于synchronized,ReentrantLock需要显式的获取锁和释放锁,相对现在基本都是用JDK7和JDK8的版本,ReentrantLock的效率和synchronized区别基本可以持平了。他们的主要区别有以下几点:
- 等待可中断,当持有锁的线程长时间不释放锁的时候,等待中的线程可以选择放弃等待,转而处理其他的任务。
- 公平锁:synchronized和ReentrantLock默认都是非公平锁,但是ReentrantLock可以通过构造函数传参改变。只不过使用公平锁的话会导致性能急剧下降。
- 绑定多个条件:ReentrantLock可以同时绑定多个Condition条件对象。
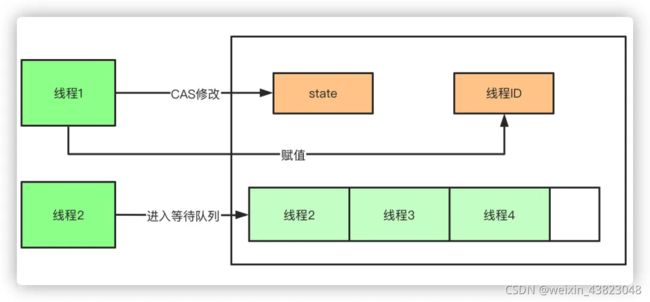
ReentrantLock基于AQS(AbstractQueuedSynchronizer 抽象队列同步器)实现。别说了,我知道问题了,AQS原理我来讲。
AQS内部维护一个state状态位,尝试加锁的时候通过CAS(CompareAndSwap)修改值,如果成功设置为1,并且把当前线程ID赋值,则代表加锁成功,一旦获取到锁,其他的线程将会被阻塞进入阻塞队列自旋,获得锁的线程释放锁的时候将会唤醒阻塞队列中的线程,释放锁的时候则会把state重新置为0,同时当前线程ID置为空。
八、AQS
AQS的实现原理
AQS的实现主要在于维护一个volatile int state(代表共享资源)和一个FIFO线程等待队列(多线程争用资源被阻塞时会进入此队列)。队列中的每个节点是对线程的一个封装,包含线程基本信息,状态,等待的资源类型等。
了解AQS中同步队列的数据结构吗?

- 当前线程获取同步状态失败,同步器将当前线程机等待状态等信息构造成一个Node节点加入队列,放在队尾,同步器重新设置尾节点
- 加入队列后,会阻塞当前线程
- 同步状态被释放并且同步器重新设置首节点,同步器唤醒等待队列中第一个节点,让其再次获取同步状态
了解AQS 对资源的共享方式吗?
AQS定义两种资源共享方式
- Exclusive
(独占):只有一个线程能执行,如ReentrantLock。又可分为公平锁和非公平锁:
公平锁:按照线程在队列中的排队顺序,先到者先拿到锁
非公平锁:当线程要获取锁时,无视队列顺序直接去抢锁,谁抢到就是谁的
- Share(共享):多个线程可同时执行,如Semaphore/CountDownLatch。Semaphore、CountDownLatCh、 CyclicBarrier、ReadWriteLock 我们都会在后面讲到。
ReentrantReadWriteLock 可以看成是组合式,因为ReentrantReadWriteLock也就是读写锁允许多个线程同时对某一资源进行读。
不同的自定义同步器争用共享资源的方式也不同。自定义同步器在实现时只需要实现共享资源 state 的获取与释放方式即可,至于具体线程等待队列的维护(如获取资源失败入队/唤醒出队等),AQS已经在顶层实现好了。
AQS容器
CountDownLatch(闭锁)
CountDownLatch是一个计数器闭锁,用来实现使一个线程等待其他线程各自执行完毕后再执行的功能。CountDownLatch是通过一个计数器来实现的,计数器的初始值是线程的数量。每当一个线程执行完毕后,计数器的值就-1,当计数器的值为0时,表示所有线程都执行完毕,然后在闭锁上等待的线程就可以恢复工作了。
原理:CountDownLatch基于AQS共享锁,await()使当前线程阻塞等待,countDown()计数器递减。AQS全局维护的有一个volatile修饰的state字段,当state为0时就会通知countDownLatch等待线程执行。这也就是所以我们在new CountDownLatch(int n) 时指定的参数,n为多少,也就是要调用多少次countDown()方法。
假设有N个任务,那么可以用N来初始化一个 CountDownLatch,然后将这个 latch 的引用传递到各个线程中,在每个线程完成了任务后,调用 latch.countDown() 代表完成了一个任务。
CyclicBarrier(栅栏)
CyclicBarrier是一个回环栅栏,可重复使用(CountDownLatch只能使用一次)。她的作用就是N个线程相互等待,任何一个线程完成之前,所有的线程都必须等待。CyclicBarrier是一种线程间的屏障,一组线程到达一个屏障(也可以叫同步点)时被阻塞,直到最后一个线程到达屏障时,屏障才会开门,所有被屏障拦截的线程才会继续运行。
CyclicBarrier基于AQS独占锁来执行await方法。
Semaphore(信号量)
Semaphore,信号量,可以限定同时访问的线程个数,用来协调访问资源的线程数量,使其处在一个恒定的值。线程调用 acquire() 获取一个许可,如果没有许可就等待,线程调用 release() 释放一个许可。网络应用中为了保护服务器不被流量洪峰冲夸,会进行限流,限流会使用令牌桶算法,Semaphore就可以实现令牌桶:访问线程先拿到令牌才能访问,访问完后把令牌归还到桶中以便供其他线程使用,就保证了访问资源的线程数量和令牌数量一至。
Semaphore基于AQS共享锁,内部代码布局和ReentrantLock类似,支持公平锁和非公平锁设置,默认为非公平性锁。Semaphore使用中的关键代码,
九、CAS
CAS(Compare and Swap)
1)CAS
CAS(Compare And Swap),即比较并交换,是解决多线程并行情况下使用锁造成性能损耗的一种机制。CAS操作包含三个操作数:内存位置(V)、预期原值(A)和新值(B)。如果内存位置的值与预期原值相匹配,那么处理器会自动将该位置值更新为新值。否则,处理器不做任何操作。无论哪种情况,它都会在CAS指令之前返回该位置的值。CAS有效地说明了“我认为位置V应该包含值A;如果包含该值,则将B放到这个位置;否则,不要更改该位置,只告诉我这个位置现在的值即可。
2)CAS 的底层原理
比较并交换,它是一条CPU并发原语。判断内存某个位置的值是否为预期值,如果是更改为新值,这个过程是原子的。
CAS的底层实现把握好两点:Unsafe类(存在rt.jar中)+ CAS自旋锁。使用了处理器提供的CMPXCHG指令实现。
Unsafe类是CAS的核心类,由于java方法无法直接访问底层系统,需要通过本地(native)方法来访问,Unsafe相当于一个后门,基于该类可以直接操作特定内存的数据。Unsafe类存在于sun.misc包中,其内部方法操作可以像C的指针一样直接操作内存,类中的所有方法都是native修饰的,也就是说Unsafe类中的方法都直接调用操作系统底层资源执行相应任务。
3)CAS 的 三大问题
CAS虽然很高效的解决原子操作,但是CAS仍然存在三大问题。
ABA 问题
循环时间长开销大
只能保证一个共享变量的原子操作
1)ABA 问题
CAS,包含三个值:内存位置(V)、预期原值(A)和新值(B)。当V==A时,则V=B更新成功。但是如果一个值原来是A,变成了B,又变成了A,那么使用CAS进行检查时会发现它的值没有发生变化,但是实际上却变化了。
解决方案:可以对每个值添加一个版本号来判断。在变量前面追加上版本号,每次变量更新的时候把版本号加一,那么A-B-A 就会变成1A-2B-3A。从Java1.5开始JDK的atomic包里提供了一个类AtomicStampedReference来解决ABA问题。这个类的compareAndSet方法作用是首先检查当前引用是否等于预期引用,并且当前标志是否等于预期标志,如果全部相等,则以原子方式将该引用和该标志的值设置为给定的更新值。
2)循环时间长开销大
CAS比较与替换,预期值与内存值比较,true就更新新值,false就不进行任何操作,这是个死循环,比较的过程会一直执行。自旋CAS如果长时间不成功,会给CPU带来非常大的执行开销。
如果JVM能支持处理器提供的pause指令那么效率会有一定的提升,pause指令有两个作用,第一它可以延迟流水线执行指令(de-pipeline),使CPU不会消耗过多的执行资源,延迟的时间取决于具体实现的版本,在一些处理器上延迟时间是零。第二它可以避免在退出循环的时候因内存顺序冲突(memory order violation)而引起CPU流水线被清空(CPU pipeline flush),从而提高CPU的执行效率。
3)只能保证一个共享变量的原子操作
当对一个共享变量执行操作时,我们可以使用循环CAS的方式来保证原子操作,但是对多个共享变量操作时,循环CAS就无法保证操作的原子性。
解决方案:这个时候就可以用锁,或者有一个取巧的办法,就是把多个共享变量合并成一个共享变量来操作。比如有两个共享变量i=2,j=a,合并一下ij=2a,然后用CAS来操作ij。从Java1.5开始JDK提供了AtomicReference类来保证引用对象之间的原子性,可以把多个变量放在一个对象里来进行CAS操作。
4)基于 CAS 的并发容器
ConcurrentHashMap:并发版 HashMap
CopyOnWriteArrayList:并发版 ArrayList
CopyOnWriteArraySet:并发 Set
ConcurrentLinkedQueue:并发队列 (基于链表)
ConcurrentLinkedDeque:并发队列 (基于双向链表)
ConcurrentSkipListMap:基于跳表的并发 Map
ConcurrentSkipListSet:基于跳表的并发 Set
Atomic(原子操作类)
atomic,原子操作类,是通过自旋CAS操作volatile变量实现的。在多线程环境下,i++操作是不安全的,J.U.C包下的atomic类提供了比synchronized关键字更好的选择。
CAS是compare and swap的缩写,即比较后(比较内存中的旧值与预期值)交换(将旧值替换成预期值)。它是sun.misc包下Unsafe类提供的功能,需要底层硬件指令集的支撑。
使用volatile变量是为了多个线程间变量的值能及时同步。
1)Atomic类的优点
Atomic类是cas乐观锁的实现,比synchroized更轻量,性能更好。
在JDK1.6之前,synchroized是重量级锁,即操作被锁的变量前就对对象加锁,不管此对象会不会产生资源竞争。这属于悲观锁的一种实现方式。而CAS会比较内存中对象和当前对象的值是否相同,相同的话才会更新内存中的值,不同的话便会返回失败。这是乐观锁的一中实现方式。这种方式就避免了直接使用内核状态的重量级锁。
但是在JDK1.6以后,synchronized进行了优化,引入了偏向锁,轻量级锁,其中也采用了CAS这种思想,效率有了很大的提升。
2)Atomic类的缺点
- ABA问题
- 因为CAS会检查旧值有没有变化,这里存在这样一个有意思的问题。比如一个旧值A变为了成B,然后再变成A,刚好在做CAS时检查发现旧值并没有变化依然为A,但是实际上的确发生了变化。解决方案可以沿袭数据库中常用的乐观锁方式,添加一个版本号可以解决。原来的变化路径A->B->A就变成了1A->2B->3C。
- 自旋时间过长
- 使用CAS时非阻塞同步,也就是说不会将线程挂起,会自旋(无非就是一个死循环)进行下一次尝试,如果这里自旋时间过长对性能是很大的消耗。如果JVM能支持处理器提供的pause指令,那么在效率上会有一定的提升。
十、了解Fork/Join框架吗?
Fork/Join框架是Java7提供的一个用于并行执行任务的框架,是一个把大任务分割成若干个小任务,最终汇总每个小任务结果后得到大任务结果的框架。
Fork/Join框架需要理解两个点,「分而治之」和「工作窃取算法」。
「分而治之」
以上Fork/Join框架的定义,就是分而治之思想的体现啦
「工作窃取算法」
把大任务拆分成小任务,放到不同队列执行,交由不同的线程分别执行时。有的线程优先把自己负责的任务执行完了,其他线程还在慢慢悠悠处理自己的任务,这时候为了充分提高效率,就需要工作盗窃算法啦~
工作盗窃算法就是,「某个线程从其他队列中窃取任务进行执行的过程」。一般就是指做得快的线程(盗窃线程)抢慢的线程的任务来做,同时为了减少锁竞争,通常使用双端队列,即快线程和慢线程各在一端。
十一、说说ThreadLocal原理?
ThreadLocal可以理解为线程本地变量,他会在每个线程都创建一个副本,那么在线程之间访问内部副本变量就行了,做到了线程之间互相隔离,相比于synchronized的做法是用空间来换时间。
ThreadLocal有一个静态内部类ThreadLocalMap,ThreadLocalMap又包含了一个Entry数组,Entry本身是一个弱引用,他的key是指向ThreadLocal的弱引用,Entry具备了保存key value键值对的能力。
弱引用的目的是为了防止内存泄露,如果是强引用那么ThreadLocal对象除非线程结束否则始终无法被回收,弱引用则会在下一次GC的时候被回收。
但是这样还是会存在内存泄露的问题,假如key和ThreadLocal对象被回收之后,entry中就存在key为null,但是value有值的entry对象,但是永远没办法被访问到,同样除非线程结束运行。
但是只要ThreadLocal使用恰当,在使用完之后调用remove方法删除Entry对象,实际上是不会出现这个问题的。

