A星(AStar)算法的实现
关于AStar的原理这里简述一下,
首先有一张地图,然后准备一个open list 和 close list,open list存放所有可能的路径,但是需要注意的是这个列表是动态怎加的,也就是每走一步就把当前可能的路径都加进去,然后每次从open list中去除一个最小代价的点,最为下一步的路径,并用该点计算之后可能的路径 在加入到open list中去,然后把这个代价最小的点放到close list中,表示该点已经走过了,如此循环直到从open list取出的最小代价点为 终点,此时通过回溯找到路径;代价的计算方法具有多样性,如何计算可以自行百度;
首先是python的实现:
import numpy as np
import heapq
class Node:
def __init__(self, coord, parent=None, g=0, h=0):
self.coord = coord
self.parent: Node = parent
self.g = g
self.h = h
self.f = g + h
self.master = 0
# self.iter = self.gen_data()
# def gen_data(self):
# cur_node = self
# while 1:
# if cur_node is None:
# break
# yield cur_node
# cur_node = cur_node.parent
#
# def __iter__(self):
# return self.iter
def __gt__(self, other):
return self.f > other.f
def __lt__(self, other):
return self.f < other.f
def __eq__(self, other):
return self.f == other.f
def __str__(self):
return "<(%s,%s) G: %s,H: %s,F: %s> " % (self.coord[0], self.coord[1], self.g, self.h, self.f)
__repr__ = __str__
class Walker:
def __init__(self, node):
self.node = node
self.iter = self.gen_data()
def gen_data(self):
cur_node = self.node
while 1:
if cur_node is None:
break
yield cur_node
cur_node = cur_node.parent
def __iter__(self):
return self.iter
class AStar:
def __init__(self, world_map, bar_value, direct_cost, oblique_cost):
self.world_map = world_map
self.bar_value = bar_value
self.direct_cost = direct_cost
self.oblique_cost = oblique_cost
self.map_cache = np.zeros_like(world_map)
def new_node(self, prev_node: Node, end_node, x, y, weight):
coord = x, y
height, width = self.world_map.shape
if x < 0 or x >= width or y < 0 or y >= height:
return
color = self.world_map[y, x]
if color == self.bar_value:
return
H = abs(end_node.coord[0] - x) * self.direct_cost + abs(end_node.coord[1] - y) * self.direct_cost
G = prev_node.g + weight
t_node = Node(coord, prev_node, G, H)
return t_node
def get_neighbors(self, p_node, end_node):
coord = p_node.coord
up = self.new_node(p_node, end_node, coord[0], coord[1] - 1, self.direct_cost)
down = self.new_node(p_node, end_node, coord[0], coord[1] + 1, self.direct_cost)
left = self.new_node(p_node, end_node, coord[0] - 1, coord[1], self.direct_cost)
right = self.new_node(p_node, end_node, coord[0] + 1, coord[1], self.direct_cost)
# return up, down, left, right
left_up = self.new_node(p_node, end_node, coord[0] - 1, coord[1] - 1, self.oblique_cost)
right_up = self.new_node(p_node, end_node, coord[0] + 1, coord[1] - 1, self.oblique_cost)
left_down = self.new_node(p_node, end_node, coord[0] - 1, coord[1] + 1, self.oblique_cost)
right_down = self.new_node(p_node, end_node, coord[0] + 1, coord[1] + 1, self.oblique_cost)
return up, down, left, right, left_up, right_up, left_down, right_down
def find_path(self, start_node, end_node):
open_ls = []
close_ls = []
self.map_cache[:, :] = 0
heapq.heappush(open_ls, start)
self.map_cache[start_node.coord[1], start_node.coord[0]] = 1
while 1:
if len(open_ls) == 0:
print("failed!")
