摄像头的各种坐标系
坐标系
要谈坐标系变换,那么坐标系有哪些呢?依次有:物体坐标系,世界坐标系,相机坐标系,投影坐标系以及屏幕坐标系.我要讨论的就是这些坐标系间的转换。
这些坐标系不是凭空而来,他们都是为了完成计算机3D图形学最最最基本的目标而出现.计算机3D图形学最最最基本的目标就是:将构建好的3D物体显示在2D屏幕坐标上
3D坐标系 && 3D坐标系
世界坐标系
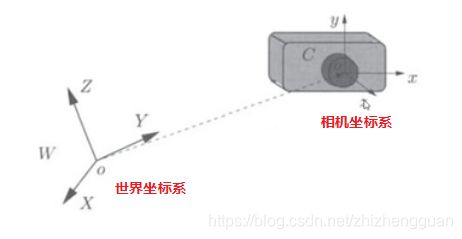
相机成像原理

针孔相机的模型:三维世界中的物体,经过相机成像系统,变成二维图像过程如下所示。

世界坐标系
由于摄像机可安放在环境中的任意位置,在环境中选择一个基准坐标系(可以根据运算方便与否自由放置。)来描述摄像机的位置,并用它描述环境中任何物体的位置,该坐标系称为世界坐标系。用( X w , Y w , Z w X_w, Y_w, Z_w Xw,Yw,Zw)表示其坐标值
比如做相机标定的时候,一般黑白棋盘格的世界坐标系原点定在第一个棋盘格的顶点,Xw,Yw,Zw互相垂直,Zw方向就是垂直于棋盘格面板的方向。且认为是Zw=0.
相机坐标系(光心坐标系)
以相机的光心为坐标原点,X 轴和Y 轴分别平行于图像坐标系的 X 轴和Y 轴(与相面的两边平行),相机的光轴为Z 轴。用( X c , Y c , Z c X_c, Y_c, Z_c Xc,Yc,Zc)表示其坐标值
图像物理坐标系&&图像像素坐标系
像素坐标系(pixel coordinate)
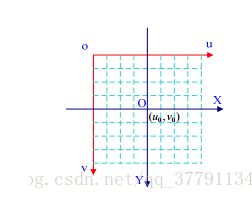
图6.4.1 ,像素坐标系是一个二维直角坐标系,反映了相机CCD/CMOS芯片中像素的排列情况。原点位于图像的左上角,轴、轴分别于像面的两边平行。像素坐标系中坐标轴的单位是像素(整数)。
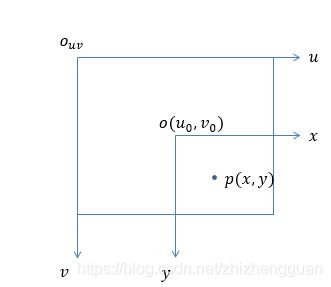
像素坐标系不利于坐标变换,因此需要建立图像坐标系,其坐标轴的单位通常为毫米(mm),原点是相机光轴与相面的交点(称为主点),即图像的中心点,轴、轴分别与轴、轴平行。故两个坐标系实际是平移关系,即可以通过平移就可得到。
数码相机采集的图像首先是形成标准电信号的形式,然后再通过模数转换变换为数字图像。每幅图像的存储形式是M × N的数组,M 行 N 列的图像中的每一个元素的数值代表的是图像点的灰度。这样的每个元素叫像素,像素坐标系就是以像素为单位的图像坐标系。
像素坐标系与图像坐标系的转换关系
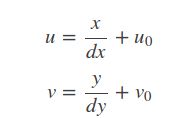
他们之间的转换关系为:
采用齐次坐标再用矩阵形式将上式表示为:
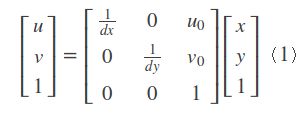
其中(u0, v0)是图像坐标系原点在像素坐标系中的坐标,dx 和 dy分别是每个像素在图像平面x和 y方向上的物理尺寸。
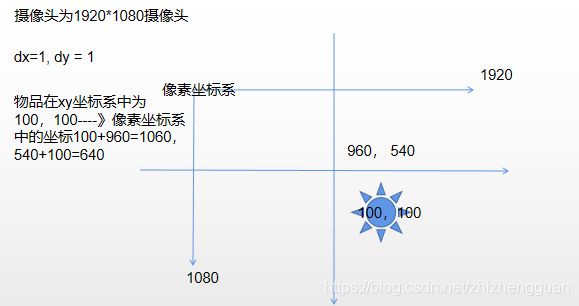
一个例子: