施密特正交化(Gram-Schmidt Orthogonalization)
目录
- 1 Gram-Schmidt的计算公式推导
- 2 Gram-Schmidt的意义
- 3 Modified Gram-Schmidt (以算法模式计算正交向量)
-
- 3.1 Modified G-S会出现的问题:当矩阵开始存在微小误差时,会在运算过程中不断累积误差,导致越算越不准确,以至于计算所得的基不正交
- 4 Stable Gram-Schmidt
-
- 4.1 G-S 的复杂度(计算量)
- 4.2 使用SGS算法解决误差问题
- 4.3 MGS和SGS运算的区别在哪里?
- 5 GS和LS(最小二乘法)
- 6 参考资料
注:本博文为本人阅读论文、文章后的原创笔记,未经授权不允许任何转载或商用行为,否则一经发现本人保留追责权利。有问题可留言联系,欢迎指摘批评,共同进步!!!
1 Gram-Schmidt的计算公式推导
问 :以三维情况为例,已知三个线性无关的向量 a \mathbf{a} a、 b \mathbf{b} b、 c \mathbf{c} c,如何能找到三个正交向量 α 1 \bm{\alpha_1} α1、 α 2 \bm{\alpha_2} α2、 α 3 \bm{\alpha_3} α3,在归一化后能形成标准正交基: e 1 \mathbf{e_1} e1、 e 2 \mathbf{e_2} e2、 e 3 \mathbf{e_3} e3 ?
公式:
- 对三个线性无关的向量 a \mathbf{a} a、 b \mathbf{b} b、 c \mathbf{c} c进行Gram-Schmidt正交化,所得的正交向量 α 1 \bm{\alpha_1} α1、 α 2 \bm{\alpha_2} α2、 α 3 \bm{\alpha_3} α3分别为:
α 1 = a α 2 = b − b α 1 ∣ α 1 ∣ 2 α 1 α 3 = c − c α 1 ∣ α 1 ∣ 2 α 1 − c α 2 ∣ α 2 ∣ 2 α 2 \begin{aligned} \bm{\alpha_1} &= \mathbf{a} \\ \bm{\alpha_2} &= \mathbf{b}-\frac{\mathbf{b} \ \bm{\alpha_1}}{|\bm{\alpha_1}|^2} \ \bm{\alpha_1} \\ \bm{\alpha_3} &= \mathbf{c}-\frac{\mathbf{c} \ \bm{\alpha_1}}{|\bm{\alpha_1}|^2} \ \bm{\alpha_1}-\frac{\mathbf{c} \ \bm{\alpha_2}}{|\bm{\alpha_2}|^2} \ \bm{\alpha_2} \end{aligned} α1α2α3=a=b−∣α1∣2b α1 α1=c−∣α1∣2c α1 α1−∣α2∣2c α2 α2- 对 n n n个线性无关的向量 a \mathbf{a} a、 b \mathbf{b} b、 ⋯ \cdots ⋯、 x \mathbf{x} x进行Gram-Schmidt正交化,所得的正交向量 α 1 \bm{\alpha_1} α1、 α 2 \bm{\alpha_2} α2、 ⋯ \cdots ⋯、 α n \bm{\alpha_n} αn分别为:
α 1 = a α 2 = b − b α 1 ∣ α 1 ∣ 2 α 1 α 3 = c − c α 1 ∣ α 1 ∣ 2 α 1 − c α 2 ∣ α 2 ∣ 2 α 2 ⋮ α n = x − x α 1 ∣ α 1 ∣ 2 α 1 − x α 2 ∣ α 2 ∣ 2 α 2 − ⋯ − x α n − 1 ∣ α n − 1 ∣ 2 α n − 1 \begin{aligned} \bm{\alpha_1} &= \mathbf{a} \\ \bm{\alpha_2} &= \mathbf{b}-\frac{\mathbf{b} \ \bm{\alpha_1}}{|\bm{\alpha_1}|^2} \ \bm{\alpha_1} \\ \bm{\alpha_3} &= \mathbf{c}-\frac{\mathbf{c} \ \bm{\alpha_1}}{|\bm{\alpha_1}|^2} \ \bm{\alpha_1}-\frac{\mathbf{c} \ \bm{\alpha_2}}{|\bm{\alpha_2}|^2} \ \bm{\alpha_2} \\ \vdots \\ \bm{\alpha_n} &= \mathbf{x}-\frac{\mathbf{x} \ \bm{\alpha_1}}{|\bm{\alpha_1}|^2} \ \bm{\alpha_1}-\frac{\mathbf{x} \ \bm{\alpha_2}}{|\bm{\alpha_2}|^2} \ \bm{\alpha_2} \ - \ \cdots - \ \frac{\mathbf{x} \ \bm{\alpha_{n-1}}}{|\bm{\alpha_{n-1}}|^2} \ \bm{\alpha_{n-1}} \end{aligned} α1α2α3⋮αn=a=b−∣α1∣2b α1 α1=c−∣α1∣2c α1 α1−∣α2∣2c α2 α2=x−∣α1∣2x α1 α1−∣α2∣2x α2 α2 − ⋯− ∣αn−1∣2x αn−1 αn−1
公式解读:在使用第n个向量计算第n个正交向量时,只要在第n个向量中排除掉前(n-1)个正交向量的组分,就能得到第n个正交向量。
具体推导的图解请参看知乎回答。
2 Gram-Schmidt的意义
将非正交基转为正交基,便于表示。
通俗来说,就是将一对歪歪斜斜的基向量掰成标准正交基。(强迫症)
3 Modified Gram-Schmidt (以算法模式计算正交向量)
Gram-Schmidt公式推到中的方法是纯数的方法,但是在数值运算方法中(计算机操作)不会严格按照数学方法来。具体如下所述。
- 从Gram-Schmidt分解结果可以看出:
若对线性无关向量组{ w k \mathbf{w_k} wk}进行Schmidt正交化得到标准正交基{ u k \mathbf{u_k} uk},经过移项可得到原向量组 可以表示为标准正交基的线性组合:
w 1 = r 11 u 1 w 2 = r 21 u 1 + r 22 u 2 ⋮ w L = r L 1 u 1 + r L 2 u 2 + ⋯ + r L L u L \begin{aligned} \mathbf{w_1} &= r_{11} \ \mathbf{u_1} \\ \mathbf{w_2} &= r_{21} \ \mathbf{u_1} + r_{22} \ \mathbf{u_2} \\ &\vdots \\ \mathbf{w_L} &= r_{L1} \ \mathbf{u_1} + r_{L2} \ \mathbf{u_2} + \cdots + r_{LL}\mathbf{u_L} \\ \end{aligned} w1w2wL=r11 u1=r21 u1+r22 u2⋮=rL1 u1+rL2 u2+⋯+rLLuL
因此,要完成正交化分解,我们需要找系数组{ r k r_k rk}和标准正交基{ u k \mathbf{u_k} uk}:
由此,我们看拿出Modified G-S的思想是:
使用第k个线性无关向量组的向量 w k \mathbf{w_k} wk计算第k个正交基 u k \mathbf{u_k} uk时,就是在 w k \mathbf{w_k} wk中排除掉前 k − 1 k-1 k−1个正交基的组分,剩余的就是 u k \mathbf{u_k} uk的组分,再除以系数即可。
3.1 Modified G-S会出现的问题:当矩阵开始存在微小误差时,会在运算过程中不断累积误差,导致越算越不准确,以至于计算所得的基不正交
- 情景:假设 e e e是一个接近与0的正数(作为一个微小的初始误差),那么请对矩阵 W = ( 1 1 1 e 0 0 0 e 0 0 0 e ) \mathbf{W}\ = \begin{pmatrix} 1 & 1 & 1\\ e & 0 & 0\\ 0 & e & 0\\ 0 & 0 & e \end{pmatrix} W =⎝ ⎛1e0010e0100e⎠ ⎞ 进行Gram-Schmidt正交化:
此时问题就很明显地体现出来了,向量 u 2 \mathbf{u_2} u2和 u 3 \mathbf{u_3} u3明显不正交,没法作为正交基使用。
问题的原因:误差“e”作为一个很小的误差,在每一次派出组分操作的过程中都被积累起来了(误差积累),导致越往后算越不准确,Gram-Schmidt就失效了。
为了解决这一问题,就有了Stable Gram-Schmidt算法(SGS)。
4 Stable Gram-Schmidt
不同于Modified Gram-Schmidt,SGS算法的核心思想是:
每使用一个线性无关组向量 w k \mathbf{w_k} wk求出一个单位正交基向量 u k \mathbf{u_k} uk,那么剩余的 w k + 1 \mathbf{w_{k+1}} wk+1到 w L \mathbf{w_L} wL这些向量都要立即原地减去其中所含的 u k \mathbf{u_k} uk组分,进行更新。
每计算出一个新的单位正交基向量,就当场把剩余线性无关组向量中的此组分排除掉
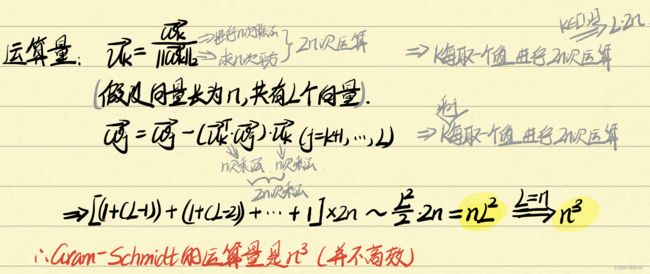
4.1 G-S 的复杂度(计算量)
4.2 使用SGS算法解决误差问题
与3.1中的问题一致,使用SGS可以抵消微小误差的影响,算法更具有鲁棒性。
4.3 MGS和SGS运算的区别在哪里?
我们注意到,使用两种算法计算所得的 u 3 \mathbf{u_3} u3向量时不同的,因此着重比较一下两算法计算 u 3 \mathbf{u_3} u3时的差别:( u 3 = v 3 ∣ ∣ v 3 ∣ ∣ 2 \mathbf{u_3} = \frac{\mathbf{v_3}}{||\mathbf{v_3}||_2} u3=∣∣v3∣∣2v3)
- MGS:(当使用到 w 3 \mathbf{w_3} w3计算 u 3 \mathbf{u_3} u3时,从 w 3 \mathbf{w_3} w3中一次性减去 u 1 \mathbf{u_1} u1和 u 2 \mathbf{u_2} u2的组分)
v 3 = w 3 − ( u 1 T w 3 ) u 1 − ( u 2 T w 3 ) u 2 \mathbf{v_3}=\mathbf{w_3}-(\mathbf{u_1^Tw_3})\mathbf{u_1}-(\mathbf{u_2^Tw_3})\mathbf{u_2} v3=w3−(u1Tw3)u1−(u2Tw3)u2 - SGS:(当利用 w 1 \mathbf{w_1} w1求出 u 1 \mathbf{u_1} u1时, w 2 \mathbf{w_2} w2和 w 3 \mathbf{w_3} w3都立即减去其中所含的 u 1 \mathbf{u_1} u1组分进行更新;当利用 w 2 n e w \mathbf{w_2^{new}} w2new求出 u 2 \mathbf{u_2} u2时, w 3 n e w \mathbf{w_3^{new}} w3new立即减去其中所含的 u 2 \mathbf{u_2} u2组分进行更新,然后再求出 u 3 \mathbf{u_3} u3)
w 3 n e w = w 3 − ( u 1 T w 3 ) u 1 v 3 = w 3 n e w − ( u 2 T w 3 n e w ) u 2 = ( w 3 − ( u 1 T w 3 ) u 1 ) − ( u 2 T ( w 3 − ( u 1 T w 3 ) u 1 ) ) u 2 = w 3 − ( u 1 T w 3 ) u 1 − ( u 2 T w 3 ) u 2 + ( u 1 T w 3 ) ( u 2 T u 1 ) u 2 \begin{aligned} \mathbf{w_3^{new}} &= \mathbf{w_3}-(\mathbf{u_1^Tw_3})\mathbf{u_1} \\ \mathbf{v_3} &= \mathbf{w_3^{new}}-(\mathbf{u_2^Tw_3^{new}})\mathbf{u_2} \\ &= (\mathbf{w_3}-(\mathbf{u_1^Tw_3})\mathbf{u_1})-(\mathbf{u_2^T(\mathbf{w_3}-(\mathbf{u_1^Tw_3})\mathbf{u_1})})\mathbf{u_2} \\ &= \mathbf{w_3}-(\mathbf{u_1^Tw_3})\mathbf{u_1}-(\mathbf{u_2^Tw_3})\mathbf{u_2} + (\mathbf{u_1^T}\mathbf{w_3})(\mathbf{u_2^T}\mathbf{u_1})\mathbf{u_2} \end{aligned} w3newv3=w3−(u1Tw3)u1=w3new−(u2Tw3new)u2=(w3−(u1Tw3)u1)−(u2T(w3−(u1Tw3)u1))u2=w3−(u1Tw3)u1−(u2Tw3)u2+(u1Tw3)(u2Tu1)u2
由此可见,SGS相较于MGS只是多了最后一项 ( u 1 T w 3 ) ( u 2 T u 1 ) u 2 (\mathbf{u_1^Tw_3})(\mathbf{u_2^Tu_1})\mathbf{u_2} (u1Tw3)(u2Tu1)u2.
从理论上讲, u 1 \mathbf{u_1} u1与 u 2 \mathbf{u_2} u2是要正交的,因此 u 2 T u 1 = 0 \mathbf{u_2^Tu_1}=0 u2Tu1=0,最后多出的这一项在理论上就是不存在了。
但是在数值计算(计算机运算)时候存在一定的误差,此时最后这一项不再为0,它的存在也有助于保证在误差存在情况下的稳定性。
这一项在理论上不存在,但实际上有利于保持stability.
5 GS和LS(最小二乘法)
在一个 k k k维空间中,我们已知了 k − 1 k-1 k−1个单位正交基向量 u 1 \mathbf{u_1} u1、 u 2 \mathbf{u_2} u2、 ⋯ \cdots ⋯、 u k − 1 \mathbf{u_{k-1}} uk−1,这些正交基列向量组成一个矩阵 A \mathbf{A} A={ u 1 u 2 ⋯ u k − 1 \mathbf{u_1} \ \mathbf{u_2} \ \cdots \ \mathbf{u_{k-1}} u1 u2 ⋯ uk−1}。此外,还已知一个在 k k k维上都有分量的向量 w \mathbf{w} w。问:如何找到第 k k k个单位正交基向量 u k \mathbf{u_k} uk呢?
实际上,要找到这最后一个正交向量,我们只需要排除掉向量 w \mathbf{w} w中所含有的前( k − 1 k-1 k−1)个单位正交向量组分即可。因此,我们可以找一个系数向量 x \mathbf{x} x,其中包含了前( k − 1 k-1 k−1)个单位正交向量组分的系数,在所有可能的向量 x \mathbf{x} x中,我们希望 A x \mathbf{Ax} Ax就是向量 w \mathbf{w} w中前( k − 1 k-1 k−1)个单位正交向量组分,因此可以使用LS算法来进行优化:
x ∗ = a r g min x ∣ ∣ w − A x ∣ ∣ 2 2 v k = w − A x ∗ u k = v k ∣ ∣ v k ∣ ∣ 2 \mathbf{x^*} = arg\min_{x}||\mathbf{w}-\mathbf{Ax}||_2^2 \\ \mathbf{v_k} = \mathbf{w}-\mathbf{Ax^*} \\ \mathbf{u_k} = \frac{\mathbf{v_k}}{||\mathbf{v_k}||_2} x∗=argxmin∣∣w−Ax∣∣22vk=w−Ax∗uk=∣∣vk∣∣2vk
我们来看看这个最优的 x ∗ \mathbf{x^*} x∗究竟是什么呢?
x ∗ = a r g min x ∣ ∣ w − A x ∣ ∣ 2 2 = ( A T A ) A T w k = A T w k = ( u 1 T w k ⋮ u k − 1 T w k ) \begin{aligned} \mathbf{x^*} &= arg\min_{x}||\mathbf{w}-\mathbf{Ax}||_2^2 \\ &=(\mathbf{A^TA})\mathbf{A^Tw_k} \\ &=\mathbf{A^Tw_k} \\ &= \begin{pmatrix} \mathbf{u_1^Tw_k} \\ \vdots \\ \mathbf{u_{k-1}^Tw_k} \end{pmatrix} \end{aligned} x∗=argxmin∣∣w−Ax∣∣22=(ATA)ATwk=ATwk=⎝ ⎛u1Twk⋮uk−1Twk⎠ ⎞
果然,最优的 x ∗ \mathbf{x^*} x∗就是由向量 w \mathbf{w} w中前 k − 1 k-1 k−1个单位正交基的组分的系数组成的。这样才能实现 ∣ ∣ w − A x ∣ ∣ 2 2 ||\mathbf{w}-\mathbf{Ax}||_2^2 ∣∣w−Ax∣∣22的最小化,即当向量 w \mathbf{w} w排除到其他组分后,剩下的 u k \mathbf{u_k} uk组分才能恰好与矩阵 A \mathbf{A} A所确定的超平面正交。
所以,回到问题,最后一个正交向量是:
v k = w − A x ∗ ( 把组分全部排除掉 ) \mathbf{v_k} = \mathbf{w}-\mathbf{Ax^*}(把组分全部排除掉) vk=w−Ax∗(把组分全部排除掉)
6 参考资料
- 讲解视频:数值线性代数之QR分解 (P3~P5)
- 知乎回答