break
cur_node: Node = heapq.heappop(open_ls)
if cur_node.coord == end_node.coord:
print("success")
return cur_node
for node in self.get_neighbors(cur_node, end_node):
if node is None:
continue
if self.map_cache[node.coord[1], node.coord[0]] != 0:
continue
heapq.heappush(open_ls, node)
self.map_cache[node.coord[1], node.coord[0]] = 1
close_ls.append(cur_node)
self.map_cache[cur_node.coord[1], cur_node.coord[0]] = 2
# #
if __name__ == '__main__':
import time
import cv2
default_bar_value = 70
default_set_path = 255
DIRECT_WEIGHT = 10
OBLIQUE_WEIGHT = 14
# create a map
maps = np.zeros((650, 750), np.intc) + 1
maps[40:, 20:30] = default_bar_value
maps[:400, 100:110] = default_bar_value
maps[100:, 200:210] = default_bar_value
maps[:200, 300:310] = default_bar_value
maps[220:230, 210:710] = default_bar_value
maps[220:600, 710:720] = default_bar_value
maps[600:610, 300:720] = default_bar_value
maps[300:610, 300:310] = default_bar_value
start = Node((10, 10)) # start coord
end = Node((600, 400)) # end coord
finder = AStar(maps, default_bar_value, DIRECT_WEIGHT, OBLIQUE_WEIGHT)
t0 = time.time()
node = finder.find_path(start, end)
print("耗时:", time.time()-t0)
for node in Walker(node):
maps[node.coord[1], node.coord[0]] = default_set_path
maps = maps.astype(np.uint8)
maps = maps.reshape((*maps.shape, 1))
maps = maps.repeat(3, 2)
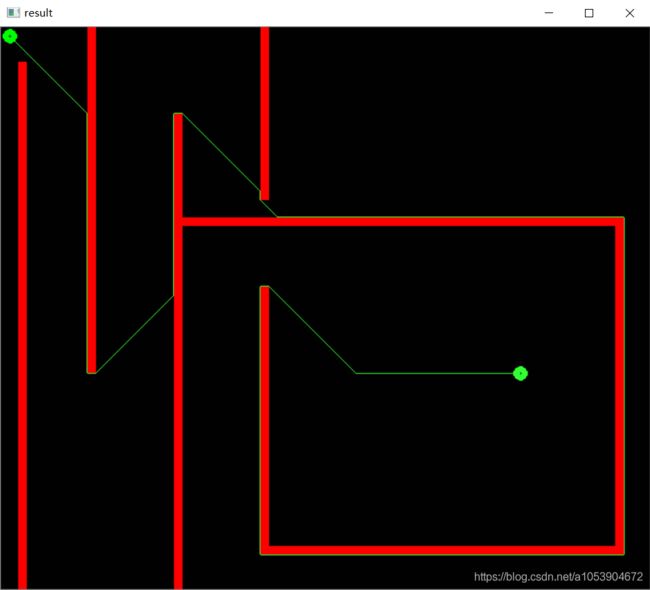
cv2.circle(maps, tuple(start.coord), 5, (0, 255, 0), 5)
cv2.circle(maps, tuple(end.coord), 5, (255, 0, 0), 5)
maps[maps[:, :, 0] == default_set_path] = 50, 255, 50
maps[maps[:, :, 0] == default_bar_value] = 0, 0, 255
cv2.imshow("result", maps)
cv2.waitKey()
cv2.destroyAllWindows()
需要注意的这里为了提高性能,省去了一些步骤,所以个标准的算法略微区别
一下是c++的实现:
// dllmain.cpp : 定义 DLL 应用程序的入口点。
#include "pch.h"
#include
#include
#include
#include
using namespace std;
struct Coord
{
int x;
int y;
bool operator==(const Coord& c) {
return x == c.x && y == c.y;
}
Coord() {
x = 0;
y = 0;
}
Coord(int x, int y) {
this->x = x;
this->y = y;
}
};
struct Point
{
int x;
int y;
Point* next;
Point(int x, int y) {
this->x = x;
this->y = y;
next = nullptr;
}
};
struct Node
{
Coord coord;
Node* parent;
int g;
int h;
int f;
Node(Coord coord) {
this->coord.x = coord.x;
this->coord.y = coord.y;
this->parent = 0;
this->g = 0;
this->h = 0;
this->f = 0;
}
Node(Coord coord, Node* parent) {
this->coord.x = coord.x;
this->coord.y = coord.y;
this->parent = parent;
this->g = 0;
this->h = 0;
this->f = 0;
}
Node(Coord coord, Node* parent, int g, int h) {
this->coord.x = coord.x;
this->coord.y = coord.y;
this->parent = parent;
this->g = g;
this->h = h;
this->f = g + h;
}
};
class HeapCompare_f
{
public:
