MDP模型之Grid World(Q Learining方法)
本次博客依然是伯克利大学的Grid World作业,对应的是Question 6和Question 7。
目录
-
-
- 1. 值迭代的局限性
- 2. Q Learning是怎么做的
- 3. 在Grid World 使用 Q Learning
- 4. 改进方法:Epsilon Greedy
- 5. 参考资料
-
上次的作业“MDP模型之Grid World(值迭代方法)”,链接为https://blog.csdn.net/weixin_42763696/article/details/105333539
在上一次的作业中,我们已经了解了如何使用值迭代方法求解Grid World,那么Q Learning方法又是什么呢?自然,Q Learning也是一种强化学习的方法,那么它和值迭代又有什么区别呢?这就要从两者的算法思路开始讲了。
1. 值迭代的局限性
首先让我们梳理一下值迭代的步骤
- 遍历每一个state(格子)
- 遍历当前state的每一个合法action(上下左右)
- 对执行action移动到的所有state’的reward进行求和
- 保存能获得最大reward的action,并将reward值记录在格子(state)上
强化学习作为一种算法,肯定是用来解决现实世界的问题的,但是在值迭代的算法步骤中,是有两步在现实中很难获取到的:
- 第一步:现实世界中,你不可能获得所有的状态,比如一个没有平面图的迷宫,每一条路都是陌生的。
- 第三步:现实世界中,到下一个状态的概率不可能是一个固定值,你永远不知道在吃完午饭后,下午上课老师点到你的概率是多少(
午饭state->执行吃饭action->被点名state')。
第三步还有补充的一点,就是现实生活中的action不可能是固定的上下左右,在午饭state我可以执行回宿舍action, 不吃饭action, 玩手机action, 学习action…等等无数种行动,并且无论执行哪个action,都无法知道被点名state'的概率。
这样看来,值迭代有很明显的局限性,为了用强化学习解决更多的问题,所引申出的算法就是Q Learning。
2. Q Learning是怎么做的
Q Learning采用的是一种不断试错方式学习,针对上面两步,Q Learning使用了下面的解决办法
- 计算的时候不会遍历所有的格子,只管当前状态,当前格子的reward值
- 不会计算所有action的reward,每次行动时,只选取一个action,只计算这一个action的reward
值迭代在计算reward的时候,会得到每个action的reward,并保留最大的。
而Q Learning在计算reward的时候,虽然也会每个action的reward,但会全部都保留下来。
Q Learning的公式如下:
q π ( s , a ) = q π ( s , a ) + α [ R + γ m a x a ′ q π ( s ′ , a ′ ) − q π ( s , a ) ] q_π(s,a) = q_π(s,a) + \alpha[R+\gamma \mathop{max}\limits_{a'}q_π(s',a')-q_π(s,a)] qπ(s,a)=qπ(s,a)+α[R+γa′maxqπ(s′,a′)−qπ(s,a)]
整理后得到
