OpenCV第七篇:车牌识别

1.调整图片大小,并获取灰度图
import cv2
if __name__ == '__main__':
img = cv2.imread('2.jpeg')
# 调整图片大小
img = cv2.resize(img, (620, 480))
# 灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 显示效果
cv2.imshow('original', img)
cv2.waitKey(0)
cv2.destroyAllWindows()

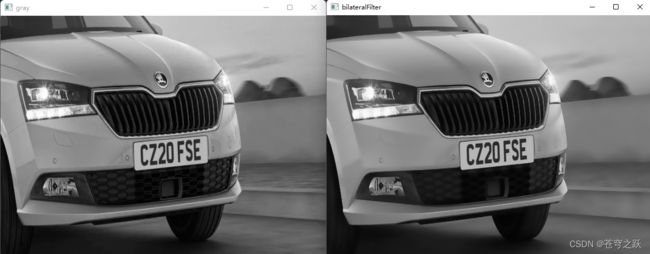
2.双边滤波去除噪音:cv2.bilateralFilter()。
import cv2
if __name__ == '__main__':
img = cv2.imread('2.jpeg')
# 调整图片大小
img = cv2.resize(img, (620, 480))
# 灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 双边滤波
gray1 = cv2.bilateralFilter(gray, 13, 15, 15)
# 显示效果
cv2.imshow('gray', gray)
cv2.imshow('bilateralFilter', gray1)
cv2.waitKey(0)
cv2.destroyAllWindows()
3.边缘检测:cv2.Canny(image,threshold1,threshold2)
仅显示强度梯度大于最小阈值threshold1且小于最大阈值threshold2的边缘。
import cv2
if __name__ == '__main__':
img = cv2.imread('2.jpeg')
# 调整图片大小
img = cv2.resize(img, (620, 480))
# 灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 双边滤波
gray = cv2.bilateralFilter(gray, 13, 15, 15)
# 边缘检测
edged = cv2.Canny(gray, 30, 200)
# 显示效果
cv2.imshow('gray', gray)
cv2.imshow('edged', edged)
cv2.waitKey(0)
cv2.destroyAllWindows()

4.寻找轮廓:车牌(四边形)
pip install imutilsimport cv2
import imutils
if __name__ == '__main__':
img = cv2.imread('2.jpeg')
# 调整图片大小
img = cv2.resize(img, (620, 480))
# 灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 双边滤波
gray = cv2.bilateralFilter(gray, 13, 15, 15)
# 边缘检测
edged = cv2.Canny(gray, 30, 200)
# 寻找轮廓(图像矩阵,输出模式,近似方法)
contours = cv2.findContours(edged.copy(), cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 配合上面一句使用:用来兼容cv2和cv3
contours = imutils.grab_contours(contours)
# 根据区域大小排序取前十个
contours = sorted(contours, key=cv2.contourArea, reverse=True)[:10]
screenCnt = None
# 遍历轮廓,找到车牌轮廓
for c in contours:
# 计算轮廓周长(轮廓,是否闭合)
peri = cv2.arcLength(c, True)
# 折线化(轮廓,阈值(越小越接近曲线),是否闭合)返回折线顶点坐标
approx = cv2.approxPolyDP(c, 0.018 * peri, True)
# 获取四个顶点(即四边形)
if len(approx) == 4:
screenCnt = approx
break
# 如果找到了四边形
if screenCnt is not None:
# 根据四个顶点坐标对img画线(图像矩阵,轮廓坐标集,轮廓索引,颜色,线条粗细)
cv2.drawContours(img, [screenCnt], -1, (0, 0, 255), 3)
# 显示效果
cv2.imshow('img', img)
cv2.imshow('gray', gray)
cv2.imshow('edged', edged)
cv2.waitKey(0)
cv2.destroyAllWindows()
 5.图像位运算进行遮罩
5.图像位运算进行遮罩
import cv2
import imutils
import numpy as np
if __name__ == '__main__':
img = cv2.imread('2.jpeg')
# 调整图片大小
img = cv2.resize(img, (620, 480))
# 灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 双边滤波
gray = cv2.bilateralFilter(gray, 13, 15, 15)
# 边缘检测
edged = cv2.Canny(gray, 30, 200)
"""寻找轮廓(图像矩阵,输出模式,近似方法)"""
contours = cv2.findContours(edged.copy(), cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 配合上面一句使用:用来兼容cv2和cv3
contours = imutils.grab_contours(contours)
# 根据区域大小排序取前十个
contours = sorted(contours, key=cv2.contourArea, reverse=True)[:10]
screenCnt = None
# 遍历轮廓,找到车牌轮廓
for c in contours:
# 计算轮廓周长(轮廓,是否闭合)
peri = cv2.arcLength(c, True)
# 折线化(轮廓,阈值(越小越接近曲线),是否闭合)返回折线顶点坐标
approx = cv2.approxPolyDP(c, 0.018 * peri, True)
# 获取四个顶点(即四边形)
if len(approx) == 4:
screenCnt = approx
break
# 如果找到了四边形
if screenCnt is not None:
# 根据四个顶点坐标对img画线(图像矩阵,轮廓坐标集,轮廓索引,颜色,线条粗细)
cv2.drawContours(img, [screenCnt], -1, (0, 0, 255), 3)
"""遮罩"""
# 创建一个灰度图一样大小的图像矩阵
mask = np.zeros(gray.shape, np.uint8)
# 将创建的图像矩阵的车牌区域画成白色
cv2.drawContours(mask, [screenCnt], 0, 255, -1, )
# 图像位运算进行遮罩
new_image = cv2.bitwise_and(img, img, mask=mask)
# 显示效果
cv2.imshow('img', img)
cv2.imshow('gray', gray)
cv2.imshow('edged', edged)
cv2.imshow('new_image', new_image)
cv2.waitKey(0)
cv2.destroyAllWindows()

6.图像剪裁
import cv2
import imutils
import numpy as np
if __name__ == '__main__':
img = cv2.imread('2.jpeg')
# 调整图片大小
img = cv2.resize(img, (620, 480))
# 灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 双边滤波
gray = cv2.bilateralFilter(gray, 13, 15, 15)
# 边缘检测
edged = cv2.Canny(gray, 30, 200)
"""寻找轮廓(图像矩阵,输出模式,近似方法)"""
contours = cv2.findContours(edged.copy(), cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 配合上面一句使用:用来兼容cv2和cv3
contours = imutils.grab_contours(contours)
# 根据区域大小排序取前十个
contours = sorted(contours, key=cv2.contourArea, reverse=True)[:10]
screenCnt = None
# 遍历轮廓,找到车牌轮廓
for c in contours:
# 计算轮廓周长(轮廓,是否闭合)
peri = cv2.arcLength(c, True)
# 折线化(轮廓,阈值(越小越接近曲线),是否闭合)返回折线顶点坐标
approx = cv2.approxPolyDP(c, 0.018 * peri, True)
# 获取四个顶点(即四边形)
if len(approx) == 4:
screenCnt = approx
break
# 如果找到了四边形
if screenCnt is not None:
# 根据四个顶点坐标对img画线(图像矩阵,轮廓坐标集,轮廓索引,颜色,线条粗细)
cv2.drawContours(img, [screenCnt], -1, (0, 0, 255), 3)
"""遮罩"""
# 创建一个灰度图一样大小的图像矩阵
mask = np.zeros(gray.shape, np.uint8)
# 将创建的图像矩阵的车牌区域画成白色
cv2.drawContours(mask, [screenCnt], 0, 255, -1, )
# 图像位运算进行遮罩
new_image = cv2.bitwise_and(img, img, mask=mask)
"""图像剪裁"""
# 获取车牌区域的所有坐标点
(x, y) = np.where(mask == 255)
# 获取底部顶点坐标
(topx, topy) = (np.min(x), np.min(y))
# 获取底部坐标
(bottomx, bottomy,) = (np.max(x), np.max(y))
# 剪裁
Cropped = gray[topx:bottomx, topy:bottomy]
# 显示效果
cv2.imshow('img', img)
cv2.imshow('gray', gray)
cv2.imshow('edged', edged)
cv2.imshow('Cropped', Cropped)
cv2.waitKey(0)
cv2.destroyAllWindows()

7.字符识别:OCR
import cv2
import imutils
import numpy as np
if __name__ == '__main__':
img = cv2.imread('2.jpeg')
# 调整图片大小
img = cv2.resize(img, (620, 480))
# 灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 双边滤波
gray = cv2.bilateralFilter(gray, 13, 15, 15)
# 边缘检测
edged = cv2.Canny(gray, 30, 200)
"""寻找轮廓(图像矩阵,输出模式,近似方法)"""
contours = cv2.findContours(edged.copy(), cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 配合上面一句使用:用来兼容cv2和cv3
contours = imutils.grab_contours(contours)
# 根据区域大小排序取前十个
contours = sorted(contours, key=cv2.contourArea, reverse=True)[:10]
screenCnt = None
# 遍历轮廓,找到车牌轮廓
for c in contours:
# 计算轮廓周长(轮廓,是否闭合)
peri = cv2.arcLength(c, True)
# 折线化(轮廓,阈值(越小越接近曲线),是否闭合)返回折线顶点坐标
approx = cv2.approxPolyDP(c, 0.018 * peri, True)
# 获取四个顶点(即四边形)
if len(approx) == 4:
screenCnt = approx
break
# 如果找到了四边形
if screenCnt is not None:
# 根据四个顶点坐标对img画线(图像矩阵,轮廓坐标集,轮廓索引,颜色,线条粗细)
cv2.drawContours(img, [screenCnt], -1, (0, 0, 255), 3)
"""遮罩"""
# 创建一个灰度图一样大小的图像矩阵
mask = np.zeros(gray.shape, np.uint8)
# 将创建的图像矩阵的车牌区域画成白色
cv2.drawContours(mask, [screenCnt], 0, 255, -1, )
# 图像位运算进行遮罩
new_image = cv2.bitwise_and(img, img, mask=mask)
"""图像剪裁"""
# 获取车牌区域的所有坐标点
(x, y) = np.where(mask == 255)
# 获取底部顶点坐标
(topx, topy) = (np.min(x), np.min(y))
# 获取底部坐标
(bottomx, bottomy,) = (np.max(x), np.max(y))
# 剪裁
Cropped = gray[topx:bottomx, topy:bottomy]
"""OCR识别"""
text = pytesseract.image_to_string(Cropped, config='--psm 11')
print("车牌结果:", text)
# 显示效果
cv2.imshow('img', img)
cv2.imshow('gray', gray)
cv2.imshow('edged', edged)
cv2.imshow('new_image', Cropped)
cv2.waitKey(0)
cv2.destroyAllWindows()