bool operator() (const Node* x, const Node* y) const
{
return x->f > y->f;
}
};
class AStar
{
public:
int* world_map;
int width;
int height;
int bar_value;
int direct_cost;
int oblique_cost;
int set_path_value;
Node** neighbors;
Node** map_cache;
vector open_ls;
vector close_ls;
AStar(int* world_map, int width, int height, int bar_value, int dircect_cost, int oblique_cost, int set_path_value);
~AStar();
Node* new_node(Node* parent, Coord end, int x, int y, int cost);
void get_neighbors(Node* parent, Coord coord);
Point* find_path(Coord start, Coord end);
void free_ls();
};
AStar::AStar(int* world_map, int width, int height, int bar_value, int direct_cost, int oblique_cost, int set_path_value)
{
this->world_map = world_map;
this->width = width;
this->height = height;
this->bar_value = bar_value;
this->direct_cost = direct_cost;
this->oblique_cost = oblique_cost;
this->map_cache = new Node * [(size_t)width * (size_t)height];
this->neighbors = new Node * [8];
this->set_path_value = set_path_value;
}
AStar::~AStar()
{
delete[] map_cache;
delete[] neighbors;
}
Node* AStar::new_node(Node* parent, Coord end, int x, int y, int cost)
{
if (x < 0 || x >= width || y < 0 || y >= height)
{
return nullptr;
}
if (world_map[y * width + x] >= bar_value) {
return nullptr;
}
int H = abs(end.x - x) * direct_cost + abs(end.y - y) * direct_cost;
int G = parent->g + cost;
Node* node = new Node(Coord(x, y), parent, G, H);
return node;
}
void AStar::get_neighbors(Node* parent, Coord end)
{
Coord cd = parent->coord;
Node* up, * down, * left, * right, * left_up, * right_up, * left_down, * right_down;
up = new_node(parent, end, cd.x, cd.y - 1, direct_cost);
down = new_node(parent, end, cd.x, cd.y + 1, direct_cost);
left = new_node(parent, end, cd.x - 1, cd.y, direct_cost);
right = new_node(parent, end, cd.x + 1, cd.y, direct_cost);
left_up = new_node(parent, end, cd.x - 1, cd.y - 1, oblique_cost);
right_up = new_node(parent, end, cd.x + 1, cd.y - 1, oblique_cost);
left_down = new_node(parent, end, cd.x - 1, cd.y + 1, oblique_cost);
right_down = new_node(parent, end, cd.x + 1, cd.y + 1, oblique_cost);
neighbors[0] = up;
neighbors[1] = down;
neighbors[2] = left;
neighbors[3] = right;
neighbors[4] = left_up;
neighbors[5] = right_up;
neighbors[6] = left_down;
neighbors[7] = right_down;
}
void AStar::free_ls() {
typename vector< Node* >::iterator iter_node;
for (iter_node = open_ls.begin(); iter_node != open_ls.end(); iter_node++)
{
//if (*iter_node != nullptr)
delete (*iter_node);
}
for (iter_node = close_ls.begin(); iter_node != close_ls.end(); iter_node++)
{
//if (*iter_node != nullptr)
delete (*iter_node);
}
open_ls.clear();
close_ls.clear();
}
