ISODATA算法 python实现
文章目录
- 前言
- 一、ISODATA的流程
-
- 1.流程图(这里按迭代的奇偶来判断分裂或者合并)
- 二、使用步骤
-
- 1.代码实现
- 2.迭代过程
- 3. 总结
前言
ISODATA经常被用来与Kmeans算法进行对比,其本质也是按照欧式距离来对样本进行分类,不同的是ISODATA可以根据一个大概的指定类别数去确定最终的聚类数(两者可能不同),而Kmeans指定聚类数是多少后,最终的聚类就一定是多少。
一、ISODATA的流程
本质上只有分裂和合并两个步骤加更新中心三个步骤。了解这个算法,核心需要解决下面的三个问题:
Question 1. 什么时候分裂?
现有的聚类数太少就进行分裂。你一开始指定100个聚类,现在只有2个,那就进行分裂。(大的分裂方向,还有细节见下面流程图)
Question 2. 什么时候合并?
现有的聚类数太多就进行分裂。你一开始指定100个聚类,现在上一次刚好裂成200个,那就进行合并。(大的合并方向,还有细节见下面流程图)
Question 3. 现在有的中心数不上不下怎么办?
如果是奇数次迭代,那就尝试去分裂吧(虽然最后不一定分裂了)
如果是偶数次迭代,那就尝试去合并吧(虽然最后不一定合并了)
1.流程图(这里按迭代的奇偶来判断分裂或者合并)
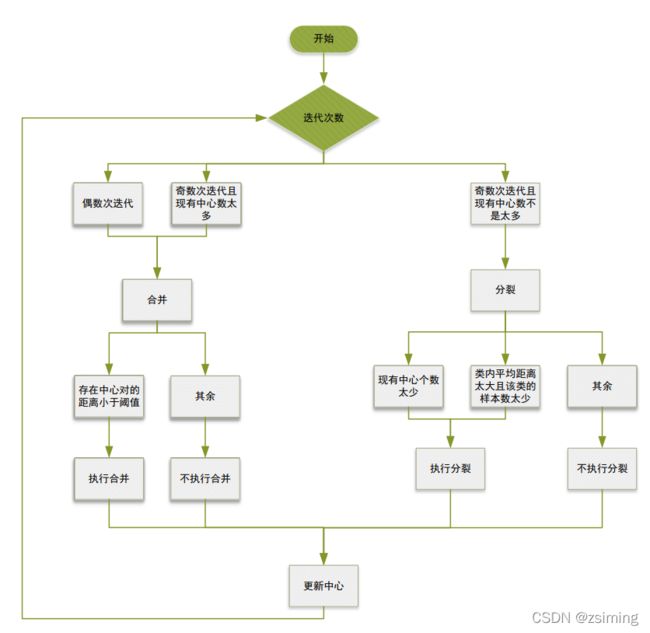
注意:
在流程图中,“合并”步骤并不一定执行了合并,只有满足在所有的中心中,存在一些中心的距离太近(这个距离低于了设定的阈值)才会真正的执行合并的操作,其余不执行合并的操作。而在分裂中,只有现有的中心数太少或者满足”类内的距离太大而且样本数太少“进行分裂的操作。其中类内的距离太大则表示了这个聚类太过于松散,再加上类的数量太少的话,才进行分裂。
分裂的细节:如何分裂?
计算需要分裂的这个簇在各个维度上的方差,如果最大的方差超过了特定的阈值,就在这个最大方差的维度上分裂成两个,其他维度的值保持不变。
比如现在有一个中心 (1, 3) , 对于属于这个中心的所有样本,我们计算其在第一个维度 (数值1的维度) 的方差,再计算其在第二个维度 (数值3的维度) 的方差。假设维度1计算的方差结果为 0.3,维度2计算的方差为1.5,预先设定的阈值为0.5;所以我们要在第二个维度上把中心分成2个:(1, 3 + 1.5 * k ), (1, 3 - 1.5 *k) ,其中k又是控制分裂远近的一个超参数,在代码中取0.5。由此,我们得到了新分裂的两个中心,并把原来的中心去掉。
合并的细节: 如何合并?
合并使用加权平均的方法,两个权重是两个中心控制的两簇样本的数量百分比,加权求和即可。
二、使用步骤
1.代码实现
Tips: 注意需要用到sklearn的库来产生数据集:
# -*- encoding:utf-8 -*-
"""
@author:zsiming
@fileName:ISODATA.py
@Time:2022/1/9 12:33
"""
import numpy as np
import seaborn as sns
import matplotlib.pyplot as plt
from sklearn.datasets import make_blobs
from sklearn.metrics import euclidean_distances
class ISODATA():
def __init__(self, designCenterNum, LeastSampleNum, StdThred, LeastCenterDist, iterationNum):
# 指定预期的聚类数、每类的最小样本数、标准差阈值、最小中心距离、迭代次数
self.K = designCenterNum
self.thetaN = LeastSampleNum
self.thetaS = StdThred
self.thetaC = LeastCenterDist
self.iteration = iterationNum
# 初始化
self.n_samples = 1500
# 选一
self.random_state1 = 200
self.random_state2 = 160
self.random_state3 = 170
self.data, self.label = make_blobs(n_samples=self.n_samples, random_state=self.random_state3)
self.center = self.data[0, :].reshape((1, -1))
self.centerNum = 1
self.centerMeanDist = 0
# seaborn风格
sns.set()
def updateLabel(self):
"""
更新中心
"""
for i in range(self.centerNum):
# 计算样本到中心的距离
distance = euclidean_distances(self.data, self.center.reshape((self.centerNum, -1)))
# 为样本重新分配标签
self.label = np.argmin(distance, 1)
# 找出同一类样本
index = np.argwhere(self.label == i).squeeze()
sameClassSample = self.data[index, :]
# 更新中心
self.center[i, :] = np.mean(sameClassSample, 0)
# 计算所有类到各自中心的平均距离之和
for i in range(self.centerNum):
# 找出同一类样本
index = np.argwhere(self.label == i).squeeze()
sameClassSample = self.data[index, :]
# 计算样本到中心的距离
distance = np.mean(euclidean_distances(sameClassSample, self.center[i, :].reshape((1, -1))))
# 更新中心
self.centerMeanDist += distance
self.centerMeanDist /= self.centerNum
def divide(self):
# 临时保存更新后的中心集合,否则在删除和添加的过程中顺序会乱
newCenterSet = self.center
# 计算每个类的样本在每个维度的标准差
for i in range(self.centerNum):
# 找出同一类样本
index = np.argwhere(self.label == i).squeeze()
sameClassSample = self.data[index, :]
# 计算样本到中心每个维度的标准差
stdEachDim = np.mean((sameClassSample - self.center[i, :])**2, axis=0)
# 找出其中维度的最大标准差
maxIndex = np.argmax(stdEachDim)
maxStd = stdEachDim[maxIndex]
# 计算样本到本类中心的距离
distance = np.mean(euclidean_distances(sameClassSample, self.center[i, :].reshape((1, -1))))
# 如果最大标准差超过了阈值
if maxStd > self.thetaS:
# 还需要该类的样本数大于于阈值很多 且 太分散才进行分裂
if self.centerNum <= self.K//2 or \
sameClassSample.shape[0] > 2 * (self.thetaN+1) and distance >= self.centerMeanDist:
newCenterFirst = self.center[i, :].copy()
newCenterSecond = self.center[i, :].copy()
newCenterFirst[maxIndex] += 0.5 * maxStd
newCenterSecond[maxIndex] -= 0.5 * maxStd
# 删除原始中心
newCenterSet = np.delete(newCenterSet, i, axis=0)
# 添加新中心
newCenterSet = np.vstack((newCenterSet, newCenterFirst))
newCenterSet = np.vstack((newCenterSet, newCenterSecond))
else:
continue
# 更新中心集合
self.center = newCenterSet
self.centerNum = self.center.shape[0]
def combine(self):
# 临时保存更新后的中心集合,否则在删除和添加的过程中顺序会乱
delIndexList = []
# 计算中心之间的距离
centerDist = euclidean_distances(self.center, self.center)
centerDist += (np.eye(self.centerNum)) * 10**10
# 把中心距离小于阈值的中心对找出来
while True:
# 如果最小的中心距离都大于阈值的话,则不再进行合并
minDist = np.min(centerDist)
if minDist >= self.thetaC:
break
# 否则合并
index = np.argmin(centerDist)
row = index // self.centerNum
col = index % self.centerNum
# 找出合并的两个类别
index = np.argwhere(self.label == row).squeeze()
classNumFirst = len(index)
index = np.argwhere(self.label == col).squeeze()
classNumSecond = len(index)
newCenter = self.center[row, :] * (classNumFirst / (classNumFirst+ classNumSecond)) + \
self.center[col, :] * (classNumSecond / (classNumFirst+ classNumSecond))
# 记录被合并的中心
delIndexList.append(row)
delIndexList.append(col)
# 增加合并后的中心
self.center = np.vstack((self.center, newCenter))
self.centerNum -= 1
# 标记,以防下次选中
centerDist[row, :] = float("inf")
centerDist[col, :] = float("inf")
centerDist[:, col] = float("inf")
centerDist[:, row] = float("inf")
# 更新中心
self.center = np.delete(self.center, delIndexList, axis=0)
self.centerNum = self.center.shape[0]
def drawResult(self):
ax = plt.gca()
ax.clear()
ax.scatter(self.data[:, 0], self.data[:, 1], c=self.label, cmap="cool")
# ax.set_aspect(1)
# 坐标信息
ax.set_xlabel('x axis')
ax.set_ylabel('y axis')
plt.show()
def train(self):
# 初始化中心和label
self.updateLabel()
self.drawResult()
# 到设定的次数自动退出
for i in range(self.iteration):
# 如果是偶数次迭代或者中心的数量太多,那么进行合并
if self.centerNum < self.K //2:
self.divide()
elif (i > 0 and i % 2 == 0) or self.centerNum > 2 * self.K:
self.combine()
else:
self.divide()
# 更新中心
self.updateLabel()
self.drawResult()
print("中心数量:{}".format(self.centerNum))
if __name__ == "__main__":
isoData = ISODATA(designCenterNum=5, LeastSampleNum=20, StdThred=0.1, LeastCenterDist=2, iterationNum=20)
isoData.train()
2.迭代过程
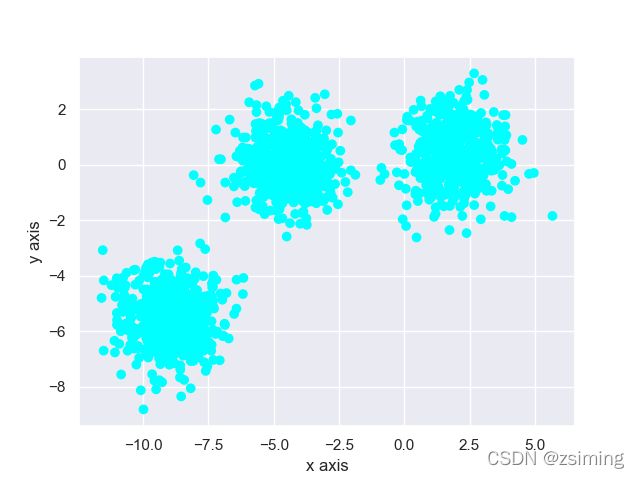
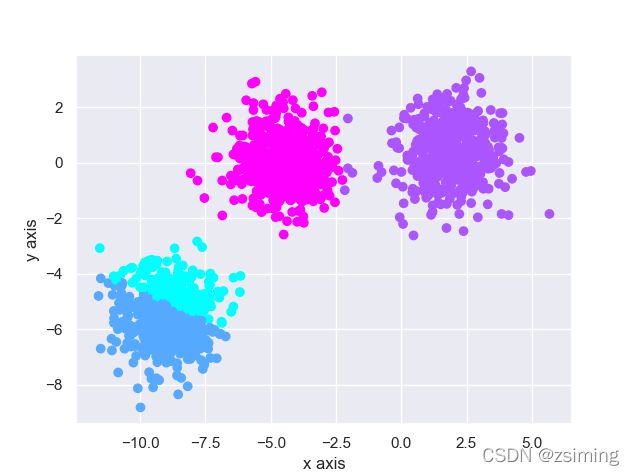
1. 原始数据如下图所示,可以看见我在这儿比较明显的生成三个簇的数据(然后指定类别数为5):
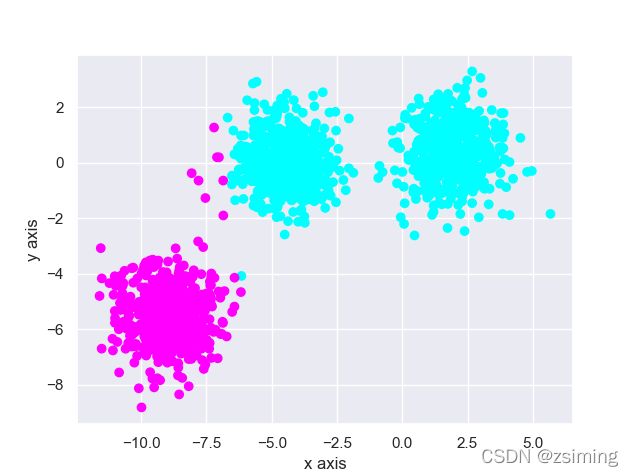
2. 从一个中心分裂成为两个中心(用颜色区分不同的聚类):
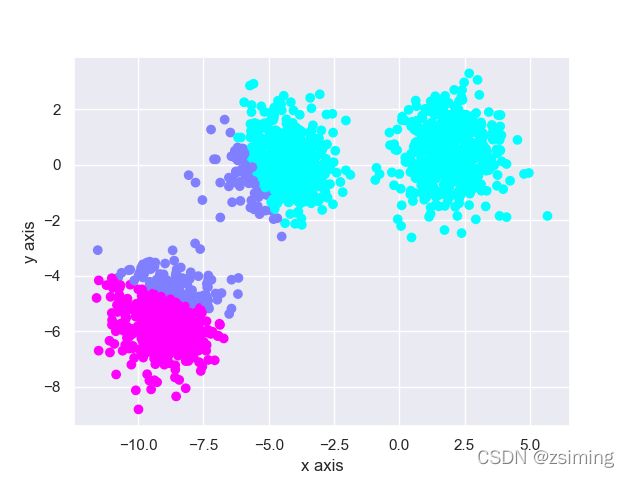
3. 未到达指定类别数(2 < 5)继续分裂为4个中心:

4.中心贴得太近了,需要合并:
5. 更新中心的位置和分裂:
6.中心贴得太近了,合并
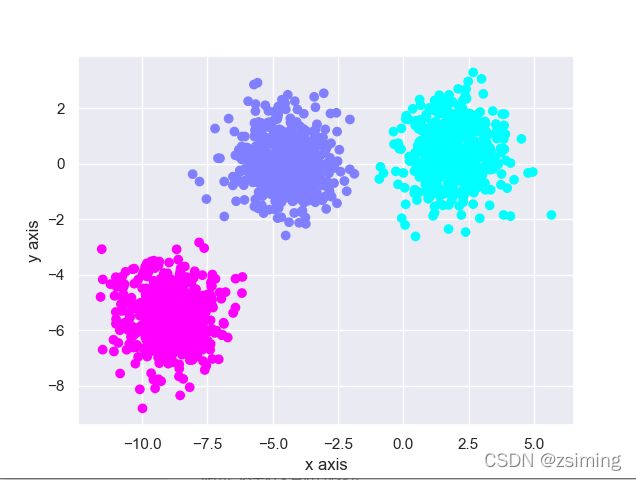
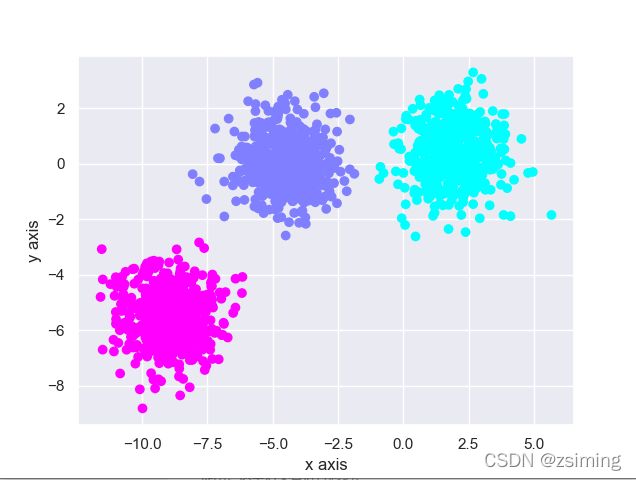
7.后面将不再变化。
3. 总结
个人觉得:
从参数的角度来看,相比于Kmeans,由一个超参数数变成了六个超参数,不能说是改进。只能说某些先验知识比较完善的情况下,可能适用于数据流形分布比较复杂的场景。