高斯牛顿法进行三维球拟合(含C++代码)
高斯牛顿法进行三维球拟合
-
- 最小二乘法
- 高斯牛顿法
- 三维球拟合
最小二乘法
\quad 我们假设目标函数为 F ( x ) F(x) F(x),误差函数为 f ( x ) f(x) f(x),则最小二乘可表示为 m i n F ( x ) = 1 2 ∥ f ( x ) ∥ 2 2 minF(x)=\frac{1}{2}\parallel f(x) \parallel {_2^2} minF(x)=21∥f(x)∥22 \quad 那么如何求解这个问题呢?
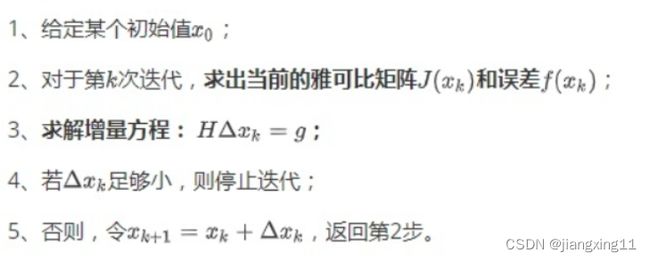
\quad 常规的思路就是对目标函数 F ( x ) F(x) F(x)进行求导,当其导数为0的时候,求 x x x的最优解,最终求得极值,这里需要注意导数为0的点,不一定就是极值点,可能会是鞍点,也就是我们所说的局部最优解。然而,有些时候,若目标函数 F ( x ) F(x) F(x)不是很容易进行求导,这时就需要使用一些迭代的方法,来使得目标函数 F ( x ) F(x) F(x)下降,这样就可以逐步迭代,求得最小值了。整个的迭代流程如下所示:
 \quad 因此,上述问题就变成了不断寻找下降增量 Δ x k \Delta x_k Δxk的问题。为了方便求解,我们只需要关心误差函数 f ( x ) f(x) f(x)在迭代值处的局部性质,而不用考虑目标函数 F ( x ) F(x) F(x)在迭代值处的全局性质。
\quad 因此,上述问题就变成了不断寻找下降增量 Δ x k \Delta x_k Δxk的问题。为了方便求解,我们只需要关心误差函数 f ( x ) f(x) f(x)在迭代值处的局部性质,而不用考虑目标函数 F ( x ) F(x) F(x)在迭代值处的全局性质。
\quad 下面介绍常见的两种优化算法:最速下降法(梯度下降法),它是用于找到可微函数的局部最小值的一阶迭代优化算法,如果实值函数 f ( x ) f(x) f(x)在点 x = a x=a x=a处可微且有定义,那么函数 f ( x ) f(x) f(x)在点 x = a x=a x=a处,沿着梯度的反方向 − Δ f ( a ) -\Delta f(a) −Δf(a)下降的最快,即之前提到需求解的增量 Δ x k = − Δ f ( a ) \Delta x_k=-\Delta f(a) Δxk=−Δf(a)。
当然,我们还需要该方向上取一个步长 λ,求得最快的下降方式,即 x n + 1 = x n − λ Δ f ( a ) x_{n+1}=x_n-\lambda\Delta f(a) xn+1=xn−λΔf(a)。它的缺点是过于贪心,容易走出锯齿路线,反而增加了迭代次数。
而牛顿法则是一个二阶梯度算法,它的增量的解可以从 H Δ x k = − J ( x ) T H\Delta x_k=-J(x)^T HΔxk=−J(x)T(具体推导过程可以查阅相关资料)解出。为了求解这个方程,此时需要计算目标函数的Hessian矩阵,这在问题规模较大时计算量非常大并且很难求解。
高斯牛顿法
\quad 前两种算法都是针对目标函数 F ( x ) F(x) F(x)求解,不可避免遇到求Hessian矩阵的问题,而高斯牛顿法则选取了误差函数 f ( x ) f(x) f(x)来进行优化求解,它的思想是将 f ( x ) f(x) f(x) 进行一阶的泰勒展开: f ( x + Δ x ) ≈ f ( x ) + J ( x ) T Δ x f(x+\Delta x)\approx f(x)+ \bm{J(x)} ^T\Delta x\quad\quad\quad\quad f(x+Δx)≈f(x)+J(x)TΔx \quad 上式中的 J ( x ) T \bm{J(x)}^T J(x)T为 f ( x ) f(x) f(x)的雅可比矩阵,或者简单来说,就是 f ( x ) f(x) f(x)关于 x x x的一阶导数。那么,我们从上面的迭代步骤2中可以看到,当前的目标是为了寻找下降矢量 Δ x \Delta x Δx,使得 ∥ f ( x + Δ x ) ∥ 2 2 \parallel f(x+\Delta x) \parallel {_2^2} ∥f(x+Δx)∥22达到最小。因此,我们的最小二乘问题变成如下问题: Δ x ∗ = a r g m i n 1 2 ∥ f ( x + Δ x ) ∥ 2 2 ≈ a r g m i n 1 2 ∥ f ( x ) + J ( x ) T Δ x ∥ 2 2 \Delta x^{*}=arg\;min\frac{1}{2}\parallel f(x+\Delta x) \parallel {_2^2}\approx arg\;min\frac{1}{2}\parallel f(x)+ \bm{J(x)} ^T\Delta x \parallel {_2^2} Δx∗=argmin21∥f(x+Δx)∥22≈argmin21∥f(x)+J(x)TΔx∥22
对上式进行关于 Δ x \Delta x Δx求导,并令其为0,具体推到可以查阅资料,于是得到如下方程组:
J ( x ) T J ( x ) Δ x = − J ( x ) T f ( x ) \bm{J(x)} ^T\bm{J(x)}\Delta x=-\bm{J(x)} ^Tf(x) J(x)TJ(x)Δx=−J(x)Tf(x)这个线性方程有很多种名称,如:增量方程,高斯牛顿方程或正规方程。我们把 J ( x ) T J ( x ) \bm{J(x)} ^T\bm{J(x)} J(x)TJ(x)定义为 H ( x ) H(x) H(x),把 − J ( x ) T f ( x ) -\bm{J(x)} ^Tf(x) −J(x)Tf(x)定义为 g ( x ) g(x) g(x),此时变成了: H Δ x = g H\Delta x=g HΔx=g这样,就可以优化求解了。上面的最小二乘的优化步骤就可以变为:
对比之前的牛顿法,两个式子中 H ( x ) H(x) H(x)含义不一样了。当然,这样的算法也有一定的问题,例如:如果求出来的步长 Δ x k \Delta x_k Δxk太大,会导致其局部近似不精确,严重的时候,可能无法保证迭代收敛。L-M算法又在这个基础上进行了改进,不过它不在这篇文章的讨论范围。
三维球拟合
\quad 任何拟合算法都会有一定的局限性,回到主题,我们将利用高斯牛顿法拟合三维球,空间三维球的方程为: ( x − a ) 2 + ( y − b ) 2 + ( z − c ) 2 = r 2 (x-a)^2+(y-b)^2+(z-c)^2=r^2 (x−a)2+(y−b)2+(z−c)2=r2其中, a , b , c a,b,c a,b,c分别为球心的xyz坐标, r r r为球半径。
对于这个方程,我们的目标是:找到参数 a , b , c , r a,b,c,r a,b,c,r合适的取值来求解下面这个最小二乘问题 min a , b , c , r ∑ i = 1 n 1 2 ∥ f i ( a , b , c , r ) ∥ 2 2 = min a , b , c , r ∑ i = 1 n 1 2 ∥ ( x i − a ) 2 + ( y i − b ) 2 + ( z i − c ) 2 − r i 2 ∥ 2 2 \min\limits_{a,b,c,r}\sum\limits_{i=1}^n\frac{1}{2}\parallel f_i(a,b,c,r) \parallel {_2^2}=\min\limits_{a,b,c,r}\sum\limits_{i=1}^n\frac{1}{2}\parallel (x_i-a)^2+(y_i-b)^2+(z_i-c)^2-r_i^2 \parallel {_2^2} a,b,c,rmini=1∑n21∥fi(a,b,c,r)∥22=a,b,c,rmini=1∑n21∥(xi−a)2+(yi−b)2+(zi−c)2−ri2∥22为了好看,写成矩阵形式,令 F ( a , b , c , r ) = [ f 1 ( a , b , c , r ) , f 2 ( a , b , c , r ) , ⋯ , f n ( a , b , c , r ) ] T F(a,b,c,r)=\begin{bmatrix}f_1(a,b,c,r),f_2(a,b,c,r),\cdots,f_n(a,b,c,r) \end{bmatrix}^T F(a,b,c,r)=[f1(a,b,c,r),f2(a,b,c,r),⋯,fn(a,b,c,r)]T,上式变为 ( a , b , c , r ) ∗ = a r g min ∥ F ( a , b , c , r ) ∥ 2 2 (a,b,c,r)^*=arg\;\min\parallel F(a,b,c,r) \parallel {_2^2} (a,b,c,r)∗=argmin∥F(a,b,c,r)∥22按照高斯牛顿法对其进行一阶泰勒展开:
F ( a k + 1 , b k + 1 , c k + 1 , r k + 1 ) ≈ F ( a k , b k , c k , r k ) + δ ∗ J k ( a , b , c , r ) F(a_{k+1},b_{k+1},c_{k+1},r_{k+1}) \approx F(a_{k},b_{k},c_{k},r_{k})+\delta* J_k(a,b,c,r) F(ak+1,bk+1,ck+1,rk+1)≈F(ak,bk,ck,rk)+δ∗Jk(a,b,c,r)
其中, δ = ( a k + 1 , b k + 1 , c k + 1 , r k + 1 ) − ( a k , b k , c k , r k ) \delta=(a_{k+1},b_{k+1},c_{k+1},r_{k+1})-(a_{k},b_{k},c_{k},r_{k}) δ=(ak+1,bk+1,ck+1,rk+1)−(ak,bk,ck,rk),更加直白一点就是目标参数两次迭代前后的差值。于是,最小二乘问题简化成为: δ ∗ = a r g min ∥ F ( a k , b k , c k , r k ) + δ ∗ J k ( a , b , c , r ) ∥ 2 2 \bm\delta^*=arg\;\min\parallel F(a_{k},b_{k},c_{k},r_{k})+\delta* J_k(a,b,c,r) \parallel {_2^2} δ∗=argmin∥F(ak,bk,ck,rk)+δ∗Jk(a,b,c,r)∥22现在,我们可以套用高斯牛顿里面的增量方程,得到 J k ( a k , b k , c k , r k ) T J k ( a k , b k , c k , r k ) δ = − J k ( a k , b k , c k , r k ) T F ( a k , b k , c k , r k ) J_k(a_k,b_k,c_k,r_k)^TJ_k(a_k,b_k,c_k,r_k) \bm\delta=-J_k(a_k,b_k,c_k,r_k) ^T F(a_{k},b_{k},c_{k},r_{k}) Jk(ak,bk,ck,rk)TJk(ak,bk,ck,rk)δ=−Jk(ak,bk,ck,rk)TF(ak,bk,ck,rk)其中, J k ( a k , b k , c k , r k ) J_k(a_k,b_k,c_k,r_k) Jk(ak,bk,ck,rk)为F的雅可比矩阵,即: J ( a , b , c , r ) = ∂ F ∂ ( a , b , c , r ) = [ ∂ f 1 ( a , b , c , r ) ∂ ( a , b , c , r ) , ∂ f 2 ( a , b , c , r ) ∂ ( a , b , c , r ) , ⋯ , ∂ f n ( a , b , c , r ) ∂ ( a , b , c , r ) ] T J(a,b,c,r) =\frac{\partial F}{\partial (a,b,c,r)}=\begin{bmatrix}\frac{\partial f_1(a,b,c,r)}{\partial (a,b,c,r)},\frac{\partial f_2(a,b,c,r)}{\partial (a,b,c,r)},\cdots,\frac{\partial f_n(a,b,c,r)}{\partial (a,b,c,r)}\end{bmatrix}^T J(a,b,c,r)=∂(a,b,c,r)∂F=[∂(a,b,c,r)∂f1(a,b,c,r),∂(a,b,c,r)∂f2(a,b,c,r),⋯,∂(a,b,c,r)∂fn(a,b,c,r)]T而 ∂ f ( a , b , c , r ) ∂ ( a , b , c , r ) = [ − 2 ( x − a ) , − 2 ( y − b ) , − 2 ( z − c ) , − 2 r ] T \frac{\partial f(a,b,c,r)}{\partial (a,b,c,r)}=\begin{bmatrix}-2(x-a),-2(y-b),-2(z-c),-2r\end{bmatrix}^T ∂(a,b,c,r)∂f(a,b,c,r)=[−2(x−a),−2(y−b),−2(z−c),−2r]T,将增量方程中的 δ \bm\delta δ解出,然后更新参数 ( a k + 1 , b k + 1 , c k + 1 , r k + 1 ) = ( a k , b k , c k , r k ) + δ (a_{k+1},b_{k+1},c_{k+1},r_{k+1})=(a_{k},b_{k},c_{k},r_{k})+\bm\delta (ak+1,bk+1,ck+1,rk+1)=(ak,bk,ck,rk)+δ,直至 δ \bm\delta δ足够小。
至此,全部理论部分已经说明完毕。如有错误,欢迎指正。
基于PCL的C++代码如下:
int main()
{
pcl::PointCloud<pcl::PointXYZ> src;
pcl::io::loadPLYFile("test.ply", src);
std::cout << "高斯牛顿曲线拟合" << "\n";
double ae = 2.0, be = -1.0, ce = 5.0, re = 600.0; //估计参数值
int N = src.size(); //数据点的个数
/*** 开始 Gauss-Newton ***/
int iterations = 100; //最高的迭代次数
//本次迭代的cost和上一次迭代的cost
//用于比较是不是误差越来越小,类似于开口向上的二次函数,去寻找极值点,不一定是最小值
double cost = 0, lastCost = 0;
for (int iter = 0; iter < iterations; iter++) {
//每次求解一次 Hδx = b;
Eigen::Matrix4d H = Eigen::Matrix4d::Zero();
Eigen::Vector4d b = Eigen::Vector4d::Zero();
cost = 0;
for (int i = 0; i < N; ++i) {
double xi = src.points[i].x;
double yi = src.points[i].y;
double zi = src.points[i].z;
//构建一个误差方程 f(x)
double error = std::pow((xi - ae), 2) + std::pow((yi - be), 2) + std::pow((zi - ce), 2) - re*re;
//定义雅克比
Eigen::Vector4d J;
J[0] = (-2.0*(xi - ae));
J[1] = (-2.0*(yi - be));
J[2] = (-2.0*(zi - ce));
J[3] = (-2.0*re);
H += J * J.transpose(); //J*J^t
b += -error * J; // -f(x)*J
cost += (error * error); //整个误差的方差
}
//采用ldlt 求解线性方程 Hδx = b
Eigen::Vector4d dx = H.ldlt().solve(b);
if (isnan(dx[0]))
{
std::cout << "result is nan!!!" << "\n";
break;
}
//当前的误差比之前的误差还要大,说明找到了一个极值点,停止迭代
if (iter > 0 && cost >= lastCost)
{
std::cout << "iter:" << cost << " >= last cost: " << lastCost << ",break." << "\n";
break;
}
//令 Xk+1 = Xk + δx
ae += dx[0];
be += dx[1];
ce += dx[2];
re += dx[3];
lastCost = cost;
std::cout << "total cost: " << cost << ",\t\tupdate: " << dx.transpose() << "\t\testimated params: " << ae << " , " << be << " , " << ce << " , " << re << "\n";
}
std::cout << " estimated params: " << ae << " , " << be << " , " << ce << " , " << re << "\n";
return 0;
}
参考链接.