Point* AStar::find_path(Coord start, Coord end)
{
memset(map_cache, 0, (size_t)width * (size_t)height);
Node* start_node = new Node(start);
open_ls.push_back(start_node);
make_heap(open_ls.begin(), open_ls.end(), HeapCompare_f());
push_heap(open_ls.begin(), open_ls.end(), HeapCompare_f());
map_cache[start.y * width + start.x] = start_node;
Node* cur_node = nullptr;
while (true)
{
if (open_ls.empty()) {
printf("failed.\n");
break;
}
cur_node = open_ls.front();
pop_heap(open_ls.begin(), open_ls.end(), HeapCompare_f());
open_ls.pop_back();
if (cur_node->coord == end) {
printf("success.\n");
break;
}
get_neighbors(cur_node, end);
for (size_t i = 0; i < 8; i++)
{
Node* node = neighbors[i];
if (node == nullptr) continue;
Node** cache_node = &map_cache[node->coord.y * width + node->coord.x];
if (*cache_node != 0)
{
delete node;
continue;
}
open_ls.push_back(node);
push_heap(open_ls.begin(), open_ls.end(), HeapCompare_f());
*cache_node = node; //map_cache[node->coord.y * width + node->coord.x] = node;
}
close_ls.push_back(cur_node);
map_cache[cur_node->coord.y * width + cur_node->coord.x] = cur_node;
}
Point* last = nullptr;
if (cur_node == nullptr) goto end;
last = new Point(cur_node->coord.x, cur_node->coord.y); //printf("x:%d,y:%d\n", cur_node->coord.x, cur_node->coord.y);
while (true)
{
if (set_path_value > 0)
world_map[cur_node->coord.y * width + cur_node->coord.x] = set_path_value;
cur_node = cur_node->parent;
if (!cur_node) { break; }
Point* t = new Point(cur_node->coord.x, cur_node->coord.y); //printf("x:%d,y:%d\n", cur_node->coord.x, cur_node->coord.y);
t->next = last;
last = t;
}
end:
free_ls();
return last;
}
extern "C" {
__declspec(dllexport)int CreateAStar(int* world_map, int width, int height, int bar_value, int direct_cost, int oblique_cost, int set_path_value);
__declspec(dllexport)Point* FindPath(int id, int start_x, int start_y, int end_x, int end_y);
__declspec(dllexport)void AStarFree(int id);
__declspec(dllexport)void free_node_ls(Point** node_var);
}
#define MAX_NUMS 64
AStar* FINDER_OBJ_LIST[MAX_NUMS];
int CUR_INDEX = 0;
int CreateAStar(int* world_map, int width, int height, int bar_value, int direct_cost, int oblique_cost, int set_path_value) {
std::cout << "Hello CreateAStar!\n";
if (CUR_INDEX >= MAX_NUMS)
CUR_INDEX = 0;
int id = CUR_INDEX;
if ( FINDER_OBJ_LIST[CUR_INDEX]!=0 )
{
int i= MAX_NUMS;
for (i = 0; i < MAX_NUMS; i++)
{
if (FINDER_OBJ_LIST[i] == 0)
break;
}
if (i != MAX_NUMS){
CUR_INDEX = i;
}
else {
delete FINDER_OBJ_LIST[CUR_INDEX];
}
}
FINDER_OBJ_LIST[CUR_INDEX] = new AStar(world_map, width, height, bar_value, direct_cost, oblique_cost, set_path_value);
CUR_INDEX++;
return id;
}
Point* FindPath(int id,int start_x,int start_y,int end_x,int end_y) {
if (id > MAX_NUMS || id < 0) return 0;
auto a = FINDER_OBJ_LIST[id];
if (a == 0) return 0;
std::cout << "Hello FindPath!\n";
return a->find_path(Coord(start_x, start_y), Coord(end_x, end_y));
}
void AStarFree(int id) {
if (id > MAX_NUMS||id<0) return;
auto a = FINDER_OBJ_LIST[id];
if (a == 0) return;
std::cout << "Hello AStarFree!\n";
delete a;
FINDER_OBJ_LIST[id] = 0;
}
void free_node_ls(Point** node_var) {
Point* node = *node_var;
Point* next;
for (;;)
{
if (!node)
break;
next = node->next;
delete node;
node = next;
//printf("free\n");
}
//if (node) {
*node_var = 0;
//}
}
int main()
{
int MAP_WIDTH = 20;
int MAP_HEIGHT = 20;
int BarValue = 9;
int AreaValue = 1;
int direct_cost = 10;
int oblique_cost = 14;
int is_direction = 0;
int map[] = {
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, // 00
1, 9, 9, 9, 9, 9, 9, 9, 9, 9, 9, 9, 9, 9, 9, 9, 9, 9, 9, 1, // 01
1, 9, 9, 1, 1, 9, 9, 9, 1, 9, 1, 9, 1, 9, 1, 9, 9, 9, 1, 1, // 02
1, 9, 9, 1, 1, 9, 9, 9, 1, 9, 1, 9, 1, 9, 1, 9, 9, 9, 1, 1, // 03
1, 9, 1, 1, 1, 1, 9, 9, 1, 9, 1, 9, 1, 1, 1, 1, 9, 9, 1, 1, // 04
1, 9, 1, 1, 9, 1, 1, 1, 1, 9, 1, 1, 1, 1, 9, 1, 1, 1, 1, 1, // 05
1, 9, 9, 9, 9, 1, 1, 1, 1, 1, 1, 9, 9, 9, 9, 1, 1, 1, 1, 1, // 06
1, 9, 9, 9, 9, 9, 9, 9, 9, 1, 1, 1, 9, 9, 9, 9, 9, 9, 9, 1, // 07
1, 9, 1, 1, 1, 1, 1, 1, 1, 1, 1, 9, 1, 1, 1, 1, 1, 1, 1, 1, // 08
1, 9, 1, 9, 9, 9, 9, 9, 9, 9, 1, 1, 9, 9, 9, 9, 9, 9, 9, 1, // 09
1, 9, 1, 1, 1, 1, 9, 1, 1, 9, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, // 10
1, 9, 9, 9, 9, 9, 1, 9, 1, 9, 1, 9, 9, 9, 9, 9, 1, 1, 1, 1, // 11
1, 9, 1, 9, 1, 9, 9, 9, 1, 9, 1, 9, 1, 9, 1, 9, 9, 9, 1, 1, // 12
1, 9, 1, 9, 1, 9, 9, 9, 1, 9, 1, 9, 1, 9, 1, 9, 9, 9, 1, 1, // 13
1, 9, 1, 1, 1, 1, 9, 9, 1, 9, 1, 9, 1, 1, 1, 1, 9, 9, 1, 1, // 14
1, 9, 1, 1, 9, 1, 1, 1, 1, 9, 1, 1, 1, 1, 9, 1, 1, 1, 1, 1, // 15
1, 9, 9, 9, 9, 1, 1, 1, 1, 1, 1, 9, 9, 9, 9, 1, 1, 1, 1, 1, // 16
1, 1, 9, 9, 9, 9, 9, 9, 9, 1, 1, 1, 9, 9, 9, 1, 9, 9, 9, 9, // 17
1, 9, 1, 1, 1, 1, 1, 1, 1, 1, 1, 9, 1, 1, 1, 1, 1, 1, 1, 1, // 18
1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, // 19
};
AStar a = AStar(map, MAP_WIDTH, MAP_HEIGHT, BarValue, direct_cost, oblique_cost, 7);
a.find_path(Coord(0, 0), Coord(3, 3));
for (int i = 0; i < MAP_HEIGHT; i++)
{
for (int j = 0; j < MAP_WIDTH; j++)
{
printf("%d ", map[i * MAP_WIDTH + j]);
}
cout << endl;
}
}
BOOL APIENTRY DllMain( HMODULE hModule,
DWORD ul_reason_for_call,
LPVOID lpReserved
)
{
switch (ul_reason_for_call)
{
case DLL_PROCESS_ATTACH:
case DLL_THREAD_ATTACH:
case DLL_THREAD_DETACH:
case DLL_PROCESS_DETACH:
break;
}
return TRUE;
}
c++的实现包好了 导出为 dll,以及测试
效果图如下: