单片机知识
文章目录
- 单片机硬件结构:
-
- 低功耗电模式
- FPGA
- 看门狗
-
- 看门狗分类
- 单工
- USB和串口的区
- I2C
- SPI协议
- 单片机如何通过串口与上位机传递信息
- CSI接口
单片机硬件结构:
以QT89S51单片机为例:
片内功能组件:
(1)8位微处理器(CPU)
(2)数据存储器(1288 RAM)
(3)程序存储器(4KB Flash ROM)
(4)4个8位并行I/O口
(5)1个全双工异步串口
(6)2个16位定时器、计数器
(7)1个看门狗定时器
(8)中断系统:5个中断源、5个中断向量
(9)特殊功能寄存器(SFR)26个
(10)低功耗的空闲模式和掉电模式
(11)在线可编程功能ISP
(12)数据指针2个,方便对片外RAM访问
各功能部件通过片内单一总线连接而成,基本结构是CPU+外围芯片的传统微机结构,CPU对各种功能部件控制采用特殊功能寄存器(SFR)的集中控制方式。
端口:等
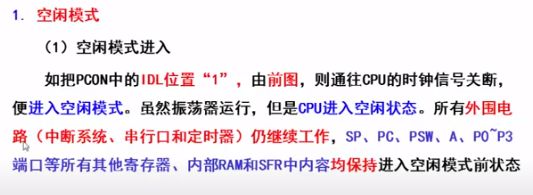
低功耗电模式
节电工作模式:空闲模式、掉电保持模式(VCC可由后备电源供电)


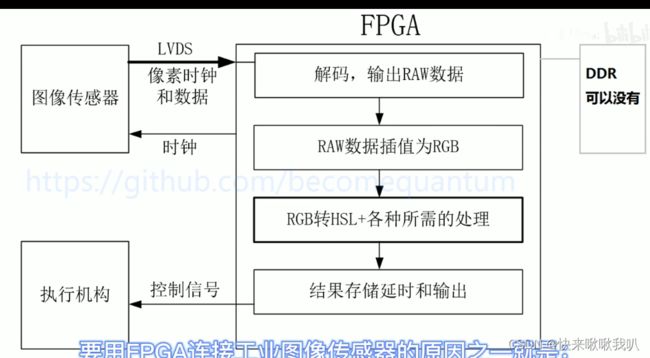
FPGA
详解串行通信协议及其FPGA实现述
FPGA(Field Programmable Gate Array),现场可编程门阵列,一种以数字电路为主的集成芯片,可编程逻辑器件PLD的一种。
集成电路,一些元件连接在一起,使它具有一定功能。而分成通用集成电路、专用集成电路。



Youtube关于Introduction to FPGA
编译原理:抽象语法树、
警告编译器的词法分析、语法分析等阶段生成树状结构的抽象语法树(AST),该语法树的每一个节点都对应着代码当中不同含义的片段。
解释器:
解释器是在运行时运行的语言求值器,它动态地执行程序的源代码。 解释器解析源代码,从源代码生成 AST(抽象语法树),遍历 AST 并逐个计算它们。

词法分析、语法分析
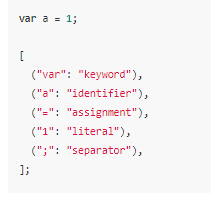
将词法分析阶段生成的 Token 转换为抽象语法树(Abstract Syntax Tree),这一过程称之为语法解析(Parsing)。

看门狗
在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成各种寄存器和内存的数据混乱,会导致程序指针错误,不在程序区,取出错误的程序指令等,都有可能会陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续正常工作,导致整个系统的陷入停滞状态,发生不可预料的后果。
看门狗,又叫 watchdog,从本质上来说就是一个定时器电路,一般有一个输入和一个输出,其中输入叫做喂狗,输出一般连接到另外一个部分的复位端,一般是连接到单片机。 看门狗的功能是定期的查看芯片内部的情况,一旦发生错误就向芯片发出重启信号。看门狗命令在程序的中断中拥有最高的优先级。
看门狗,又叫watchdog timer,是一个定时器电路,一般有一个输入,叫喂狗(kicking the dog/service the dog),一个输出到MCU的RST端,MCU正常工作的时候,每隔一段时间输出一个信号到喂狗端,给 WDT清零,如果超过规定的时间不喂狗(一般在程序跑飞时),WDT定时超过,就会给出一个复位信号到MCU,使MCU复位。防止MCU死机. 看门狗的作用就是防止程序发生死循环,或者说程序跑飞。
看门狗是一种监控系统的运行状况的手段,通过软硬件结合的方式实现对系统运行状况的监控。稳定运行的软件会在执行完特定指令后进行喂狗,若在一定周期内看门狗没有收到来自软件的喂狗信号,则认为系统故障,会进入中断处理程序或强制系统复位。系统上电后根据不同的工作模式可以选择使能看门狗的时机,若看门狗被使能则计数器开始计数,如果在设定的时间内没有及时喂狗则会发生看门狗超时。
看门狗主要由寄存器、计数器和狗叫模块构成:通过寄存器对看门狗进行基本设置,计数器计算狗叫时间,狗叫模块决定看门狗超时后发出的中断或复位方式。
看门狗分类
硬件看门狗
硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在定时时间到之前对定时器进行复位。如果出现死循环,或者说PC指针不能回来,那么定时时间到后就会使单片机复位。常用的WDT芯片如MAX813,5045,IMP 813等。
软件看门狗
而在某些情况下,也会采用纯软件的方法来设置看门狗,如在单片机系统中,利用闲置的定时器/计数器就可以设计一个软件看门狗。具体实现步骤如下:
首先,在初始化程序中设置定时器/计数器的方式以控制寄存器(TMOD) 和定时时间的初值,并且打开中断。
然后,根据定时器的时间,在主程序中按一定的时间间隔插入复位定时器的指令(喂狗), 两条喂狗指令之间的时间间隔可以根据系统时钟与指令周期计算出来,而且该时间周期应该小于定时器的定时时间。
最后,在定时器的中断服务程序中,设置一条无条件转移指令,将程序计数器PC转移到初始化程序的入口。
在非单片机系统,如PowerPC系统中,也可以采用多线程的方式来设置软件狗,其主要的步骤如下所述:
首先,新建一个看门狗线程,该线程维护一个全局变量数组,该数组相当于每个工作线程的计数器。看门狗线程为一一个死循环,每隔一段时间就会循环一次,并将全局变量数组的每一个值都加1后判断是否超过预定义的上限值,若发现某个线程对应的变量数值超过最大值,则看门狗线程会重置该线程。
然后,每个工作线程中,每隔一段时间就会将对应的全局变量置0 (喂狗)。
软件看门狗的优点是无需额外的硬件支持,但当系统存在严重的错误时(例如:中断服务出错),则有可能导致软件看门狗失效。
(公司内容)
模块都用消息队列的方式传递数据,各个人物对于共享资源的访问采用信号的方式进行同步和锁定。对于单个模块,可以将系统中大量并发事件通过消息队列进行排队处理。串行方法处理并发事件。
单工
单工
单工,即数据传输只在一个方向上传输,只能你给我发送或者我给你发送,方向是固定的,不能实现双向通信,如:室外天线电视、调频广播等。
半双工
半双工比单工先进一点,传输方向可以切换,允许数据在两个方向上传输,但是某个时刻,只允许数据在一个方向上传输,可以基本双向通信,如:对讲机,IIC通信。
全双工
比半双工更先进的是全双工,允许数据同时在两个方向传输。发送和接收完全独立,在发送的同时可以接收信号,或者在接收的同时可以发送。它要求发送和接收设备都要有独立的发送和接收能力,如:电话通信,SPI通信,串口通信。
同步和异步的区别
串行通信可以分为两种类型,一种叫同步通信,另一种叫异步通信。
简单的说,就是同步通信需要时钟信号,而异步通信不需要时钟信号。
同步:发送方发出数据后,等接收方发回响应以后才发下一个数据包的通讯方式。
异步:发送方发出数据后,不等接收方发回响应,接着发送下个数据包的通讯方式。
SPI和IIC为同步通信,UART为异步通信,而USART为同步&异步通信。
USART:通用同步和异步收发器
UART:通用异步收发器
即USART支持同步和异步收发,而UART只支持异步收发。
如STM32的串口工作在同步模式时,即智能卡模式时,就需要连接同步时钟引脚。
USB和串口的区
串行接口:串行接口简称串口,也称串行通信接口或串行通讯接口(通常指COM接口),是采用串行通信方式的扩展接口。串行接口 (Serial Interface) 是指数据一位一位地顺序传送,其特点是通信线路简单,只要一对传输线就可以实现双向通信(可以直接利用电话线作为传输线),从而大大降低了成本,特别适用于远距离通信,但传送速度较慢。
USB,是英文Universal Serial Bus(通用串行总线)的缩写,是一个外部总线标准,用于规范电脑与外部设备的连接和通讯。是应用在PC领域的接口技术。USB接口支持设备的即插即用和热插拔功能。
USB有二种传输速率,第一种是全速模式,第二种则是低速模式
I2C
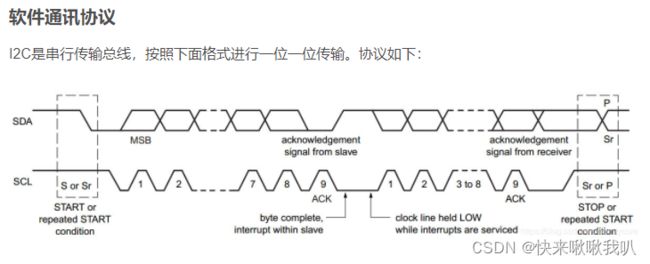

一文看懂I2C协议
I2C基础
SPI协议
SPI协议详解
单片机如何通过串口与上位机传递信息
单片机与串口助手交互,串口助手与上位机交互


CSI接口
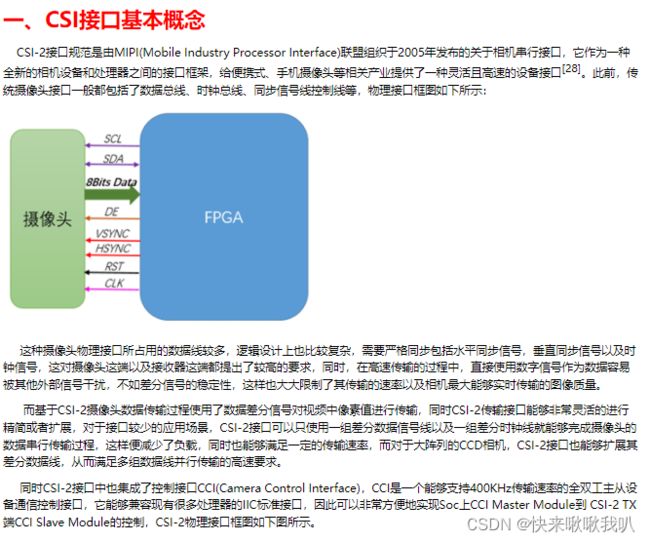
CSI(Camera Serial Interface)是由MIPI(Mobile Industry Processor Interface)联盟下Camera工作组制定的接口标准,是MIPI联盟发起的为移动应用处理器制定的开放标准,该协议为低成本智能手机细分市场提供了一套灵活的、高性价比的解决方案。CSI接口具有接口少、抗EMI强、速度快、功耗低等优点。CSI-2是MIPICSI第二版,CSI-2由应用层、协议层、物理层组成,最大支持4通道数据传输,单线传输速度高达1Gb/s[1-2]。
CMOS Sensor Interface(csi)