十二、LRU算法是怎么实现的?大致说明下
第一种方法:利用数组来实现
用一个数组来存储数据,给每一个数据项标记一个访问时间戳
每次插入新数据项的时候,先把数组中存在的数据项的时间戳自增,并将新数据项的时间戳置为0并插入到数组中
每次访问数组中的数据项的时候,将被访问的数据项的时间戳置为0。
当数组空间已满时,将时间戳最大的数据项淘汰。
第二种方法:利用链表来实现
每次新插入数据的时候将新数据插到链表的头部
每次缓存命中(即数据被访问),则将数据移到链表头部;
那么当链表满的时候,就将链表尾部的数据丢弃。
第三种方法:利用链表和hashmap来实现
当需要插入新的数据项的时候,如果新数据项在链表中存在(一般称为命中),则把该节点移到链表头部,如果不存在,则新建一个节点,放到链表头部,若缓存满了,则把链表最后一个节点删除即可。
在访问数据的时候,如果数据项在链表中存在,则把该节点移到链表头部,否则返回-1。这样一来在链表尾部的节点就是最近最久未访问的数据项。
对于第一种方法,需要不停地维护数据项的访问时间戳,另外,在插入数据、删除数据以及访问数据时,时间复杂度都是O(n)。对于第二种方法,链表在定位数据的时候时间复杂度为O(n)。所以在一般使用第三种方式来是实现LRU算法。
具体实现方案:使用LinkedHashMap实现
LinkedHashMap底层就是用的HashMap加双链表实现的,而且本身已经实现了按照访问顺序的存储。
此外,LinkedHashMap中本身就实现了一个方法removeEldestEntry用于判断是否需要移除最不常读取的数,方法默认是直接返回false,不会移除元素,所以需要重写该方法。即当缓存满后就移除最不常用的数。
public class LRU<K,V> {
private static final float hashLoadFactory = 0.75f;
private LinkedHashMap<K,V> map;
private int cacheSize;
public LRU(int cacheSize) {
this.cacheSize = cacheSize;
int capacity = (int)Math.ceil(cacheSize / hashLoadFactory) + 1;
map = new LinkedHashMap<K,V>(capacity, hashLoadFactory, true){
private static final long serialVersionUID = 1;
/*将LinkedHashMap中的removeEldestEntry进行重写改造*/
@Override
protected boolean removeEldestEntry(Map.Entry eldest) {
return size() > LRU.this.cacheSize;
}
};
}
public synchronized V get(K key) {
return map.get(key);
}
public synchronized void put(K key, V value) {
map.put(key, value);
}
public synchronized void clear() {
map.clear();
}
public synchronized int usedSize() {
return map.size();
}
public void print() {
for (Map.Entry<K, V> entry : map.entrySet()) {
System.out.print(entry.getValue() + "--");
}
System.out.println();
}
}
也可以自己手写一个:基于 HashMap 和 双向链表实现 LRU
整体的设计思路是:可以使用 HashMap 存储 key,这样可以做到 save 和 get key的时间都是 O(1),而 HashMap 的 Value 指向双向链表实现的 LRU 的 Node 节点,如图所示。

LRU 存储是基于双向链表实现的,下面的图演示了它的原理。其中 h 代表双向链表的表头,t 代表尾部。首先预先设置 LRU 的容量,如果存储满了,可以通过 O(1) 的时间淘汰掉双向链表的尾部,每次新增和访问数据,都可以通过 O(1)的效率把新的节点增加到对头,或者把已经存在的节点移动到队头。

定义基本结构:
class DLinkedNode {
String key;
int value;
DLinkedNode pre;
DLinkedNode post;
}
具体手写代码如下:
public class LRUCache {
private Hashtable<Integer, DLinkedNode> cache = new Hashtable<Integer, DLinkedNode>();
private int count;
private int capacity;
private DLinkedNode head, tail;
public LRUCache(int capacity) {
this.count = 0;
this.capacity = capacity;
head = new DLinkedNode();
head.pre = null;
tail = new DLinkedNode();
tail.post = null;
head.post = tail;
tail.pre = head;
}
public int get(String key) {
DLinkedNode node = cache.get(key);
if(node == null){
/**should raise exception here.*/
return -1;
}
// move the accessed node to the head;
this.moveToHead(node);
return node.value;
}
public void set(String key, int value) {
DLinkedNode node = cache.get(key);
if(node == null){
DLinkedNode newNode = new DLinkedNode();
newNode.key = key;
newNode.value = value;
this.cache.put(key, newNode);
this.addNode(newNode);
++count;
if(count > capacity){
// pop the tail
DLinkedNode tail = this.popTail();
this.cache.remove(tail.key);
--count;
}
}else{
// update the value.
node.value = value;
this.moveToHead(node);
}
}
/**
* Always add the new node right after head;
*/
private void addNode(DLinkedNode node){
node.pre = head;
node.post = head.post;
head.post.pre = node;
head.post = node;
}
/**
* Remove an existing node from the linked list.
*/
private void removeNode(DLinkedNode node){
DLinkedNode pre = node.pre;
DLinkedNode post = node.post;
pre.post = post;
post.pre = pre;
}
/**
* Move certain node in between to the head.
*/
private void moveToHead(DLinkedNode node){
this.removeNode(node);
this.addNode(node);
}
// pop the current tail.
private DLinkedNode popTail(){
DLinkedNode res = tail.pre;
this.removeNode(res);
return res;
}
}
sleep() 方法和 wait() 方法区别和共同点?
区别
sleep方法:是Thread类的静态方法,当前线程将睡眠n毫秒,线程进入阻塞状态。当睡眠时间到了,会解除阻塞,进入可运行状态,等待CPU的到来。睡眠不释放锁(如果有的话)。
wait方法:是Object的方法,必须与synchronized关键字一起使用,线程进入阻塞状态,当notify或者notifyall被调用后,会解除阻塞。但是,只有重新占用互斥锁之后才会进入可运行状态。睡眠时,会释放互斥锁。
sleep 方法没有释放锁,而 wait 方法释放了锁 。
sleep 通常被用于暂停执行Wait 通常被用于线程间交互/通信
sleep() 方法执行完成后,线程会自动苏醒。或者可以使用 wait(long timeout)超时后线程会自动苏醒。wait() 方法被调用后,线程不会自动苏醒,需要别的线程调用同一个对象上的 notify() 或者 notifyAll() 方法
相同
两者都可以暂停线程的执行。
JVM
一、Java内存区域
说一下 JVM 的主要组成部分及其作用?
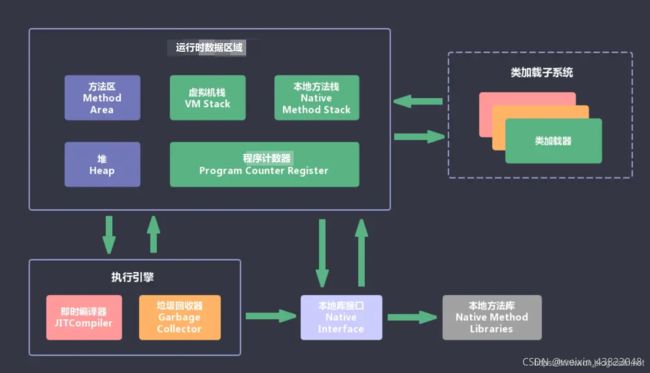
JVM包含两个子系统和两个组件,两个子系统为Class loader(类装载)、Execution engine(执行引擎);两个组件为Runtime data area(运行时数据区)、Native Interface(本地接口)。
-
Class loader(类装载):根据给定的全限定名类名(如:java.lang.Object)来装载class文件到Runtime data area中的method area。
-
Execution engine(执行引擎):执行classes中的指令。
-
Native Interface(本地接口):与native libraries交互,是其它编程语言交互的接口。
-
Runtime data area(运行时数据区域):这就是我们常说的JVM的内存。
作用 :首先通过编译器把 Java 代码转换成字节码,类加载器(ClassLoader)再把字节码加载到内存中,将其放在运行时数据区(Runtime data area)的方法区内,而字节码文件只是 JVM 的一套指令集规范,并不能直接交给底层操作系统去执行,因此需要特定的命令解析器执行引擎(Execution Engine),将字节码翻译成底层系统指令,再交由 CPU 去执行,而这个过程中需要调用其他语言的本地库接口(Native Interface)来实现整个程序的功能。
下面是Java程序运行机制详细说明
Java程序运行机制步骤
- 首先利用IDE集成开发工具编写Java源代码,源文件的后缀为.java;
- 再利用编译器(javac命令)将源代码编译成字节码文件,字节码文件的后缀名为.class;
- 运行字节码的工作是由解释器(java命令)来完成的。

从上图可以看,java文件通过编译器变成了.class文件,接下来类加载器又将这些.class文件加载到JVM中。
其实可以一句话来解释:类的加载指的是将类的.class文件中的二进制数据读入到内存中,将其放在运行时数据区的方法区内,然后在堆区创建一个 java.lang.Class对象,用来封装类在方法区内的数据结构。
二、运行时数据区
区域图
JDK8 之前的内存区域图如下:
JDK8 之后的内存区域图如下:
Java 8 中 PermGen 为什么被移出 HotSpot JVM 了?两个主要原因:
由于 PermGen 内存经常会溢出,引发恼人的 java.lang.OutOfMemoryError: PermGen,因此 JVM 的开发者希望这一块内存可以更灵活地被管理,不要再经常出现这样的 OOM
移除 PermGen 可以促进 HotSpot JVM 与 JRockit VM 的融合,因为 JRockit 没有永久代。
根据上面的各种原因,PermGen 最终被移除,方法区移至 Metaspace,字符串常量移至 Java Heap。
数据区功能
1)程序计数器
程序计数器(Program Counter Register)是一块较小的内存空间,它可以看作是当前线程所执行的字节码的行号指示器。
由于 Java 虚拟机的多线程是通过线程轮流切换并分配处理器执行时间的方式来实现的,在任何一个确定的时刻,一个处理器内核都只会执行一条线程中的指令。因此,为了线程切换后能恢复到正确的执行位置,每条线程都需要有一个独立的程序计数器,各条线程之间计数器互不影响,独立存储,我们称这类内存区域为“线程私有”的内存。
如果线程正在执行的是一个 Java 方法,这个计数器记录的是正在执行的虚拟机字节码指令的地址;
如果正在执行的是 Native 方法,这个计数器值则为空(Undefined)。
此内存区域是唯一一个在 Java 虚拟机规范中没有规定任何 OutOfMemoryError 情况的区域。
2)Java虚拟机栈
与程序计数器一样,Java 虚拟机栈(Java Virtual Machine Stacks)也是线程私有的,它的生命周期与线程相同。
虚拟机栈描述的是 Java 方法执行的内存模型:每个方法在执行的同时都会创建一个栈帧(Stack Frame,是方法运行时的基础数据结构)用于存储局部变量表、操作数栈、动态链接、方法出口等信息。每一个方法从调用直至执行完成的过程,就对应着一个栈帧在虚拟机栈中入栈到出栈的过程。
在活动线程中,只有位千栈顶的帧才是有效的,称为当前栈帧。正在执行的方法称为当前方法,栈帧是方法运行的基本结构。在执行引擎运行时,所有指令都只能针对当前栈帧进行操作。
- 局部变量表
局部变量表是存放方法参数和局部变量的区域。 局部变量没有准备阶段, 必须显式初始化。如果是非静态方法,则在 index[0] 位置上存储的是方法所属对象的实例引用,一个引用变量占 4 个字节,随后存储的是参数和局部变量。字节码指令中的 STORE 指令就是将操作栈中计算完成的局部变呈写回局部变量表的存储空间内。
虚拟机栈规定了两种异常状况:如果线程请求的栈深度大于虚拟机所允许的深度,将抛出 StackOverflowError 异常;如果虚拟机栈可以动态扩展(当前大部分的 Java 虚拟机都可动态扩展),如果扩展时无法申请到足够的内存,就会抛出 OutOfMemoryError 异常。
-
操作栈
操作栈是个初始状态为空的桶式结构栈。在方法执行过程中, 会有各种指令往栈中写入和提取信息。JVM 的执行引擎是基于栈的执行引擎, 其中的栈指的就是操作栈。字节码指令集的定义都是基于栈类型的,栈的深度在方法元信息的 stack 属性中。 -
动态链接
每个栈帧中包含一个在常量池中对当前方法的引用, 目的是支持方法调用过程的动态连接。 -
方法返回地址
方法执行时有两种退出情况:正常退出,即正常执行到任何方法的返回字节码指令,如 RETURN、IRETURN、ARETURN 等;异常退出。
无论何种退出情况,都将返回至方法当前被调用的位置。方法退出的过程相当于弹出当前栈帧,退出可能有三种方式:返回值压入上层调用栈帧/异常信息抛给能够处理的栈帧/PC计数器指向方法调用后的下一条指令。
3)本地方法栈
本地方法栈(Native Method Stack)与虚拟机栈所发挥的作用是非常相似的,它们之间的区别不过是虚拟机栈为虚拟机执行 Java 方法(也就是字节码)服务,而本地方法栈则为虚拟机使用到的 Native 方法服务。Sun HotSpot 虚拟机直接就把本地方法栈和虚拟机栈合二为一。与虚拟机栈一样,本地方法栈区域也会抛出 StackOverflowError 和 OutOfMemoryError 异常。
线程开始调用本地方法时,会进入 个不再受 JVM 约束的世界。本地方法可以通过 JNI(Java Native Interface)来访问虚拟机运行时的数据区,甚至可以调用寄存器,具有和 JVM 相同的能力和权限。 当大量本地方法出现时,势必会削弱 JVM 对系统的控制力,因为它的出错信息都比较黑盒。对内存不足的情况,本地方法栈还是会抛出 nativeheapOutOfMemory。
JNI 类本地方法最著名的应该是 System.currentTimeMillis() ,JNI使 Java 深度使用操作系统的特性功能,复用非 Java 代码。 但是在项目过程中, 如果大量使用其他语言来实现 JNI , 就会丧失跨平台特性。
4)Java堆
对于大多数应用来说,Java 堆(Java Heap)是 Java 虚拟机所管理的内存中最大的一块。Java 堆是被所有线程共享的一块内存区域,在虚拟机启动时创建。此内存区域的唯一目的就是存放对象实例,几乎所有的对象实例都在这里分配内存。
堆是垃圾收集器管理的主要区域,因此很多时候也被称做“GC堆”(Garbage Collected Heap)。从内存回收的角度来看,由于现在收集器基本都采用分代收集算法,所以 Java 堆中还可以细分为:新生代和老年代;再细致一点的有 Eden 空间、From Survivor 空间、To Survivor 空间等。从内存分配的角度来看,线程共享的 Java 堆中可能划分出多个线程私有的分配缓冲区(Thread Local Allocation Buffer,TLAB)。
Java 堆可以处于物理上不连续的内存空间中,只要逻辑上是连续的即可,当前主流的虚拟机都是按照可扩展来实现的(通过 -Xmx 和 -Xms 控制)。如果在堆中没有内存完成实例分配,并且堆也无法再扩展时,将会抛出 OutOfMemoryError 异常。
5)方法区
方法区(Method Area)与 Java 堆一样,是各个线程共享的内存区域,它用于存储已被虚拟机加载的类信息、常量、静态变量、即时编译器编译后的代码等数据。虽然Java 虚拟机规范把方法区描述为堆的一个逻辑部分,但是它却有一个别名叫做 Non-Heap(非堆),目的应该是与 Java 堆区分开来。
Java 虚拟机规范对方法区的限制非常宽松,除了和 Java 堆一样不需要连续的内存和可以选择固定大小或者可扩展外,还可以选择不实现垃圾收集。垃圾收集行为在这个区域是比较少出现的,其内存回收目标主要是针对常量池的回收和对类型的卸载。当方法区无法满足内存分配需求时,将抛出 OutOfMemoryError 异常。
JDK8 之前,Hotspot 中方法区的实现是永久代(Perm),JDK8 开始使用元空间(Metaspace),以前永久代所有内容的字符串常量移至堆内存,其他内容移至元空间,元空间直接在本地内存分配。
说一下堆栈的区别?
(1)申请方式
stack:由系统自动分配。例如,声明在函数中一个局部变量 int b; 系统自动在栈中为 b 开辟空间
heap:需要程序员自己申请,并指明大小,在 c 中 malloc 函数,对于Java 需要手动 new Object()的形式开辟
(2)申请后系统的响应
stack:只要栈的剩余空间大于所申请空间,系统将为程序提供内存,否则将报异常提示栈溢出。
heap:首先应该知道操作系统有一个记录空闲内存地址的链表,当系统收到程序的申请时,会遍历该链表,寻找第一个空间大于所申请空间的堆结点,然后将该结点从空闲结点链表中删除,并将该结点的空间分配给程序。另外,由于找到的堆结点的大小不一定正好等于申请的大小,系统会自动的将多余的那部分重新放入空闲链表中。
(3)申请大小的限制
stack:栈是向低地址扩展的数据结构,是一块连续的内存的区域。这句话的意思是栈顶的地址和栈的最大容量是系统预先规定好的,在 WINDOWS 下,栈的大小是 2M(默认值也取决于虚拟内存的大小),如果申请的空间超过栈的剩余空间时,将提示 overflow。因此,能从栈获得的空间较小。
heap:堆是向高地址扩展的数据结构,是不连续的内存区域。这是由于系统是用链表来存储的空闲内存地址的, 自然是不连续的,而链表的遍历方向是由低地址向高地址。堆的大小受限于计算机系统中有效的虚拟内存。由此可见, 堆获得的空间比较灵活,也比较大。
(4)申请效率的比较
stack:由系统自动分配,速度较快。但程序员是无法控制的。
heap:由 new 分配的内存,一般速度比较慢,而且容易产生内存碎片,不过用起来最方便。
(5)heap和stack中的存储内容
stack:在函数调用时,第一个进栈的是主函数中后的下一条指令(函数调用语句的下一条可执行语句)的地址, 然后是函数的各个参数,在大多数的 C 编译器中,参数是由右往左入栈的,然后是函数中的局部变量。注意静态变量是不入栈的。
当本次函数调用结束后,局部变量先出栈,然后是参数,最后栈顶指针指向最开始存的地址,也就是主函数中的下一条指令,程序由该点继续运行。
heap:一般是在堆的头部用一个字节存放堆的大小。堆中的具体内容有程序员安排。
什么情况下会发生栈内存溢出?
1、栈是线程私有的,栈的生命周期和线程一样,每个方法在执行的时候就会创建一个栈帧,它包含局部变量表、操作数栈、动态链接、方法出口等信息,局部变量表又包括基本数据类型和对象的引用; 2、当线程请求的栈深度超过了虚拟机允许的最大深度时,会抛出StackOverFlowError异常,方法递归调用肯可能会出现该问题; 3、调整参数-xss去调整jvm栈的大小
谈谈 JVM 中的常量池?
JVM常量池主要分为Class文件常量池、运行时常量池,全局字符串常量池,以及基本类型包装类对象常量池。
- Class文件常量池。class文件是一组以字节为单位的二进制数据流,在java代码的编译期间,我们编写的java文件就被编译为.class文件格式的二进制数据存放在磁盘中,其中就包括class文件常量池。
- 运行时常量池:运行时常量池相对于class常量池一大特征就是具有动态性,java规范并不要求常量只能在运行时才产生,也就是说运行时常量池的内容并不全部来自class常量池,在运行时可以通过代码生成常量并将其放入运行时常量池中,这种特性被用的最多的就是String.intern()。
- 全局字符串常量池:字符串常量池是JVM所维护的一个字符串实例的引用表,在HotSpot VM中,它是一个叫做StringTable的全局表。在字符串常量池中维护的是字符串实例的引用,底层C++实现就是一个Hashtable。这些被维护的引用所指的字符串实例,被称作”被驻留的字符串”或”interned string”或通常所说的”进入了字符串常量池的字符串”。
- 基本类型包装类对象常量池:java中基本类型的包装类的大部分都实现了常量池技术,这些类是Byte,Short,Integer,Long,Character,Boolean,另外两种浮点数类型的包装类则没有实现。另外上面这5种整型的包装类也只是在对应值小于等于127时才可使用对象池,也即对象不负责创建和管理大于127的这些类的对象。
为什么要使用元空间取代永久代的实现?
- 字符串存在永久代中,容易出现性能问题和内存溢出。
- 类及方法的信息等比较难确定其大小,因此对于永久代的大小指定比较困难,太小容易出现永久代溢出,太大则容易导致老年代溢出。
- 永久代会为 GC带来不必要的复杂度,并且回收效率偏低。
- 将 HotSpot 与 JRockit 合二为一。
简单介绍一下Java内存模型
Java内存模型是共享内存的并发模型,线程之间主要通过读-写共享变量(堆内存中的实例域,静态域和数组元素)来完成隐式通信。Java 内存模型(JMM)控制 Java 线程之间的通信,决定一个线程对共享变量的写入何时对另一个线程可见。
计算机高速缓存和缓存一致性
计算机在高速的 CPU 和相对低速的存储设备之间使用高速缓存,作为内存和处理器之间的缓冲。将运算需要使用到的数据复制到缓存中,让运算能快速运行,当运算结束后再从缓存同步回内存之中。
在多处理器的系统中(或者单处理器多核的系统),每个处理器内核都有自己的高速缓存,它们有共享同一主内存(Main Memory)。当多个处理器的运算任务都涉及同一块主内存区域时,将可能导致各自的缓存数据不一致。
为此,需要各个处理器访问缓存时都遵循一些协议,在读写时要根据协议进行操作,来维护缓存的一致性。

JVM主内存与工作内存
Java 内存模型的主要目标是定义程序中各个变量的访问规则,即在虚拟机中将变量(线程共享的变量)存储到内存和从内存中取出变量这样底层细节。
Java内存模型中规定了所有的变量都存储在主内存中,每条线程还有自己的工作内存,线程对变量的所有操作都必须在工作内存中进行,而不能直接读写主内存中的变量。这里的工作内存是 JMM 的一个抽象概念,也叫本地内存,其存储了该线程以读 / 写共享变量的副本。
就像每个处理器内核拥有私有的高速缓存,JMM 中每个线程拥有私有的本地内存。不同线程之间无法直接访问对方工作内存中的变量,线程间的通信一般有两种方式进行,一是通过消息传递,二是共享内存。Java 线程间的通信采用的是共享内存方式,线程、主内存和工作内存的交互关系如下图所示:

这里所讲的主内存、工作内存与 Java 内存区域中的 Java 堆、栈、方法区等并不是同一个层次的内存划分,这两者基本上是没有关系的,如果两者一定要勉强对应起来,那从变量、主内存、工作内存的定义来看,主内存主要对应于Java堆中的对象实例数据部分,而工作内存则对应于虚拟机栈中的部分区域。
重排序
在执行程序时为了提高性能,编译器和处理器常常会对指令做重排序。重排序分三种类型:
- 编译器优化的重排序。编译器在不改变单线程程序语义的前提下,可以重新安排语句的执行顺序。
- 指令级并行的重排序。现代处理器采用了指令级并行技术(Instruction-Level Parallelism, ILP)来将多条指令重叠执行。如果不存在数据依赖性,处理器可以改变语句对应机器指令的执行顺序。
- 内存系统的重排序。由于处理器使用缓存和读 / 写缓冲区,这使得加载和存储操作看上去可能是在乱序执行。
从 java 源代码到最终实际执行的指令序列,会分别经历下面三种重排序:

JMM 属于语言级的内存模型,它确保在不同的编译器和不同的处理器平台之上,通过禁止特定类型的编译器重排序和处理器重排序,为程序员提供一致的内存可见性保证。java 编译器禁止处理器重排序是通过在生成指令序列的适当位置会插入内存屏障(重排序时不能把后面的指令重排序到内存屏障之前的位置)指令来实现的。
happen-before规则
虽然指令重排提高了并发的性能,但是Java虚拟机会对指令重排做出一些规则限制,并不能让所有的指令都随意的改变执行位置,主要有以下几点:
- 单线程每个操作,happen-before于该线程中任意后续操作
- volatile写happen-before与后续对这个变量的读
- synchronized解锁happen-before后续对这个锁的加锁
- final变量的写happen-before于final域对象的读,happen-before后续对final变量的读
- 传递性规则,A先于B,B先于C,那么A一定先于C发生
volatile关键字
volatile 可以说是 JVM 提供的最轻量级的同步机制,当一个变量定义为volatile之后,它将具备两种特性:
- 保证此变量对所有线程的可见性。
而普通变量不能做到这一点,普通变量的值在线程间传递均需要通过主内存来完成。注意,volatile 虽然保证了可见性,但是 Java 里面的运算并非原子操作,导致 volatile 变量的运算在并发下一样是不安全的。而 synchronized 关键字则是由“一个变量在同一个时刻只允许一条线程对其进行 lock 操作”这条规则获得线程安全的。
- 禁止指令重排序优化。
普通的变量仅仅会保证在该方法的执行过程中所有依赖赋值结果的地方都能获取到正确的结果,而不能保证变量赋值操作的顺序与程序代码中的执行顺序一致。
三、对象创建过程
对象的创建
Header 解释
使用new关键字 调用了构造函数
使用Class的newInstance方法 调用了构造函数
使用Constructor类的newInstance方法 调用了构造函数
使用clone方法 没有调用构造函数
使用反序列化 没有调用构造函数
下面是对象创建的主要流程:

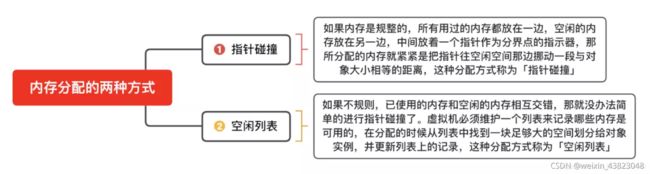
虚拟机遇到一条new指令时,先检查常量池是否已经加载相应的类,如果没有,必须先执行相应的类加载。类加载通过后,接下来分配内存。若Java堆中内存是绝对规整的,使用“指针碰撞“方式分配内存;如果不是规整的,就从空闲列表中分配,叫做”空闲列表“方式。划分内存时还需要考虑一个问题-并发,也有两种方式: CAS同步处理,或者本地线程分配缓冲(Thread Local Allocation Buffer, TLAB)。然后内存空间初始化操作,接着是做一些必要的对象设置(元信息、哈希码…),最后执行方法。
为对象分配内存
类加载完成后,接着会在Java堆中划分一块内存分配给对象。内存分配根据Java堆是否规整,有两种方式:
- 指针碰撞:如果Java堆的内存是规整,即所有用过的内存放在一边,而空闲的的放在另一边。分配内存时将位于中间的指针指示器向空闲的内存移动一段与对象大小相等的距离,这样便完成分配内存工作。
- 空闲列表:如果Java堆的内存不是规整的,则需要由虚拟机维护一个列表来记录那些内存是可用的,这样在分配的时候可以从列表中查询到足够大的内存分配给对象,并在分配后更新列表记录。
选择哪种分配方式是由 Java 堆是否规整来决定的,而 Java 堆是否规整又由所采用的垃圾收集器是否带有压缩整理功能决定。
处理并发安全问题
对象的创建在虚拟机中是一个非常频繁的行为,哪怕只是修改一个指针所指向的位置,在并发情况下也是不安全的,可能出现正在给对象 A 分配内存,指针还没来得及修改,对象 B 又同时使用了原来的指针来分配内存的情况。解决这个问题有两种方案:
对分配内存空间的动作进行同步处理(采用 CAS + 失败重试来保障更新操作的原子性);
把内存分配的动作按照线程划分在不同的空间之中进行,即每个线程在 Java 堆中预先分配一小块内存,称为本地线程分配缓冲(Thread Local Allocation Buffer, TLAB)。哪个线程要分配内存,就在哪个线程的 TLAB 上分配。只有 TLAB 用完并分配新的 TLAB 时,才需要同步锁。通过-XX:+/-UserTLAB参数来设定虚拟机是否使用TLAB。

还有一点需要注意的是,我们说TLAB是在eden区分配的,因为eden区域本身就不太大,而且TLAB空间的内存也非常小,默认情况下仅占有整个Eden空间的1%。所以,必然存在一些大对象是无法在TLAB直接分配。
遇到TLAB中无法分配的大对象,对象还是可能在eden区或者老年代等进行分配的,但是这种分配就需要进行同步控制,这也是为什么我们经常说:小的对象比大的对象分配起来更加高效。
TLAB带来的问题
虽然在一定程度上,TLAB大大的提升了对象的分配速度,但是TLAB并不是就没有任何问题的。
前面我们说过,因为TLAB内存区域并不是很大,所以,有可能会经常出现不够的情况。在《实战Java虚拟机》中有这样一个例子:
比如一个线程的TLAB空间有100KB,其中已经使用了80KB,当需要再分配一个30KB的对象时,就无法直接在TLAB中分配,遇到这种情况时,有两种处理方案:
-
1、如果一个对象需要的空间大小超过TLAB中剩余的空间大小,则直接在堆内存中对该对象进行内存分配。
-
2、如果一个对象需要的空间大小超过TLAB中剩余的空间大小,则废弃当前TLAB,重新申请TLAB空间再次进行内存分配。
以上两个方案各有利弊,如果采用方案1,那么就可能存在着一种极端情况,就是TLAB只剩下1KB,就会导致后续需要分配的大多数对象都需要在堆内存直接分配。
如果采用方案2,也有可能存在频繁废弃TLAB,频繁申请TLAB的情况,而我们知道,虽然在TLAB上分配内存是线程独享的,但是TLAB内存自己从堆中划分出来的过程确实可能存在冲突的,所以,TLAB的分配过程其实也是需要并发控制的。而频繁的TLAB分配就失去了使用TLAB的意义。
为了解决这两个方案存在的问题,虚拟机定义了一个refill_waste的值,这个值可以翻译为“最大浪费空间”。
当请求分配的内存大于refill_waste的时候,会选择在堆内存中分配。若小于refill_waste值,则会废弃当前TLAB,重新创建TLAB进行对象内存分配。
前面的例子中,TLAB总空间100KB,使用了80KB,剩余20KB,如果设置的refill_waste的值为25KB,那么如果新对象的内存大于25KB,则直接堆内存分配,如果小于25KB,则会废弃掉之前的那个TLAB,重新分配一个TLAB空间,给新对象分配内存。
对象的访问定位
Java程序需要通过 JVM 栈上的引用访问堆中的具体对象。对象的访问方式取决于 JVM 虚拟机的实现。目前主流的访问方式有 句柄 和 直接指针 两种方式。
-
指针: 指向对象,代表一个对象在内存中的起始地址。
-
句柄: 可以理解为指向指针的指针,维护着对象的指针。句柄不直接指向对象,而是指向对象的指针(句柄不发生变化,指向固定内存地址),再由对象的指针指向对象的真实内存地址。
句柄访问
Java堆中划分出一块内存来作为句柄池,引用中存储对象的句柄地址,而句柄中包含了对象实例数据与对象类型数据各自的具体地址信息,具体构造如下图所示:

优势:引用中存储的是稳定的句柄地址,在对象被移动(垃圾收集时移动对象是非常普遍的行为)时只会改变句柄中的实例数据指针,而引用本身不需要修改。
直接指针
如果使用直接指针访问,引用 中存储的直接就是对象地址,那么Java堆对象内部的布局中就必须考虑如何放置访问类型数据的相关信息。

优势:速度更快,节省了一次指针定位的时间开销。由于对象的访问在Java中非常频繁,因此这类开销积少成多后也是非常可观的执行成本。HotSpot 中采用的就是这种方式。
四、如何判断一个对象是否存活?
引用计数法
给对象添加一引用计数器,被引用一次计数器值就加 1;当引用失效时,计数器值就减 1;计数器为 0 时,对象就是不可能再被使用的,简单高效,缺点是无法解决对象之间相互循环引用的问题。
可达性分析算法
判断一个对象是否存活,分为两种算法1:引用计数法;2:可达性分析算法;
引用计数法: 给每一个对象设置一个引用计数器,当有一个地方引用该对象的时候,引用计数器就+1,引用失效时,引用计数器就-1;当引用计数器为0的时候,就说明这个对象没有被引用,也就是垃圾对象,等待回收; 缺点:无法解决循环引用的问题,当A引用B,B也引用A的时候,此时AB对象的引用都不为0,此时也就无法垃圾回收,所以一般主流虚拟机都不采用这个方法;
可达性分析法: 从一个被称为GC Roots的对象向下搜索,如果一个对象到GC Roots没有任何引用链相连接时,说明此对象不可用,在java中可以作为GC Roots的对象有以下几种:
- 虚拟机栈中引用的对象
- 方法区类静态属性引用的变量
- 方法区常量池引用的对象
- 本地方法栈JNI引用的对象
但一个对象满足上述条件的时候,不会马上被回收,还需要进行两次标记;第一次标记:判断当前对象是否有finalize()方法并且该方法没有被执行过,若不存在则标记为垃圾对象,等待回收;若有的话,则进行第二次标记;第二次标记将当前对象放入F-Queue队列,并生成一个finalize线程去执行该方法,虚拟机不保证该方法一定会被执行,这是因为如果线程执行缓慢或进入了死锁,会导致回收系统的崩溃;如果执行了finalize方法之后仍然没有与GC Roots有直接或者间接的引用,则该对象会被回收;
五、那引用类型有哪些?有什么区别?
引用类型主要分为强软弱虚四种:
- 强引用指的就是代码中普遍存在的赋值方式,比如A a = new A()这种。强引用关联的对象,永远不会被GC回收。
- 软引用可以用SoftReference来描述,指的是那些有用但是不是必须要的对象。系统在发生内存溢出前会对这类引用的对象进行回收。
- 弱引用可以用WeakReference来描述,他的强度比软引用更低一点,弱引用的对象下一次GC的时候一定会被回收,而不管内存是否足够。
- 虚引用也被称作幻影引用,是最弱的引用关系,可以用PhantomReference来描述,他必须和ReferenceQueue一起使用,同样的当发生GC的时候,虚引用也会被回收。可以用虚引用来管理堆外内存。
六、垃圾回收算法
一共有 4 种:标记-清除算法、复制算法、标记整理算法、分代收集算法
- 标记-清除算法
最基础的收集算法是“标记-清除”(Mark-Sweep)算法,分为“标记”和“清除”两个阶段:首先根据可达性算法标记出所有需要回收的对象,在标记完成后统一回收所有被标记的对象。
它的主要不足有两个:
效率问题,标记和清除两个过程的效率都不高;
空间问题,标记清除之后会产生大量不连续的内存碎片,空间碎片太多可能会导致以后在程序运行过程中需要分配较大对象时,无法找到足够的连续内存而不得不提前触发另一次垃圾收集动作。
- 复制算法
为了解决效率问题,一种称为“复制”(Copying)的收集算法出现了,它将可用内存按容量划分为大小相等的两块,每次只使用其中的一块。当这一块的内存用完了,就将还存活着的对象复制到另外一块上面,然后再把已使用过的内存空间一次清理掉。
这样使得每次都是对整个半区进行内存回收,内存分配时也就不用考虑内存碎片等复杂情况,只要移动堆顶指针,按顺序分配内存即可,实现简单,运行高效。只是这种算法的代价是将内存缩小为了原来的一半。
现在的商业虚拟机都采用这种算法来回收新生代,IBM 研究指出新生代中的对象 98% 是“朝生夕死”的,所以并不需要按照 1:1 的比例来划分内存空间,而是将内存分为一块较大的 Eden 空间和两块较小的 Survivor 空间,每次使用 Eden 和其中一块 Survivor 。
当回收时,将 Eden 和 Survivor 中还存活着的对象一次性地复制到另外一块 Survivor 空间上,最后清理掉 Eden 和刚才用过的 Survivor 空间。HotSpot 虚拟机默认 Eden:Survivor = 8:1,也就是每次新生代中可用内存空间为整个新生代容量的 90%(其中一块Survivor不可用),只有 10% 的内存会被“浪费”。
当然,98%的对象可回收只是一般场景下的数据,我们没有办法保证每次回收都只有不多于 10% 的对象存活,当 Survivor 空间不够用时,需要依赖其他内存(这里指老年代)进行分配担保(Handle Promotion)。内存的分配担保也一样,如果另外一块 Survivor 空间没有足够空间存放上一次新生代收集下来的存活对象时,这些对象将直接通过分配担保机制进入老年代。
-
标记-整理算法
根据老年代的特点,有人提出了另外一种“标记-整理”(Mark-Compact)算法,标记过程仍然与“标记-清除”算法一样,但后续步骤不是直接对可回收对象进行清理,而是让所有存活的对象都向一端移动,然后直接清理掉端边界以外的内存。 -
分代收集算法
分代收集算法根据对象存活周期的不同将堆分成新生代和老生代(Java8以前还有个永久代),默认比例为 1 : 2,新生代又分为 Eden 区, from Survivor 区(简称S0),to Survivor 区(简称 S1),三者的比例为 8: 1 : 1,这样就可以根据新老生代的特点选择最合适的垃圾回收算法,我们把新生代发生的 GC 称为 Young GC(也叫 Minor GC),老年代发生的 GC 称为 Old GC(也称为 Full GC)。
分代收集工作原理
1、对象在新生代的分配与回收
大部分对象在很短的时间内都会被回收,对象一般分配在 Eden 区,当 Eden 区将满时,触发 Minor GC
大部分对象在短时间内都会被回收, 所以经过 Minor GC 后只有少部分对象会存活,它们会被移到 S0 区(这就是为啥空间大小 Eden: S0: S1 = 8:1:1, Eden 区远大于 S0,S1 的原因,因为在 Eden 区触发的 Minor GC 把大部对象(接近98%)都回收了,只留下少量存活的对象,此时把它们移到 S0 或 S1 绰绰有余)同时对象年龄加一(对象的年龄即发生 Minor GC 的次数),最后把 Eden 区对象全部清理以释放出空间
当触发下一次 Minor GC 时,会把 Eden 区的存活对象和 S0(或S1) 中的存活对象(S0 或 S1 中的存活对象经过每次 Minor GC 都可能被回收)一起移到 S1(Eden 和 S0 的存活对象年龄+1), 同时清空 Eden 和 S0 的空间。
若再触发下一次 Minor GC,则重复上一步,只不过此时变成了 从 Eden,S1 区将存活对象复制到 S0 区,每次垃圾回收, S0, S1 角色互换,都是从 Eden ,S0(或S1) 将存活对象移动到 S1(或S0)。也就是说在 Eden 区的垃圾回收我们采用的是复制算法,因为在 Eden 区分配的对象大部分在 Minor GC 后都消亡了,只剩下极少部分存活对象(这也是为啥 Eden:S0:S1 默认为 8:1:1 的原因),S0,S1 区域也比较小,所以最大限度地降低了复制算法造成的对象频繁拷贝带来的开销。
对象何时晋升老年代
-
当对象的年龄达到了我们设定的阈值,则会从S0(或S1)晋升到老年代年龄阈值设置为 15, 当发生下一次 Minor GC 时,S0 中有个对象年龄达到 15,达到我们的设定阈值,晋升到老年代!
-
大对象 当某个对象分配需要大量的连续内存时,此时对象的创建不会分配在 Eden 区,会直接分配在老年代,因为如果把大对象分配在 Eden 区, Minor GC 后再移动到 S0,S1 会有很大的开销(对象比较大,复制会比较慢,也占空间),也很快会占满 S0,S1 区,所以干脆就直接移到老年代
-
还有一种情况也会让对象晋升到老年代,即在 S0(或S1) 区相同年龄的对象大小之和大于 S0(或S1)空间一半以上时,则年龄大于等于该年龄的对象也会晋升到老年代。
空间分配担保
如果YougGC时新生代有大量对象存活下来,而 survivor 区放不下了,这时必须转移到老年代中,但这时发现老年代也放不下这些对象了,那怎么处理呢?其实JVM有一个老年代空间分配担保机制来保证对象能够进入老年代。
在执行每次 YoungGC 之前,JVM会先检查老年代最大可用连续空间是否大于新生代所有对象的总大小。因为在极端情况下,可能新生代 YoungGC 后,所有对象都存活下来了,而 survivor 区又放不下,那可能所有对象都要进入老年代了。这个时候如果老年代的可用连续空间是大于新生代所有对象的总大小的,那就可以放心进行 YoungGC。但如果老年代的内存大小是小于新生代对象总大小的,那就有可能老年代空间不够放入新生代所有存活对象,这个时候JVM就会先检查 -XX:HandlePromotionFailure 参数是否允许担保失败,如果允许,就会判断老年代最大可用连续空间是否大于历次晋升到老年代对象的平均大小,如果大于,将尝试进行一次YoungGC,尽快这次YoungGC是有风险的。如果小于,或者 -XX:HandlePromotionFailure 参数不允许担保失败,这时就会进行一次 Full GC。
在允许担保失败并尝试进行YoungGC后,可能会出现三种情况:
- ① YoungGC后,存活对象小于survivor大小,此时存活对象进入survivor区中
- ② YoungGC后,存活对象大于survivor大小,但是小于老年大可用空间大小,此时直接进入老年代。
- ③ YoungGC后,存活对象大于survivor大小,也大于老年大可用空间大小,老年代也放不下这些对象了,此时就会发生“Handle Promotion Failure”,就触发了 Full GC。如果 Full GC后,老年代还是没有足够的空间,此时就会发生OOM内存溢出了。
通过下图来了解空间分配担保原则:
Stop The World
如果老年代满了,会触发 Full GC, Full GC 会同时回收新生代和老年代(即对整个堆进行GC),它会导致 Stop The World(简称 STW),造成挺大的性能开销。
什么是 STW ?所谓的 STW, 即在 GC(minor GC 或 Full GC)期间,只有垃圾回收器线程在工作,其他工作线程则被挂起。
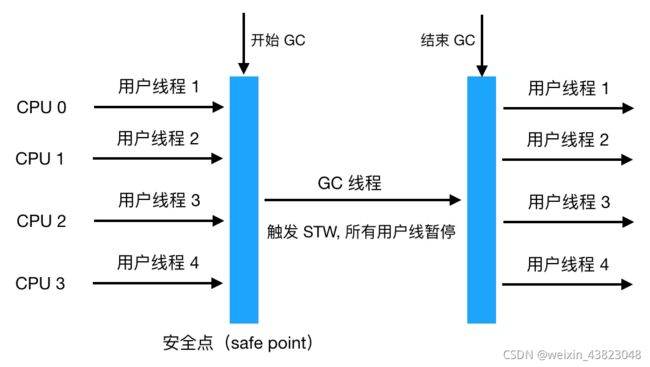
一般 Full GC 会导致工作线程停顿时间过长(因为Full GC 会清理整个堆中的不可用对象,一般要花较长的时间),如果在此 server 收到了很多请求,则会被拒绝服务!所以我们要尽量减少 Full GC(Minor GC 也会造成 STW,但只会触发轻微的 STW,因为 Eden 区的对象大部分都被回收了,只有极少数存活对象会通过复制算法转移到 S0 或 S1 区,所以相对还好)。
现在我们应该明白把新生代设置成 Eden, S0,S1区或者给对象设置年龄阈值或者默认把新生代与老年代的空间大小设置成 1:2 都是为了尽可能地避免对象过早地进入老年代,尽可能晚地触发 Full GC。想想新生代如果只设置 Eden 会发生什么,后果就是每经过一次 Minor GC,存活对象会过早地进入老年代,那么老年代很快就会装满,很快会触发 Full GC,而对象其实在经过两三次的 Minor GC 后大部分都会消亡,所以有了 S0,S1的缓冲,只有少数的对象会进入老年代,老年代大小也就不会这么快地增长,也就避免了过早地触发 Full GC。
由于 Full GC(或Minor GC) 会影响性能,所以我们要在一个合适的时间点发起 GC,这个时间点被称为 Safe Point,这个时间点的选定既不能太少以让 GC 时间太长导致程序过长时间卡顿,也不能过于频繁以至于过分增大运行时的负荷。一般当线程在这个时间点上状态是可以确定的,如确定 GC Root 的信息等,可以使 JVM 开始安全地 GC。Safe Point 主要指的是以下特定位置:
- 循环的末尾
- 方法返回前
- 调用方法的 call 之后
- 抛出异常的位置 另外需要注意的是由于新生代的特点(大部分对象经过 Minor GC后会消亡), Minor GC 用的是复制算法,而在老生代由于对象比较多,占用的空间较大,使用复制算法会有较大开销(复制算法在对象存活率较高时要进行多次复制操作,同时浪费一半空间)所以根据老生代特点,在老年代进行的 GC 一般采用的是标记整理法来进行回收。
七、垃圾收集器种类

