深度学习(十四)Reinforce Learning概述
Reinforce Learning概述
- 前言
- 一、强化学习的概念
-
- 1.强化学习的定义
- 2.强化学习的总体框架
- 3.强化学习的步骤
-
- 1.function with unknown
- 2. define loss
- 3.optimization
- 4.其他重点基础概念
- 二、DQN(Deep Q Network)
-
- 1.算法目的
- 2.算法过程
- 3.训练方法:基于Q-learning的TD算法
- 4.蒙特卡罗算法
- 三、Policy-based RL
-
- 1.算法目的
- 2.算法过程
- 四、Action-Critic
-
- 1.算法目的
- 2.算法过程
- 五、No rewarding:Learning from demonstration
-
- 1.模仿学习
- 2.inverse RL
- 六、近端策略优化(PPO)
-
- 1.在线策略与离线策略
- 2.important sampling
- 总结
前言
本文将会步入强化学习的殿堂,不过只是对强化学习进行概述,让大家对强化学习在做的事情有一个大体的认识
一、强化学习的概念
1.强化学习的定义
- 强化学习是智能体(Agent)以“试错”的方式进行学习,通过与环境(Environment)进行交互获得的奖赏(Reward)驱动行为(Action),目标是使智能体获得最大的奖赏。
- 强化学习与前面所讲的监督学习有很大的不同,强化学习不需要依靠标签好的数据信息,甚至可以不需要大量的数据,强化学习通过自身学习去产生数据集,并且利用产生的数据集继续进行学习优化,找到最优的方式。
- 强化学习中,随机性十分重要,无论在行为的选择*还是state的产生都是随机产生的,正正是因为这些随机性,Agent才有可能搜索并发现未知的动作和未知的策略
2.强化学习的总体框架

- 首先我们可以看到一个environment,这个环境负责产生状态state(也叫观察值Observation),我们以下围棋为例,棋盘中每一步都是一个状态,而我们将状态记为 S n S_n Sn
- 然后我们将状态 S n S_n Sn输入到执行器Actor中 ,执行器中拥有一个处理状态的函数,负责计算出不同行为(Action)的概率,然后按照概率分布去随机选择其中一个行为去执行,也就是说即使是相同的状态输入,输出结果也不一定一样,因为它是按概率选择的(只要概率不为0都有可能被选中),而每个被选择的行为我们记为 A n A_n An,我们继续以下围棋为例,这就是指下哪一步的决策
- 我们将行为与状态归纳到一个元祖 π : ( s n , a n ) \pi:(s_n,a_n) π:(sn,an),这个我们叫做这一个状态的选择策略,而这个策略 π \pi π是一个概率密度函数,其中 π ( a ∣ s ) = P ( A = a ∣ S = s ) \pi(a|s)=P(A=a|S=s) π(a∣s)=P(A=a∣S=s)
- 最后我们将这个策略重新输入到Environment中,然后根据计算出其得分Reward,我们将这个奖励定义为 r t r_t rt,并且更新新的状态 S n + 1 S_{n+1} Sn+1,以下围棋为例,这指的就是更新棋盘并且占优的统计
3.强化学习的步骤

1.function with unknown
这一个具有未知数的函数其实就是我们前面所说的Actor,是一个神经网络。

并且这个网络与前面所讲过的分类器是一模一样的,输入是一个像素集,中间的神经网络可以用CNN,RNN等经典神经网络来进行建模,输出是一个类似分类器的结果,通过一个softmax函数计算出一个概率分布,然后随机选择一个输出作为本次的Action
2. define loss

每执行一个action后得到一个reward值,将这些reward值全部加起来作为我们的目标函数,我们的目标就是要使这个reward值最大,这个就是强化学习的损失函数。
3.optimization
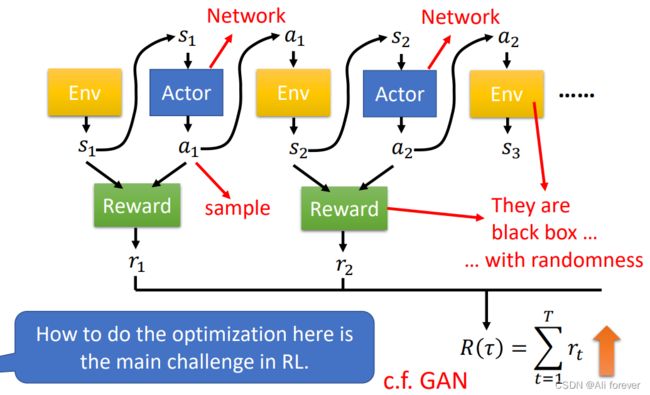
轨迹 τ = ( s 1 , a 1 , . . . , s n , a n ) \tau=(s_1,a_1,...,s_n,a_n) τ=(s1,a1,...,sn,an),每一个reward都是 r n = f ( s n , a n ) r_n=f(s_n,a_n) rn=f(sn,an),看上去十分类似一个RNN神经网络,但是事实上由于每一次输入相同的 s n s_n sn,输出的 a n a_n an具有随机性,所以结果并不相同,大大加深了强化学习的复杂度。除此之外,environment是一个黑盒子,并不是一个神经网络,只是一个输入与输出的函数,往往也具有随机性,无法用神经网络的眼光去看待
但是可以跟生成对抗网络GAN进行比较,我们可以将Action看作生成器,而environment和reward则是判别器
4.其他重点基础概念
- Action值函数: Q π ( s t , a t ) = E [ U t ∣ S t = s t , A t = a t ] Q_{\pi}(s_t,a_t)=E[U_t|S_t=s_t,A_t=a_t] Qπ(st,at)=E[Ut∣St=st,At=at],其中这个 U t U_t Ut是奖励函数,Action值函数所表征的意义给定该策略后利用该执行器的期望得分值,如果我们的实际得分值比预期得分值要高,说明该策略是优秀的,否则就是差劣的。
- 最优的Action值函数: Q ∗ ( s t , a t ) = arg max π Q π ( s t , a t ) Q^*(s_t,a_t)=\argmax\limits_{\pi}Q_{\pi}(s_t,a_t) Q∗(st,at)=πargmaxQπ(st,at),这个函数表征的是最优的一个策略方式。
- state价值函数: V π ( s t ) = E A [ Q π ( s t , A ) ] = ∑ a π ( a ∣ s t ) ∗ Q π ( s t , a ) V^{\pi}(s_t)=E_A[Q_{\pi}(s_t,A)]=\sum_a\pi(a|s_t)*Q_{\pi}(s_t,a) Vπ(st)=EA[Qπ(st,A)]=∑aπ(a∣st)∗Qπ(st,a),该函数表征的是在策略 π \pi π固定下状态的好坏情况,也就是快赢了还是快输了的情况。
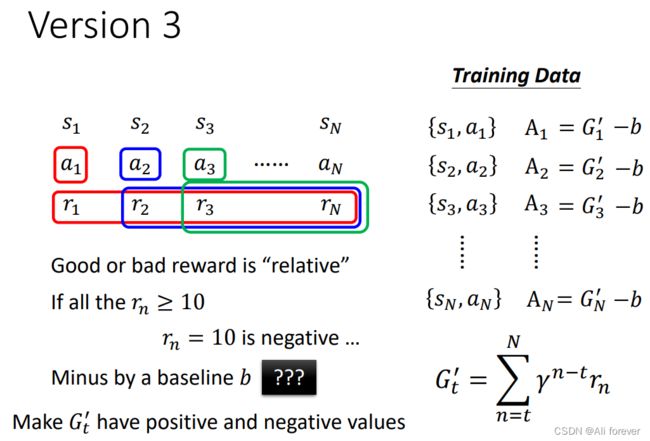
- reward函数:我们常用的reward函数一般为 U t = r 1 + γ r 2 + . . . + γ n − t r n U_t=r_1+\gamma r_2+...+\gamma^{n-t}r_n Ut=r1+γr2+...+γn−trn,这样的reward函数不仅仅考虑到了后续结果对当前决策的影响,同时也注意到了后续结果对决策影响的重要性(可以看到越后前面的系数越小),但是假设每个得分都很大时,该reward函数还需要正则化,使其有正有负,即现在还有另外一种reward函数。
二、DQN(Deep Q Network)
1.算法目的
我们上面说过,如果我们能获得最优的Action函数,那么我们在每次做决策的时候,总能十分优秀地往正确的决策方向去进行,但是事实上获取最优的Action函数是不合常理的,因为这需要我们具有预知未来的能力,很明显我们是无法做到的。
所以我们需要一个合适的方法去迫近这一个最优的Action函数,也就是我们所说的DQN,而这个迫近的神经网络为 Q ( s , a ; w ) Q(s,a;w) Q(s,a;w)
2.算法过程
首先训练出DQN,将状态 s t s_t st输入到DQN神经网络中,然后选出最佳的那一个行动 a t , a t = arg max a Q ( s t , a ; w ) a_t,a_t=\argmax_aQ(s_t,a;w) at,at=argmaxaQ(st,a;w),然后环境改变了状态得到新的状态 s t + 1 ∼ p ( ⋅ ∣ s t , a t ) s_{t+1}\sim p(\cdot|s_t,a_t) st+1∼p(⋅∣st,at),然后循环上述过程即可
3.训练方法:基于Q-learning的TD算法
不需要对整个过程进行仿真,只需要看到一部分内容,即可以进行训练。
我们观察reward函数,发现其满足以下一个重要等式: U t = r t + U t + 1 U_{t}=r_t+U_{t+1} Ut=rt+Ut+1
TD算法满足以下这个式子 Q ( s t , a t ; w ) ≈ r t + γ Q ( s t + 1 , a t + 1 ; w ) = r t + γ arg max a Q ( s t + 1 , a t ; w ) Q(s_t,a_t;w)\approx r_t+\gamma Q(s_{t+1},a_{t+1};w)\\=r_t+\gamma \argmax_aQ(s_{t+1},a_t;w) Q(st,at;w)≈rt+γQ(st+1,at+1;w)=rt+γaargmaxQ(st+1,at;w) r t r_t rt是一个真实值,并不是估计量,而Q的两项都是期望值,也就是说TD算法是用真实值与估计值去迫近估计值,我们的目标就是对 Q ( s t , a t ; w ) Q(s_t,a_t;w) Q(st,at;w)进行预测,获得该迫近的神经网络,从而获得最优的Action值函数
- 首先先初始化Q函数和目标Q函数,也就是说训练的Q函数与执行的Q函数不是同一个
- 给定状态s,基于Q采取行为a然后获取reward r和新状态s,将这些状态行为集合存放到缓冲区
- 在缓冲区中采样状态行为集合 { s n , a n } \{s_n,a_n\} {sn,an},然后计算目标y,更新参数去使Q函数的结果接近与y
- 最后在每隔C步之后使目标Q函数与计算Q函数相同
4.蒙特卡罗算法
本质上就是拿观察值去近似统计量,来降低算法的复杂度或者去求解一些无法统计的统计量值,如最优价值函数中 Q ∗ ( s t , a t ) = E [ R t + γ max a Q ∗ ( S t + 1 , a ) ] Q^*(s_t,a_t)=E[R_t+\gamma\max\limits_aQ^*(S_{t+1},a)] Q∗(st,at)=E[Rt+γamaxQ∗(St+1,a)]的得分值 R t R_t Rt全部获取是不现实的,我们可以只取其中的一个观测值 r t r_t rt即可。还有后面的那一个最优价值函数也同样只取观察值近似
三、Policy-based RL
1.算法目的
我们前面说过,策略函数的输入是状态,输出是一个概率分布,而想要获得一个最佳的输出值,需要穷尽所有的状态,才能找到最佳的Action分布
对于策略函数而言,如果状态不是有限个的(离散的),我们就不可能一个个策略去尝试去找到最优的执行Action
所以我们需要用一个神经网络去近似我们的策略函数 π ( a ∣ s ) \pi(a|s) π(a∣s)
2.算法过程
- 我们首先将我们的策略函数转化成状态值函数,这样也就将策略的好坏转化为了状态的好坏并且结果与执行的值Action无关。
- 我们的状态值函数的神经网络形式是 V ( S ; θ ) = ∑ a π ( a ∣ s ; θ ) ∗ Q π ( s , a ) V(S;\theta)=\sum_a\pi(a|s;\theta)*Q_{\pi}(s,a) V(S;θ)=∑aπ(a∣s;θ)∗Qπ(s,a),我们只需要使状态值函数的期望最大时,则能近似得到最佳的策略函数 J ( θ ) = E S [ V ( S ; θ ) ] J(\theta)=E_S[V(S;\theta)] J(θ)=ES[V(S;θ)]
- 随机选择其中一个状态 s t s_t st,然后利用蒙特卡罗算法去随机抽取一个行为 a t a_t at
- 然后计算出相应的期望函数 Q π ( s t , a t ) Q_{\pi}(s_t,a_t) Qπ(st,at),然后计算区分策略网络 d θ , t d_{\theta,t} dθ,t,最后得出策略梯度 g ( a t , θ t ) g(a_t,\theta_t) g(at,θt)
- 然后利用梯度上升算法去找到最佳的 θ \theta θ值, θ ← θ + β ∂ V ( S ; θ ) ∂ θ \theta \leftarrow \theta + \beta \frac{\partial V(S;\theta)}{\partial \theta} θ←θ+β∂θ∂V(S;θ)
四、Action-Critic
1.算法目的
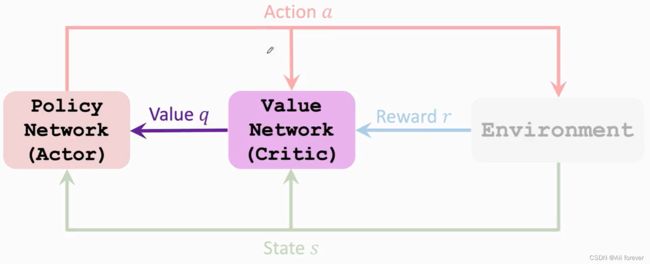
V π ( S ) = ∑ a π ( a ∣ s ) ∗ Q π ( s , a ) V^{\pi}(S)=\sum_a\pi(a|s)*Q_{\pi}(s,a) Vπ(S)=∑aπ(a∣s)∗Qπ(s,a)中我们既不清楚策略函数也不清楚Action值函数,但如果我们用两个神经网络分别近似它们的话问题可能就能解决。
而这两个函数分别是策略网络(actor) π ( a ∣ s ; θ ) \pi(a|s;\theta) π(a∣s;θ)和值网络(critic) q ( s , a ; w ) q(s,a;w) q(s,a;w)
2.算法过程
策略网络是以值网络的好坏来作为评判标准的,值网络可以理解成裁判,会给策略网络的分布进行打分,促进网络的优化。而值网络一开始是没有任何标准的,是一个随机过程,然后以分数reward来作为根据而对评判的标准进行优化值网络。
五、No rewarding:Learning from demonstration
1.模仿学习

actor可以与environment交互,但是计算不出reward或者reward一直为0,这时候我们需要有一系列的示范数据,也就是我们模仿出的结果
当然我们会发现这与监督学习很像,因为我们也是利用人类已有的样本去进行学习去优化,但是我们会发现人类做的不一定是对的,如果纯模仿的话,就失去了强化学习的意义了。
2.inverse RL

原来我们是用reward function去推导出相应的行为action,现在我们使用收集到的示例去通过这个inverse RL去学习到这一个reward function,再去学习得到新的actor

- 首先我们获得示范值,利用这个示范值获得的分数作为我们的teacher
- 然后初始化actor,再每个actor里面与环境进行交互去获取新的执行集,然后重新得到一个reward函数,尽量使其优于teacher
- 然后这个actor尝试基于这个reward函数去最大化reward值,最后输出整个系统的reward函数和actor

但事实上这就是一个生成对抗网络GAN,判别器就是teacher,生成器就是那个actor
六、近端策略优化(PPO)
1.在线策略与离线策略
- 在线策略:需要学习的agent与输入到环境的agent是同一个agent,也就是说一边学习一边去执行任务action
- 离线策略:需要学习的agent与输入到环境的agent不是同一个agent,这样就只需要利用一个数据集去更新,不需要每次更新一次都要重新收集数据集
2.important sampling
E x ∼ p θ ( x ) [ f ( x ) ] = ∫ f ( x ) p ( x ) d x = ∫ f ( x ) p ( x ) q ( x ) q ( x ) d x = E x ∼ q θ ( x ) [ f ( x ) p ( x ) q ( x ) ] E_{x \sim p_{\theta}(x)}[f(x)]=\int f(x)p(x)dx=\int f(x)\frac{p(x)}{q(x)}q(x)dx\\=E_{x \sim q_{\theta}(x)}[f(x)\frac{p(x)}{q(x)}] Ex∼pθ(x)[f(x)]=∫f(x)p(x)dx=∫f(x)q(x)p(x)q(x)dx=Ex∼qθ(x)[f(x)q(x)p(x)]
这样转化的原因是原函数中的分布很难获取,即使从里面随机抽取样本都极其困难,那我们就将其转化成另外一个与原概率分布很接近的分布进行计算
有了这个重要定理后,我们就可以实施我们的离线策略了,根据我们之前的累积函数,我们推导出一个新的累计函数用于输入到环境中
∇ R θ ˉ = E τ ∼ p θ ( τ ) [ R ( τ ) ∇ log p θ ( τ ) ] \nabla \bar{R_{\theta}}=E_{\tau \sim p_{\theta}(\tau)}[R(\tau)\nabla\log{p_{\theta}(\tau)}] ∇Rθˉ=Eτ∼pθ(τ)[R(τ)∇logpθ(τ)]
∇ R θ ˉ = E τ ∼ p θ ′ ( τ ) [ p θ ( τ ) p θ ′ ( τ ) R ( τ ) ∇ log p θ ( τ ) ] \nabla \bar{R_{\theta}}=E_{\tau \sim p'_{\theta}(\tau)}[\frac{p_{\theta}(\tau)}{p'_{\theta}(\tau)}R(\tau)\nabla\log{p_{\theta}(\tau)}] ∇Rθˉ=Eτ∼pθ′(τ)[pθ′(τ)pθ(τ)R(τ)∇logpθ(τ)]
我们要做的是利用我们假设的预估项 θ ′ \theta' θ′去输入到环境中从而更新真实的项所产生的参数 θ \theta θ
J θ ′ ( θ ) = E ( s t , a t ) ∼ π θ ′ [ p θ ( a t ∣ s t ) p θ ′ ( a t ∣ s t ) A θ ′ ( s t , a t ) ] J^{\theta'}(\theta)=E_{(s_t,a_t)\sim \pi_\theta'}[\frac{p_{\theta}(a_t|s_t)}{p'_{\theta}(a_t|s_t)}A^{\theta'}(s_t,a_t)] Jθ′(θ)=E(st,at)∼πθ′[pθ′(at∣st)pθ(at∣st)Aθ′(st,at)]
而在PPO中则加入了一个KL散度作为限制来使两个参数之间的值尽可能接近。
J P P O θ ′ ( θ ) = J θ ′ ( θ ) − β K L ( θ , θ ′ ) J^{\theta'}_{PPO}(\theta)=J^{\theta'}(\theta)-\beta KL(\theta,\theta') JPPOθ′(θ)=Jθ′(θ)−βKL(θ,θ′)
总结
本文主要介绍了强化学习的概述,由于强化学习涉及到的方面很多,无法进入深入地讨论,只是在框架上留下印象,帮助理解强化学习的运用