速腾(Robosense) M1激光雷达调试记录(含ROS配置及常见问题)
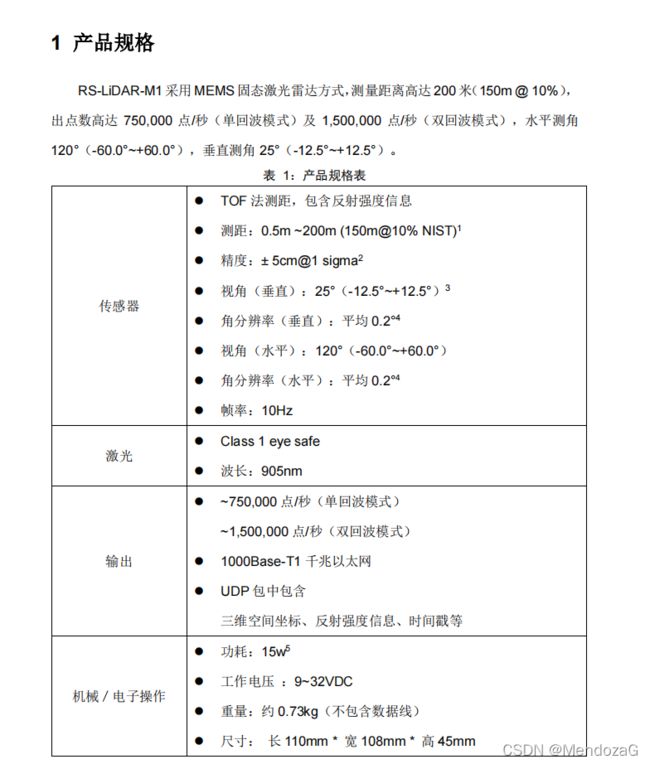
速腾M1激光雷达,是一款量产的固态MEMS激光雷达,性能处于业界领先水平,其参数如下(来源于M1用户手册,2021年12月版):
值得注意的是:M1提供的 RS—View并不与之前的16线32线等激光雷达共用,需要重新下载对应版本(向你的供应商要或者在官网下载)。
资源中心 - RoboSense(速腾聚创) - 自动驾驶激光雷达全球领先的智能激光雷达系统科技企业,通过激光雷达硬件、AI算法与芯片三大核心技术闭环,为市场提供具有信息理解能力的Smart LiDAR Sensor System。https://www.robosense.cn/resources-11
与16线的激光雷达等IP配置方法(见我另一篇:16线配置)不同,M1配置需要通过小工具:little-robo

打开little-robo,选择project中的M0210

左边两个是默认的主机IP和激光雷达IP,目前是未连接状态。把主机IP调整为192.168.1.102,打开wireshark,查看是否正常接受(若之前不是默认值,则可以在wireshark中查看broadcast找到两个的IP),连接上后我们点击link可以获取到设备的信息:

更改需要的设备ip和主机ip点击TST和ECU等待相应后拔掉电源重新上电即可使用。
打开RS-View,需要先配置正确(Tools->sensor network configuration)
port改为上图对应的port

配置完毕后,选择

再选择MEMSCorrectionFile_3V 的雷达参数,选择此参数后点击 OK。即可正常显示。

可以看出效果是不错的。
-----------------------------------------------------------------------------------------------------------------------
以下是ros配置,M1支持ROS1和ROS2的配置,这里只说明ROS1
先在该页面下载:Releases · RoboSense-LiDAR/rslidar_sdk · GitHub

下载其一,最新的版本,值得注意的是,ros_drive需要手动下载后面放进去否则会编译失败!
ros_drive:ros_drive下载
将source code解压放到你的catkin_ws,并将上面的链接克隆到 rslidar-sdk/src 路径下。
将rslidar_sdk工程目录下的*package_ros1.xml*文件复制到*package.xml*(此处为新的改动,不要重命名否则会编译失败,缺少ros1的xml)


其余的按照上述步骤完成即可。

正常显示如上图。
--------------------------------------------------------------------------------------------
常见问题:
1.编译错误没有找到ros1.xml
如上文中所说,不要按手册直接重命名,而是应当复制一份再重命名。
2.编译时出现:
The imported target "vtkRenderingPythonTkWidgets" references the file
.......
The imported target "vtk" references the file
"/usr/bin/vtk"
........先检查是否安装,若有则创建两个link即可

注意你的机器是arm架构还是x86架构
arm使用:
sudo ln -s /usr/lib/python2.7/dist-packages/vtk/libvtkRenderingPythonTkWidgets.aarch64-linux-gnu.so /usr/lib/aarch64-linux-gnu/libvtkRenderingPythonTkWidgets.so
x86使用:
sudo ln -s /usr/lib/python2.7/dist-packages/vtk/libvtkRenderingPythonTkWidgets.x86_64-linux-gnu.so /usr/lib/x86_64-linux-gnu/libvtkRenderingPythonTkWidgets.so
通用:
sudo ln -s /usr/bin/vtk6 /usr/bin/vtk