- 在新生代工作的垃圾回收器:Serial, ParNew, ParallelScavenge
- 在老年代工作的垃圾回收器:CMS,Serial Old, Parallel Old
- 同时在新老生代工作的垃圾回收器:G1
图片中的垃圾收集器如果存在连线,则代表它们之间可以配合使用,接下来我们来看看各个垃圾收集器的具体功能。
新生代收集器
Serial 收集器
Serial 收集器是工作在新生代的,单线程的垃圾收集器,单线程意味着它只会使用一个 CPU 或一个收集线程来完成垃圾回收,不仅如此,还记得我们上文提到的 STW 了吗,它在进行垃圾收集时,其他用户线程会暂停,直到垃圾收集结束,也就是说在 GC 期间,此时的应用不可用。
看起来单线程垃圾收集器不太实用,不过我们需要知道的任何技术的使用都不能脱离场景,在 Client 模式下,它简单有效(与其他收集器的单线程比),对于限定单个 CPU 的环境来说,Serial 单线程模式无需与其他线程交互,减少了开销,专心做 GC 能将其单线程的优势发挥到极致,另外在用户的桌面应用场景,分配给虚拟机的内存一般不会很大,收集几十甚至一两百兆(仅是新生代的内存,桌面应用基本不会再大了),STW 时间可以控制在一百多毫秒内,只要不是频繁发生,这点停顿是可以接受的,所以对于运行在 Client 模式下的虚拟机,Serial 收集器是新生代的默认收集器
ParNew 收集器
ParNew 收集器是 Serial 收集器的多线程版本,除了使用多线程,其他像收集算法,STW,对象分配规则,回收策略与 Serial 收集器完成一样
ParNew 主要工作在 Server 模式,我们知道服务端如果接收的请求多了,响应时间就很重要了,多线程可以让垃圾回收得更快,也就是减少了 STW 时间,能提升响应时间,所以是许多运行在 Server 模式下的虚拟机的首选新生代收集器,另一个与性能无关的原因是因为除了 Serial 收集器,只有它能与 CMS 收集器配合工作,CMS 是一个划时代的垃圾收集器,是真正意义上的并发收集器,它第一次实现了垃圾收集线程与用户线程(基本上)同时工作,它采用的是传统的 GC 收集器代码框架,与 Serial,ParNew 共用一套代码框架,所以能与这两者一起配合工作,而后文提到的 Parallel Scavenge 与 G1 收集器没有使用传统的 GC 收集器代码框架,而是另起炉灶独立实现的,另外一些收集器则只是共用了部分的框架代码,所以无法与 CMS 收集器一起配合工作。
在多 CPU 的情况下,由于 ParNew 的多线程回收特性,毫无疑问垃圾收集会更快,也能有效地减少 STW 的时间,提升应用的响应速度。
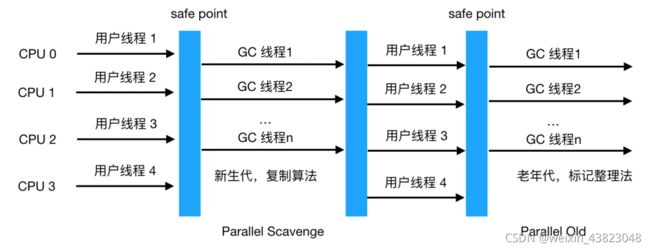
Parallel Scavenge 收集器
Parallel Scavenge 收集器也是一个使用复制算法,多线程,工作于新生代的垃圾收集器,看起来功能和 ParNew 收集器一样,它有啥特别之处吗
关注点不同,CMS 等垃圾收集器关注的是尽可能缩短垃圾收集时用户线程的停顿时间,而 Parallel Scavenge 目标是达到一个可控制的吞吐量(吞吐量 = 运行用户代码时间 / (运行用户代码时间+垃圾收集时间)),也就是说 CMS 等垃圾收集器更适合用到与用户交互的程序,因为停顿时间越短,用户体验越好,而 Parallel Scavenge 收集器关注的是吞吐量,所以更适合做后台运算等不需要太多用户交互的任务。
Parallel Scavenge 收集器提供了两个参数来精确控制吞吐量,分别是控制最大垃圾收集时间的 -XX:MaxGCPauseMillis 参数及直接设置吞吐量大小的 -XX:GCTimeRatio(默认99%)
除了以上两个参数,还可以用 Parallel Scavenge 收集器提供的第三个参数 -XX:UseAdaptiveSizePolicy,开启这个参数后,就不需要手工指定新生代大小,Eden 与 Survivor 比例(SurvivorRatio)等细节,只需要设置好基本的堆大小(-Xmx 设置最大堆),以及最大垃圾收集时间与吞吐量大小,虚拟机就会根据当前系统运行情况收集监控信息,动态调整这些参数以尽可能地达到我们设定的最大垃圾收集时间或吞吐量大小这两个指标。自适应策略也是 Parallel Scavenge 与 ParNew 的重要区别!
老年代收集器
Serial Old 收集器
上文我们知道, Serial 收集器是工作于新生代的单线程收集器,与之相对地,Serial Old 是工作于老年代的单线程收集器,此收集器的主要意义在于给 Client 模式下的虚拟机使用,如果在 Server 模式下,则它还有两大用途:一种是在 JDK 1.5 及之前的版本中与 Parallel Scavenge 配合使用,另一种是作为 CMS 收集器的后备预案,在并发收集发生 Concurrent Mode Failure 时使用(后文讲述),它与 Serial 收集器配合使用示意图如下

Parallel Old 收集器
Parallel Old 是相对于 Parallel Scavenge 收集器的老年代版本,使用多线程和标记整理法,两者组合示意图如下,这两者的组合由于都是多线程收集器,真正实现了「吞吐量优先」的目标
CMS收集器
CMS(Concurrent Mark Sweep)收集器是一种以获取最短回收停顿时间为目标的收集器。目前很大一部分的 Java 应用集中在互联网站或者 B/S 系统的服务端上,这类应用尤其重视服务的响应速度,希望系统停顿时间最短,以给用户带来较好的体验。CMS 收集器就非常符合这类应用的需求。从名字(包含"Mark Sweep")上就可以看出,CMS 收集器是基于“标记—清除”算法实现的,它的运作过程相对于前面几种收集器来说更复杂一些,整个过程分为4个步骤,包括:
初始标记(CMS initial mark)
并发标记(CMS concurrent mark)
重新标记(CMS remark)
并发清除(CMS concurrent sweep)
其中,初始标记、重新标记这两个步骤仍然需要"Stop The World"。初始标记仅仅只是标记一下 GC Roots 能直接关联到的对象,速度很快,并发标记阶段就是进行 GC RootsTracing 的过程,而重新标记阶段则是为了修正并发标记期间因用户程序继续运作而导致标记产生变动的那一部分对象的标记记录,这个阶段的停顿时间一般会比初始标记阶段稍长一些,但远比并发标记的时间短。

CMS 是一款优秀的收集器,它的主要优点在名字上已经体现出来了:并发收集、低停顿,但是 CMS 还远达不到完美的程度,它有以下 3 个明显的缺点:
-
第一、导致吞吐量降低。
CMS 收集器对 CPU 资源非常敏感。其实,面向并发设计的程序都对 CPU 资源比较敏感。在并发阶段,它虽然不会导致用户线程停顿,但是会因为占用了一部分线程(或者说CPU资源)而导致应用程序变慢,总吞吐量会降低。CMS 默认启动的回收线程数是(CPU数量+3)/4,也就是当 CPU 在4个以上时,并发回收时垃圾收集线程不少于 25% 的 CPU 资源,并且随着 CPU 数量的增加而下降。但是当 CPU 不足 4 个(譬如2个)时,CMS 对用户程序的影响就可能变得很大,如果本来 CPU 负载就比较大,还分出一半的运算能力去执行收集器线程,就可能导致用户程序的执行速度忽然降低了 50%,其实也让人无法接受。 -
第二、CMS 收集器无法处理浮动垃圾(Floating Garbage),可能出现"Concurrent Mode Failure"失败而导致另一次 Full GC(新生代和老年代同时回收) 的产生。
由于 CMS 并发清理阶段用户线程还在运行着,伴随程序运行自然就还会有新的垃圾不断产生,这一部分垃圾出现在标记过程之后,CMS 无法在当次收集中处理掉它们,只好留待下一次 GC 时再清理掉。这一部分垃圾就称为“浮动垃圾”。也是由于在垃圾收集阶段用户线程还需要运行,那也就还需要预留有足够的内存空间给用户线程使用,因此 CMS 收集器不能像其他收集器那样等到老年代几乎完全被填满了再进行收集,需要预留一部分空间提供并发收集时的程序运作使用。
要是 CMS 运行期间预留的内存无法满足程序需要,就会出现一次"Concurrent Mode Failure"失败,这时虚拟机将启动后备预案:临时启用 Serial Old 收集器来重新进行老年代的垃圾收集,这样停顿时间就很长了。所以说参数-XX:CM SInitiatingOccupancyFraction设置得太高很容易导致大量"Concurrent Mode Failure"失败,性能反而降低。
- 第三、产生空间碎片。
CMS 是一款基于“标记—清除”算法实现的收集器,这意味着收集结束时会有大量空间碎片产生。空间碎片过多时,将会给大对象分配带来很大麻烦,往往会出现老年代还有很大空间剩余,但是无法找到足够大的连续空间来分配当前对象,不得不提前触发一次 Full GC 。
为了解决这个问题,CMS 收集器提供了一个-XX:+UseCMSCompactAtFullCollection开关参数(默认就是开启的),用于在CMS收集器顶不住要进行 FullGC 时开启内存碎片的合并整理过程,内存整理的过程是无法并发的,空间碎片问题没有了,但停顿时间不得不变长。虚拟机设计者还提供了另外一个参数-XX:CMSFullGCsBeforeCompaction,这个参数是用于设置执行多少次不压缩的 Full GC 后,跟着来一次带压缩的(默认值为0,表示每次进入Full GC时都进行碎片整理)。
G1收集器
G1(Garbage-First)收集器是当今收集器技术发展的最前沿成果之一,G1 是一款面向服务端应用的垃圾收集器。HotSpot 开发团队赋予它的使命是(在比较长期的)未来可以替换掉 JDK 1.5 中发布的 CMS 收集器。

与其他 GC 收集器相比,G1 具备如下特点:
- 并行与并发: G1 能充分利用多 CPU、多核环境下的硬件优势,使用多个CPU(CPU或者CPU核心)来缩短 Stop-The-World 停顿的时间,部分其他收集器原本需要停顿 Java 线程执行的 GC 动作,G1 收集器仍然可以通过并发的方式让 Java 程序继续执行。
- 分代收集: 与其他收集器一样,分代概念在 G1 中依然得以保留。虽然 G1 可以不需要其他收集器配合就能独立管理整个 GC 堆,但它能够采用不同的方式去处理新创建的对象和已经存活了一段时间、熬过多次 GC 的旧对象以获取更好的收集效果。
- 空间整合: 与 CMS 的“标记—清理”算法不同,G1 从整体来看是基于“标记—整理”算法实现的收集器,从局部(两个 Region 之间)上来看是基于“复制”算法实现的,但无论如何,这两种算法都意味着 G1 运作期间不会产生内存空间碎片,收集后能提供规整的可用内存。这种特性有利于程序长时间运行,分配大对象时不会因为无法找到连续内存空间而提前触发下一次 GC 。
- 可预测的停顿: 这是 G1 相对于 CMS 的另一大优势,降低停顿时间是 G1 和 CMS 共同的关注点,但 G1 除了追求低停顿外,还能建立可预测的停顿时间模型,能让使用者明确指定在一个长度为M毫秒的时间片段内,消耗在垃圾收集上的时间不得超过N毫秒,这几乎已经是实时 Java(RTSJ)的垃圾收集器的特征了。
在 G1 之前的其他收集器进行收集的范围都是整个新生代或者老年代,而 G1 不再是这样。使用 G1 收集器时,Java 堆的内存布局就与其他收集器有很大差别,它将整个 Java 堆划分为多个大小相等的独立区域(Region),虽然还保留有新生代和老年代的概念,但新生代和老年代不再是物理隔离的了,它们都是一部分 Region (不需要连续)的集合。
G1 收集器之所以能建立可预测的停顿时间模型,是因为它可以有计划地避免在整个Java堆中进行全区域的垃圾收集。G1 在后台维护一个优先列表,每次根据允许的收集时间,优先回收价值最大的 Region(这也就是Garbage-First名称的来由),保证了 G1 收集器在有限的时间内可以获取尽可能高的收集效率。
在 G1 收集器中,Region 之间的对象引用以及其他收集器中的新生代与老年代之间的对象引用,虚拟机都是使用 Remembered Set 来避免全堆扫描的。
G1 中每个Region 都有一个与之对应的 Remembered Set,虚拟机发现程序在对 Reference 类型的数据进行写操作时,会产生一个 Write Barrier 暂时中断写操作,检查 Reference 引用的对象是否处于不同的 Region 之中(在分代的例子中就是检查是否老年代中的对象引用了新生代中的对象),如果是,便通过 CardTable 把相关引用信息记录到被引用对象所属的 Region 的 Remembered Set 之中。当进行内存回收时,在 GC 根节点的枚举范围中加入 Remembered Set 即可保证不对全堆扫描也不会有遗漏。
如果不计算维护 Remembered Set 的操作,G1 收集器的运作大致可划分为以下几个步骤:
初始标记(Initial Marking)
并发标记(Concurrent Marking)
最终标记(Final Marking)
筛选回收(Live Data Counting and Evacuation)
G1 的前几个步骤的运作过程和 CMS 有很多相似之处:
- 初始标记阶段仅仅只是标记一下 GC Roots 能直接关联到的对象,并且修改 TAMS(Next Top at Mark Start)的值,让下一阶段用户程序并发运行时,能在正确可用的 Region 中创建新对象,这阶段需要停顿线程,但耗时很短。
- 并发标记阶段是从 GC Root 开始对堆中对象进行可达性分析,找出存活的对象,这阶段耗时较长,但可与用户程序并发执行。
- 最终标记阶段则是为了修正在并发标记期间因用户程序继续运作而导致标记产生变动的那一部分标记记录,虚拟机将这段时间对象变化记录在线程 Remembered Set Logs 里面,最终标记阶段需要把 Remembered Set Logs 的数据合并到 Remembered Set 中,这阶段需要停顿线程,但是可并行执行。
- 最后在筛选回收阶段首先对各个 Region 的回收价值和成本进行排序,根据用户所期望的 GC 停顿时间来制定回收计划,从Sun公司透露出来的信息来看,这个阶段其实也可以做到与用户程序一起并发执行,但是因为只回收一部分 Region,时间是用户可控制的,而且停顿用户线程将大幅提高收集效率。
G1和CMS的比较
- CMS收集器是获取最短回收停顿时间为目标的收集器,因为CMS工作时,GC工作线程与用户线程可以并发执行,以此来达到降低停顿时间的目的(只有初始标记和重新标记会STW)。但是CMS收集器对CPU资源非常敏感。在并发阶段,虽然不会导致用户线程停顿,但是会占用CPU资源而导致引用程序变慢,总吞吐量下降。
- CMS仅作用于老年代,是基于标记清除算法,所以清理的过程中会有大量的空间碎片。
- CMS收集器无法处理浮动垃圾,由于CMS并发清理阶段用户线程还在运行,伴随程序的运行自热会有新的垃圾不断产生,这一部分垃圾出现在标记过程之后,CMS无法在本次收集中处理它们,只好留待下一次GC时将其清理掉。
- G1是一款面向服务端应用的垃圾收集器,适用于多核处理器、大内存容量的服务端系统。G1能充分利用CPU、多核环境下的硬件优势,使用多个CPU(CPU或者CPU核心)来缩短STW的停顿时间,它满足短时间停顿的同时达到一个高的吞吐量。
- 从JDK 9开始,G1成为默认的垃圾回收器。当应用有以下任何一种特性时非常适合用G1:Full GC持续时间太长或者太频繁;对象的创建速率和存活率变动很大;应用不希望停顿时间长(长于0.5s甚至1s)。
- G1将空间划分成很多块(Region),然后他们各自进行回收。堆比较大的时候可以采用复制算法,碎片化问题不严重。整体上看属于标记整理算法,局部(region之间)属于复制算法。
- G1 需要记忆集 (具体来说是卡表)来记录新生代和老年代之间的引用关系,这种数据结构在 G1 中需要占用大量的内存,可能达到整个堆内存容量的 20% 甚至更多。而且 G1 中维护记忆集的成本较高,带来了更高的执行负载,影响效率。所以 CMS 在小内存应用上的表现要优于 G1,而大内存应用上 G1 更有优势,大小内存的界限是6GB到8GB。
CMS垃圾回收器存在的问题及解决方案
CMS是使用标记-清理算法去垃圾回收的。其中四个主要的流程分别是初始标记、并发标记、重新标记、并发清理。
- 并发消耗CPU资源
其中的并发标记和并发清理是工作线程和垃圾回收线程并发工作,这样在需要STW的时间内不会让整个系统不可用。但是在并发标记阶段,需要根据GC Roots标记出大量的存活对象,而在并发清理阶段,则需要将垃圾对象从各种随机内存位置删掉,这两个阶段都非常消耗性能,所以垃圾回收线程会占用一部分的CPU资源,导致系统的执行效率降低。
CMS默认的回收线程数是 (CPU个数+3)/4,当在CPU核数较多的时候,对系统性能的影响并不是特别大。但是如果是CPU核数较少,例如双核的时候,就会占用一个CPU去处理垃圾回收,系统的CPU资源直接降低50%,这就严重影响了效率。
因为现在CPU的核数越来越多,所以这种场景基本不会对系统造成很大的影响,可以忽略不计。
- Concurrent Mode Failure问题
并发清理阶段,工作线程和垃圾回收线程并发工作的时候,此时工作线程会不断产生新的垃圾,但是垃圾回收线程并不会去处理这些新生成的垃圾对象,需要等到下次垃圾回收的时候才会去处理,这些垃圾对象称之为:浮动垃圾 。因为有这些浮动垃圾的存在,所以老年代不能在100%使用的时候才去进行垃圾回收,否则就放不下这些浮动垃圾了。
有一个参数是“-XX:CMSInitiatingOccupancyFraction”,这个参数在jdk1.6里面默认是92%,意思是老年代使用了92%的空间就会执行垃圾回收了。但是即使预留了8%的内存去存放浮动垃圾,但是还是有可能放不下,这样就会产生Concurrent Mode Failure问题。一旦产生了Concurrent Mode Failure问题,系统会直接使用Serial Old垃圾回收器取代CMS垃圾回收器,从头开始进行GC Roots追踪对象,并清理垃圾,这样会导致整个垃圾回收的时间变得更长。
解决办法就是根据系统的需求,合理设置“-XX:CMSInitiatingOccupancyFraction”的值,如果过大,则会产生Concurrent Mode Failure问题,如果设置的过小,则会导致老年代更加频繁的垃圾回收。
- 空间碎片问题
CMS的标记-清理算法会在并发清理的阶段产生大量的内存碎片,如果不整理的话,则会有大量不连续的内存空间存在,无法放入一些进入老年代的大对象,导致老年代频繁垃圾回收。所以CMS存在一个默认的参数 “-XX:+UseCMSCompactAtFullCollection”,意思是在Full GC之后再次STW,停止工作线程,整理内存空间,将存活的对象移到一边。还要一个参数是“-XX:+CMSFullGCsBeforeCompaction”,表示在进行多少次Full GC之后进行内存碎片整理,默认为0,即每次Full GC之后都进行内存碎片整理。
CMS虽然使用并发的方式降低了STW的时间,但是还需要配合一些CMS的参数才能完全发挥出CMS的优势,否则甚至会降低垃圾回收的效率。因此只有掌握了CMS的原理和参数的调试,才能让系统运行的更加流畅。
Minor GC和Full GC触发条件
Minor GC触发条件:
当Eden区满时,触发Minor GC。
Full GC触发条件:
- 通过Minor GC后进入老年代的平均大小大于老年代的可用内存。如果发现统计数据说之前Minor GC的平均晋升大小比目前old gen剩余的空间大,则不会触发Minor GC而是转为触发full GC。
- 老年代空间不够分配新的内存(或永久代空间不足,但只是JDK1.7有的,这也是用元空间来取代永久代的原因,可以减少Full GC的频率,减少GC负担,提升其效率)。
- 由Eden区、From Space区向To Space区复制时,对象大小大于To Space可用内存,则把该对象转存到老年代,且老年代的可用内存小于该对象大小。
- 调用System.gc时,系统建议执行Full GC,但是不必然执行。
Minor GC 和 Full GC 有什么不一样吗?
新生代 GC(Minor GC):指发生在新生代的垃圾收集动作,因为 Java 对象大多都具备朝生夕灭的特性,所以Minor GC 非常频繁,一般回收速度也比较快。
老年代 GC(Major GC/Full GC):指发生在老年代的 GC,出现了 Major GC,经常会伴随至少一次的 Minor GC(但非绝对的,在 Parallel Scavenge 收集器的收集策略里就有直接进行 Major GC 的策略选择过程)。Major GC 的速度一般会比 Minor GC 慢 10 倍以上。
八、类加载机制
类加载分为三个步骤:加载、连接(验证、准备、解析)、初始化。
加载
类加载过程的第一步,主要完成下面3件事情:
-
通过全类名获取定义此类的二进制字节流
-
将字节流所代表的静态存储结构转换为方法区的运行时数据结构
-
在内存中生成一个代表该类的 Class 对象,作为方法区这些数据的访问入口
虚拟机规范多上面这3点并不具体,因此是非常灵活的。比如:“通过全类名获取定义此类的二进制字节流” 并没有指明具体从哪里获取、怎样获取。比如:比较常见的就是从 ZIP 包中读取(日后出现的JAR、EAR、WAR格式的基础)、其他文件生成(典型应用就是JSP)等等。
一个非数组类的加载阶段(加载阶段获取类的二进制字节流的动作)是可控性最强的阶段,这一步我们可以去完成还可以自定义类加载器去控制字节流的获取方式(重写一个类加载器的 loadClass() 方法)。数组类型不通过类加载器创建,它由 Java 虚拟机直接创建。
类加载器、双亲委派模型也是非常重要的知识点,这部分内容会在后面的文章中单独介绍到。
加载阶段和连接阶段的部分内容是交叉进行的,加载阶段尚未结束,连接阶段可能就已经开始了。
验证

准备
准备阶段是正式为类变量分配内存并设置类变量初始值的阶段,这些内存都将在方法区中分配。对于该阶段有以下几点需要注意:
这时候进行内存分配的仅包括类变量(static),而不包括实例变量,实例变量会在对象实例化时随着对象一块分配在 Java 堆中。
这里所设置的初始值"通常情况"下是数据类型默认的零值(如0、0L、null、false等),比如我们定义了public static int value=111 ,那么 value 变量在准备阶段的初始值就是 0 而不是111(初始化阶段才会复制)。特殊情况:比如给 value 变量加上了 fianl 关键字public static final int value=111 ,那么准备阶段 value 的值就被复制为 111。
基本数据类型的零值:

解析
解析阶段是虚拟机将常量池内的符号引用替换为直接引用的过程。解析动作主要针对类或接口、字段、类方法、接口方法、方法类型、方法句柄和调用限定符7类符号引用进行。
符号引用就是一组符号来描述目标,可以是任何字面量。直接引用就是直接指向目标的指针、相对偏移量或一个间接定位到目标的句柄。在程序实际运行时,只有符号引用是不够的,举个例子:在程序执行方法时,系统需要明确知道这个方法所在的位置。Java 虚拟机为每个类都准备了一张方法表来存放类中所有的方法。当需要调用一个类的方法的时候,只要知道这个方法在方发表中的偏移量就可以直接调用该方法了。通过解析操作符号引用就可以直接转变为目标方法在类中方法表的位置,从而使得方法可以被调用。
综上,解析阶段是虚拟机将常量池内的符号引用替换为直接引用的过程,也就是得到类或者字段、方法在内存中的指针或者偏移量。
初始化
初始化是类加载的最后一步,也是真正执行类中定义的 Java 程序代码(字节码),初始化阶段是执行类构造器 ()方法的过程。
对于() 方法的调用,虚拟机会自己确保其在多线程环境中的安全性。因为 () 方法是带锁线程安全,所以在多线程环境下进行类初始化的话可能会引起死锁,并且这种死锁很难被发现。
对于初始化阶段,虚拟机严格规范了有且只有5中情况下,必须对类进行初始化:
当遇到 new 、 getstatic、putstatic或invokestatic 这4条直接码指令时,比如 new 一个类,读取一个静态字段(未被 final 修饰)、或调用一个类的静态方法时。
使用 java.lang.reflect 包的方法对类进行反射调用时 ,如果类没初始化,需要触发其初始化。
初始化一个类,如果其父类还未初始化,则先触发该父类的初始化。
当虚拟机启动时,用户需要定义一个要执行的主类 (包含 main 方法的那个类),虚拟机会先初始化这个类。
当使用 JDK1.7 的动态动态语言时,如果一个 MethodHandle 实例的最后解析结构为 REF_getStatic、REF_putStatic、REF_invokeStatic、的方法句柄,并且这个句柄没有初始化,则需要先触发器初始化。
什么时候需要对类进行初始化?
- 使用new该类实例化对象的时候;
- 读取或设置类静态字段的时候(但被final修饰的字段,在编译器时就被放入常量池的静态字段除外static final);
- 调用类静态方法的时候;
- 使用反射Class.forName(“xxxx”)对类进行反射调用的时候,该类需要初始化;
- 初始化一个类的时候,有父类,先初始化父类(注:1. 接口除外,父接口在调用的时候才会被初始化;2.子类引用父类静态字段,只会引发父类初始化);
- 被标明为启动类的类(即包含main()方法的类)要初始化;
- 当使用JDK1.7的动态语言支持时,如果一个java.invoke.MethodHandle实例最后的解析结果REF_getStatic、REF_putStatic、REF_invokeStatic的方法句柄,并且这
个方法句柄所对应的类没有进行过初始化,则需要先触发其初始化。
九、类加载器和双亲委派模型
类加载器是指:通过一个类的全限定性类名获取该类的二进制字节流叫做类加载器;类加载器分为以下四种:
-
启动类加载器(BootStrapClassLoader):用来加载java核心类库,无法被java程序直接引用;
-
扩展类加载器(Extension ClassLoader):用来加载java的扩展库,java的虚拟机实现会提供一个扩展库目录,该类加载器在扩展库目录里面查找并加载java类;
-
系统类加载器(AppClassLoader):它根据java的类路径来加载类,一般来说,java应用的类都是通过它来加载的;
-
自定义类加载器:由java语言实现,继承自ClassLoader;
什么是双亲委派模型?为什么需要双亲委派模型?
当一个类加载器收到一个类加载的请求,他首先不会尝试自己去加载,而是将这个请求委派给父类加载器去加载,只有父类加载器在自己的搜索范围类查找不到给类时,子加载器才会尝试自己去加载该类;
为了防止内存中出现多个相同的字节码;因为如果没有双亲委派的话,用户就可以自己定义一个java.lang.String类,那么就无法保证类的唯一性。
那怎么打破双亲委派模型?
自定义类加载器,继承ClassLoader类,重写loadClass方法和findClass方法。
十、相关JVM的调优参数有哪些?
- -Xmx:指定java程序的最大堆内存, 使用java -Xmx5000M -version判断当前系统能分配的最大堆内存
- -Xms:指定最小堆内存, 通常设置成跟最大堆内存一样,减少GC
- -Xmn:设置年轻代大小。整个堆大小=年轻代大小 + 年老代大小。所以增大年轻代后,将会减小年老代大小。此值对系统性能影响较大,Sun官方推荐配置为整个堆的3/8。
- -Xss:指定线程的最大栈空间,此参数决定了java函数调用的深度,,值越大调用深度越深,,若值太小则容易出栈溢出错误(StackOverflowError)
- -XX:PermSize:指定方法区(永久区)的初始值,默认是物理内存的1/64, 在Java8永久区移除, 代之的是元数据区, 由-XX:MetaspaceSize指定
- -XX:MaxPermSize:指定方法区的最大值, 默认是物理内存的1/4, 在java8中由-XX:MaxMetaspaceSize指定元数据区的大小
- -XX:NewRatio=n:年老代与年轻代的比值,-XX:NewRatio=2, 表示年老代与年轻代的比值为2:1
- -XX:SurvivorRatio=n:Eden区与Survivor区的大小比值,-XX:SurvivorRatio=8表示Eden区与Survivor区的大小比值是8:1:1,因为Survivor区有两个(from, to)
说一下 JVM 调优的命令?
- jps:JVM Process Status Tool,显示指定系统内所有的HotSpot虚拟机进程。
- jstat:jstat(JVM statistics Monitoring)是用于监视虚拟机运行时状态信息的命令,它可以显示出虚拟机进程中的类装载、内存、垃圾收集、JIT编译等运行数据。
- jmap:jmap(JVM Memory Map)命令用于生成heap dump文件,如果不使用这个命令,还阔以使用-XX:+HeapDumpOnOutOfMemoryError参数来让虚拟机出现OOM的时候·自动生成dump文件。 jmap不仅能生成dump文件,还阔以查询finalize执行队列、Java堆和永久代的详细信息,如当前使用率、当前使用的是哪种收集器等。
- jhat:jhat(JVM Heap Analysis Tool)命令是与jmap搭配使用,用来分析jmap生成的dump,jhat内置了一个微型的HTTP/HTML服务器,生成dump的分析结果后,可以在浏览器中查看。在此要注意,一般不会直接在服务器上进行分析,因为jhat是一个耗时并且耗费硬件资源的过程,一般把服务器生成的dump文件复制到本地或其他机器上进行分析。
- jstack:jstack用于生成java虚拟机当前时刻的线程快照。jstack来查看各个线程的调用堆栈,就可以知道没有响应的线程到底在后台做什么事情,或者等待什么资源。 如果java程序崩溃生成core文件,jstack工具可以用来获得core文件的java stack和native stack的信息,从而可以轻松地知道java程序是如何崩溃和在程序何处发生问题。
十一、OOM说一下?怎么排查?哪些会导致OOM?
OOM 异常
OOM 异常,在应用开发中,是比较常见的一种异常,就是我们常见的: “java.lang.OutOfMemoryError” 主要:
- java.lang.OutOfMemoryError:Java heap space
- java.lang.OutOfMemoryError:GC overhead limit exceeded
- java.lang.OutOfMemoryError:Permgen space
- java.lang.OutOfMemoryError:Metaspace
- java.lang.OutOfMemoryError:Unable to create new native thread
- java.lang.OutOfMemoryError:Out of swap space?
- java.lang.OutOfMemoryError:Requested array size exceeds VM limit
- Out of memory:Kill process or sacrifice child
出现OOM的情况,往往会导致:应用服务异常、线程异常、程序崩溃等
排查OOM问题
A 确认是不是内存本身就分配过小 方法:jmap -heap pid 查看对应的jvm的堆内存空间,比如eden区和old是否被占用等
B 找到最耗内存的对象 方法:jmap -histo:live pid | more
jmap 命令将对文件导出----》jstack pid导出线程信息----》利用分析工具对dump文件进行分析,加入文件过大可以用eclipse分析插件memory Alyse还是啥----》打开插件的monitor-tree,找到占用空间最多的线程。找到线程名,在jstack导出的文件下查看线程对应的类,用代码分析
C Linux命令行工具
查看进程创建的线程数,以及网络连接数,如果资源耗尽,也可能出现OOM pstree netstat
进程打开的句柄数和线程数 ll /proc/ P I D / f d ∣ w c − l l l / p r o c / {PID}/fd | wc -l ll /proc/ PID/fd∣wc−lll/proc/{PID}/task | wc -l (效果等同pstree -p | wc -l)
JAVASE
面向对象三大特性
封装
封装把一个对象的属性私有化,同时提供一些可以被外界访问的属性的方法,如果属性不想被外界访问,我们大可不必提供方法给外界访问。但是如果一个类没有提供给外界访问的方法,那么这个类也没有什么意义了。
继承
继承是使用已存在的类的定义作为基础建立新类的技术,新类的定义可以增加新的数据或新的功能,也可以用父类的功能,但不能选择性地继承父类。通过使用继承我们能够非常方便地复用以前的代码。
关于继承如下 3 点请记住:
子类拥有父类非 private 的属性和方法。
子类可以拥有自己属性和方法,即子类可以对父类进行扩展。
子类可以用自己的方式实现父类的方法。(以后介绍)。
多态
所谓多态就是指程序中定义的引用变量所指向的具体类型和通过该引用变量发出的方法调用在编程时并不确定,而是在程序运行期间才确定,即一个引用变量到底会指向哪个类的实例对象,该引用变量发出的方法调用到底是哪个类中实现的方法,必须在由程序运行期间才能决定。
Object类内的方法
Object是所有类的父类,任何类都默认继承Object。Object类到底实现了哪些方法?
-
clone方法:保护方法,实现对象的浅复制,只有实现了Cloneable接口才可以调用该方法,否则抛出CloneNotSupportedException异常。
-
getClass方法:final方法,获得运行时类型。
-
toString方法:该方法用得比较多,一般子类都有覆盖。
-
finalize方法:该方法用于释放资源。因为无法确定该方法什么时候被调用,很少使用。
-
equals方法:该方法是非常重要的一个方法。一般equals和==是不一样的,但是在Object中两者是一样的。子类一般都要重写这个方法。
-
hashCode方法:该方法用于哈希查找,重写了equals方法一般都要重写hashCode方法。这个方法在一些具有哈希功能的Collection中用到。一般必须满足obj1.equals(obj2)==true。可以推出obj1.hashCode()==obj2.hashCode(),但是hashCode相等不一定就满足equals。不过为了提高效率,应该尽量使上面两个条件接近等价。
-
wait方法:wait方法就是使当前线程等待该对象的锁,当前线程必须是该对象的拥有者,也就是具有该对象的锁。wait()方法一直等待,直到获得锁或者被中断。wait(long timeout)设定一个超时间隔,如果在规定时间内没有获得锁就返回。
调用该方法后当前线程进入睡眠状态,直到以下事件发生。
(1)其他线程调用了该对象的notify方法。
(2)其他线程调用了该对象的notifyAll方法。
(3)其他线程调用了interrupt中断该线程。
(4)时间间隔到了。
此时该线程就可以被调度了,如果是被中断的话就抛出一个InterruptedException异常。
-
notify方法:该方法唤醒在该对象上等待的某个线程。
-
notifyAll方法:该方法唤醒在该对象上等待的所有线程。
BIO NIO AIO
1、IO(同步阻塞)
传统的网络通讯模型,就是BIO,同步阻塞IO, 其实就是服务端创建一个ServerSocket, 然后就是客户端用一个Socket去连接服务端的那个ServerSocket, ServerSocket接收到了一个的连接请求就创建一个Socket和一个线程去跟那个Socket进行通讯。接着客户端和服务端就进行阻塞式的通信,客户端发送一个请求,服务端Socket进行处理后返回响应,在响应返回前,客户端那边就阻塞等待,上门事情也做不了。 这种方式的缺点, 每次一个客户端接入,都需要在服务端创建一个线程来服务这个客户端,这样大量客户端来的时候,就会造成服务端的线程数量可能达到了几千甚至几万,这样就可能会造成服务端过载过高,最后崩溃死掉。
2、NIO(同步非阻塞,JDK1.4)
NIO是一种同步非阻塞IO, 基于Reactor模型来实现的。其实相当于就是一个线程处理大量的客户端的请求,通过一个线程轮询大量的channel,每次就获取一批有事件的channel,然后对每个请求启动一个线程处理即可。这里的核心就是非阻塞,就那个selector一个线程就可以不停轮询channel,所有客户端请求都不会阻塞,直接就会进来,大不了就是等待一下排着队而已。这里面优化BIO的核心就是,一个客户端并不是时时刻刻都有数据进行交互,没有必要死耗着一个线程不放,所以客户端选择了让线程歇一歇,只有客户端有相应的操作的时候才发起通知,创建一个线程来处理请求。
3、AIO(NIO2,异步非阻塞,JDK1.7)
对于NIO来说,我们的业务线程是在IO操作准备好时,得到通知,接着就由这个线程自行进行IO操作,IO操作本身是同步的。但是对AIO来说,则更加进了一步,它不是在IO准备好时再通知线程,而是在IO操作已经完成后,再给线程发出通知。因此AIO是不会阻塞的,此时我们的业务逻辑将变成一个回调函数,等待IO操作完成后,由系统自动触发。
与NIO不同,当进行读写操作时,只须直接调用API的read或write方法即可。这两种方法均为异步的,对于读操作而言,当有流可读取时,操作系统会将可读的流传入read方法的缓冲区,并通知应用程序;对于写操作而言,当操作系统将write方法传递的流写入完毕时,操作系统主动通知应用程序。 即可以理解为,read/write方法都是异步的,完成后会主动调用回调函数。 在JDK1.7中,这部分内容被称作NIO.2,主要在Java.nio.channels包下增加了下面四个异步通道:
- AsynchronousSocketChannel
- AsynchronousServerSocketChannel
- AsynchronousFileChannel
- AsynchronousDatagramChannel
AIO是异步非阻塞IO,基于Proactor模型实现。 每个连接发送过来的请求,都会绑定一个Buffer,然后通知操作系统去完成异步的读,这个时间你就可以去做其他的事情,等到操作系统完成读之后,就会调用你的接口,给你操作系统异步读完的数据。这个时候你就可以拿到数据进行处理,将数据往回写,在往回写的过程,同样是给操作系统一个Buffer,让操作系统去完成写,写完了来通知你。这俩个过程都有buffer存在,数据都是通过buffer来完成读写。,
NIO 的核心概念
NIO之所以是同步,是因为它的accept/read/write方法的内核I/O操作都会阻塞当前线程。NIO的三大核心组件:通道(Channel)、缓冲(Buffer)、选择器(Selector)。
1、通道(Channel)
Channel是传统IO中的Stream(流)的升级版,是一个对象,可以通过它读取和写入数据。Stream是单向的、读写分离,Channel是双向的,既可以用来进行读操作,又可以用来进行写操作。Channel和Buffer的关系可以用下图来表示,
2、缓冲(Buffer)
Buffer可以理解为一块内存区域,可以写入数据,并且在之后读取它。这块内存被包装成NIO buffer对象,它提供了一些方法来更简单地操作内存。
使用 Buffer 读写数据一般遵循以下四个步骤:
- 写入数据到 Buffer;
- 调用 flip() 方法;
- 从 Buffer 中读取数据;
- 调用 clear() 方法或者 compact() 方法。
当向 Buffer 写入数据时,Buffer 会记录下写了多少数据。一旦要读取数据,需要通过 flip() 方法将 Buffer 从写模式切换到读模式。在读模式下,可以读取之前写入到 Buffer 的所有数据。
一旦读完了所有的数据,就需要清空缓冲区,让它可以再次被写入。有两种方式能清空缓冲区:调用 clear() 或 compact() 方法。clear() 方法会清空整个缓冲区。compact() 方法只会清除已经读过的数据。任何未读的数据都被移到缓冲区的起始处,新写入的数据将放到缓冲区未读数据的后面。
buffer有3个属性需要熟悉以理解buffer的工作原理:
- 容量(Capacity):缓冲区能够容纳的数据元素的最大数量。容量在缓冲区创建时被设定,并且永远不能被改变。
- 上界(Limit):写模式中等价于buffer的大小,即capacity;读模式中为当前缓冲区中一共有多少数据,即可读的最大位置。
- 位置(Position):下一个要被读或写的元素的位置。初始化为0,buffer满时,position最大值为capacity-1。
3、选择器(Selector)
选择器(Selector)可以实现一个单独的线程来监控多个注册在她上面的信道(Channel),通过轮询的选择机制,实现多路复用的效果。
NIO多路复用的主要步骤和元素:
- 首先,通过 Selector.open() 创建一个 Selector,作为类似调度员的角色。
- 然后,创建一个 ServerSocketChannel,并且向 Selector 注册,通过指定 SelectionKey.OP_ACCEPT,告诉调度员,它关注的是新的连接请求。
- 注意,为什么我们要明确配置非阻塞模式呢?这是因为阻塞模式下,注册操作是不允许的,会抛出 IllegalBlockingModeException 异常。
- Selector 阻塞在 select 操作,当有 Channel 发生接入请求,就会被唤醒。
- 在 具体的 方法中,通过 SocketChannel 和 Buffer 进行数据操作
IO 都是同步阻塞模式,所以需要多线程以实现多任务处理。而 NIO 则是利用了单线程轮询事件的机制,通过高效地定位就绪的 Channel,来决定做什么,仅仅 select 阶段是阻塞的,可以有效避免大量客户端连接时,频繁线程切换带来的问题,应用的扩展能力有了非常大的提高。
面向对象五大基本原则是什么(可选)
单一职责原则SRP(Single Responsibility Principle)
类的功能要单一,不能包罗万象,跟杂货铺似的。
开放封闭原则OCP(Open-Close Principle)
一个模块对于拓展是开放的,对于修改是封闭的,想要增加功能热烈欢迎,想要修改,哼,一万个不乐意。
里式替换原则LSP(the Liskov Substitution Principle LSP)
子类可以替换父类出现在父类能够出现的任何地方。比如你能代表你爸去你姥姥家干活。
依赖倒置原则DIP(the Dependency Inversion Principle DIP)
高层次的模块不应该依赖于低层次的模块,他们都应该依赖于抽象。抽象不应该依赖于具体实现,具体实现应该依赖于抽象。就是你出国要说你是中国人,而不能说你是哪个村子的。比如说中国人是抽象的,下面有具体的xx省,xx市,xx县。你要依赖的抽象是中国人,而不是你是xx村的。
接口分离原则ISP(the Interface Segregation Principle ISP)
设计时采用多个与特定客户类有关的接口比采用一个通用的接口要好。就比如一个手机拥有打电话,看视频,玩游戏等功能,把这几个功能拆分成不同的接口,比在一个接口里要好的多。
抽象类与接口的区别
抽象类
在面向对象领域,抽象类主要用来进行类型隐藏。那什么是类型隐藏呢?我们可以构造出一个固定的一组行为的抽象描述,但是这组行为却能够有任意个可能的具体实现方式。这个抽象描述就是抽象类,而这一组任意个可能的具体实现则表现为所有可能的派生类。
接口
Java中的接口是一系列方法的声明,是一些方法特征的集合,一个接口只有方法的特征没有方法的实现,因此这些方法可以在不同的地方被不同的类实现,而这些实现可以具有不同的行为(功能)。接口是一种特殊形式的抽象类。
抽象类和接口的区别
首先,抽象类在Java语言中表示的是一种继承关系,一个类只能使用一次继承关系。但是,一个类却可以实现多个接口。 其次,在抽象类的定义中,我们可以赋予方法的默认行为。但是在接口的定义中,方法却不能拥有默认行为,为了绕过这个限制,必须使用委托,但是这会 增加一些复杂性,有时会造成很大的麻烦。 抽象类在Java语言中体现了一种继承关系,要想使得继承关系合理,父类和派生类在概念本质上应该是相同的。对于接口来说则不然,并不要求接口的实现者和接口定义在概念本质上是一致的,仅仅是实现了接口定义的契约而已。
使用抽象类来定义允许多个实现的类型,比使用接口有一个明显的优势:抽象类的演化比接口的演化要容易的多。在后续的发行版中,如果希望在抽象类中增加一个方法,只增加一个默认的合理的实现即可,抽象类的所有实现都自动提供了这个新的方法。对于接口,这是行不通的。虽然可以在骨架实现类中增加一方法的实现来解决部分问题,但这不能解决不从骨架实现类继承的接口实现的问题。由此,设计公有的接口要非常谨慎,一旦一个接口被公开且被广泛实现,对它进行修改将是不可能的。
什么是死锁?
线程死锁是指由于两个或者多个线程互相持有对方所需要的资源,导致这些线程处于等待状态,无法前往执行。当线程进入对象的synchronized代码块时,便占有了资源,直到它退出该代码块或者调用wait方法,才释放资源,在此期间,其他线程将不能进入该代码块。当线程互相持有对方所需要的资源时,会互相等待对方释放资源,如果线程都不主动释放所占有的资源,将产生死锁。
怎么防止死锁?
预防死锁:
资源一次性分配:一次性分配所有资源,这样就不会再有请求了:(破坏请求条件)
只要有一个资源得不到分配,也不给这个进程分配其他的资源:(破坏请保持条件)
可剥夺资源:即当某进程获得了部分资源,但得不到其它资源,则释放已占有的资源(破坏不可剥夺条件)
资源有序分配法:系统给每类资源赋予一个编号,每一个进程按编号递增的顺序请求资源,释放则相反(破坏环路等待条件)
避免死锁:
预防死锁的几种策略,会严重地损害系统性能。因此在避免死锁时,要施加较弱的限制,从而获得 较满意的系统性能。由于在避免死锁的策略中,允许进程动态地申请资源。因而,系统在进行资源分配之前预先计算资源分配的安全性。若此次分配不会导致系统进入不安全的状态,则将资源分配给进程;否则,进程等待。其中最具有代表性的避免死锁算法是银行家算法。
银行家算法: 首先需要定义状态和安全状态的概念。系统的状态是当前给进程分配的资源情况。因此,状态包含两个向量Resource(系统中每种资源的总量)和Available(未分配给进程的每种资源的总量)及两个矩阵Claim(表示进程对资源的需求)和Allocation(表示当前分配给进程的资源)。安全状态是指至少有一个资源分配序列不会导致死锁。当进程请求一组资源时,假设同意该请求,从而改变了系统的状态,然后确定其结果是否还处于安全状态。如果是,同意这个请求;如果不是,阻塞该进程知道同意该请求后系统状态仍然是安全的。
检测死锁
首先为每个进程和每个资源指定一个唯一的号码;
然后建立资源分配表和进程等待表。
解除死锁:
当发现有进程死锁后,便应立即把它从死锁状态中解脱出来,常采用的方法有:
剥夺资源:从其它进程剥夺足够数量的资源给死锁进程,以解除死锁状态;
撤消进程:可以直接撤消死锁进程或撤消代价最小的进程,直至有足够的资源可用,死锁状态.消除为止;所谓代价是指优先级、运行代价、进程的重要性和价值等。
死锁的四个必要条件
(1) 互斥条件:一个资源每次只能被一个进程使用。
(2) 请求与保持条件:一个进程因请求资源而阻塞时,对已获得的资源保持不放。
(3) 不剥夺条件:进程已获得的资源,在末使用完之前,不能强行剥夺。
(4) 循环等待条件:若干进程之间形成一种头尾相接的循环等待资源关系。
这四个条件是死锁的必要条件,只要系统发生死锁,这些条件必然成立,而只要上述条件之
一不满足,就不会发生死锁。