q π ( s , a ) = ( 1 − α ) q π ( s , a ) + α [ R + γ m a x a ′ q π ( s ′ , a ′ ) ] q_π(s,a) =(1 - \alpha) q_π(s,a) + \alpha[R+\gamma \mathop{max}\limits_{a'}q_π(s',a')] qπ(s,a)=(1−α)qπ(s,a)+α[R+γa′maxqπ(s′,a′)]
从前往后梳理一下公式:
-
q π ( s , a ) q_π(s,a) qπ(s,a)表示的是在s时执行a的reward值之和,包括了经验reward值和新的reward值的相加。
-
( 1 − α ) q π ( s , a ) (1 - \alpha)q_π(s,a) (1−α)qπ(s,a)表示的是经验reward,即
学习率*之前学习到的执行该action的reward。可以看到学习速率α越大,保留之前训练的效果就越少。 -
α [ R + γ m a x a ′ q π ( s ′ , a ′ ) ] \alpha[R+\gamma \mathop{max}\limits_{a'}q_π(s',a')] α[R+γa′maxqπ(s′,a′)]就是新的reward值了,下面逐步拆解。
-
γ m a x a ′ q π ( s ′ , a ′ ) \gamma \mathop{max}\limits_{a'}q_π(s',a') γa′maxqπ(s′,a′)是计算下一个state’中最大的reward值,这个称之为“记忆奖励”。因为在之前某次到达state’的时候,保存了四个方向(a’)的reward值,通过“回忆”,想起来自己之前在state’上能收获的最大好处,就可以直接影响在当前state时reward的计算。 γ \gamma γ是用来增加or减少state’的影响的, γ \gamma γ越大,智能体就会越重视以往经验,越小,就只重视眼前利益(R)。
-
R是执行了action后的reward,比如在终点处执行exit,获得+1/-1的reward。
接下来继续通过模拟的方式理解Q Learning的过程
3. 在Grid World 使用 Q Learning

接下来让我们向上走一步,走到(0,1):
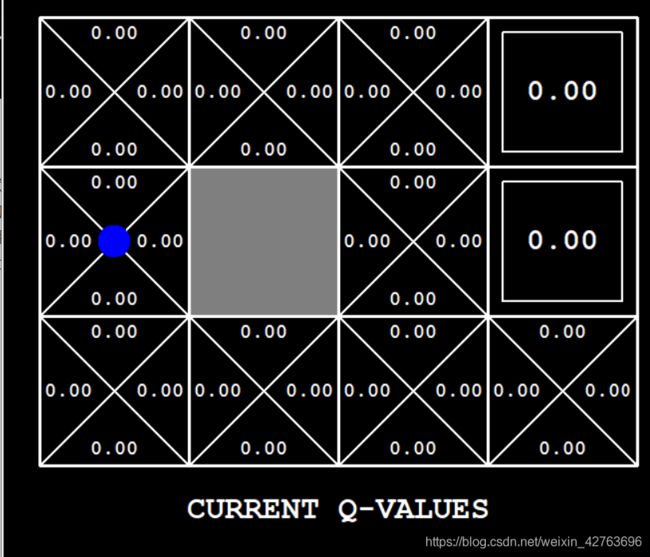
什么事情都没有发生,这是因为智能体在踩到下一个状态后,发现奖励值为0,因此没有任何值的更新。
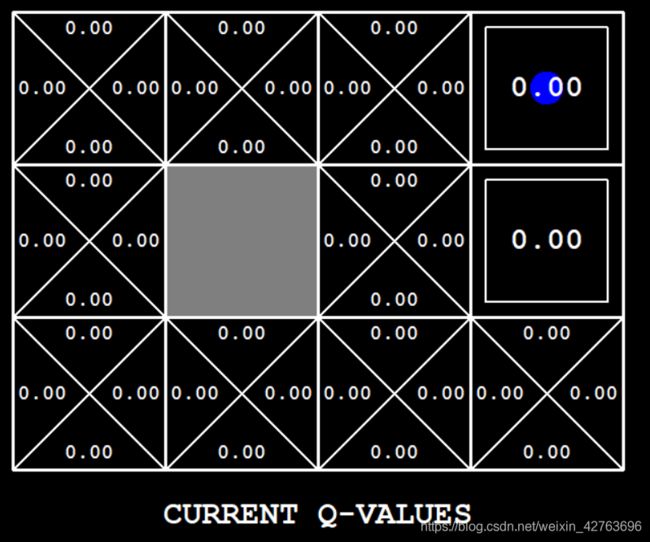
这种情况会一直保持下去,智能体继续向上走,并且右转弯

直到我走到了终点(3,2),执行下一步动作exit的时候,智能体能够获得的reward是1,也就是上述公式中R的值为1。
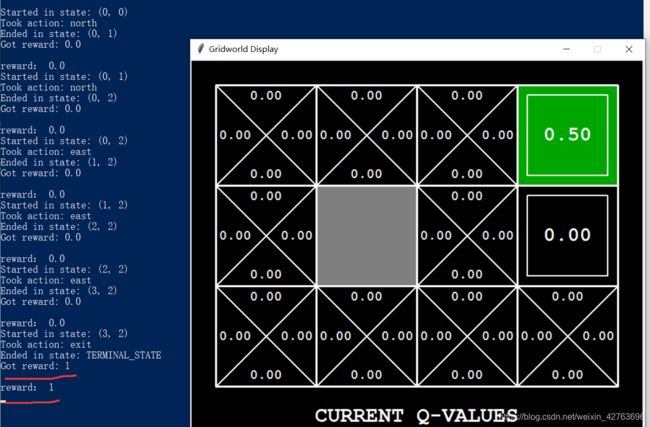
将学习率0.5带入公式,计算一下,由于这是第一次得到reward,没有任何之前的经验可以参考,因此所有的经验都为0,计算公式为:
q ( ( 3 , 2 ) , e x i t ) = ( 1 − 0.5 ) ∗ 0.0 + 0.5 [ 1 + 0.9 ∗ 0 ] = 0.5 q((3,2),exit) = ( 1 - 0.5 ) * 0.0 + 0.5[1 + 0.9*0] = 0.5 q((3,2),exit)=(1−0.5)∗0.0+0.5[1+0.9∗0]=0.5
这样智能体的第一次冒险就结束了,只计算出一个终点时exit动作的Q Value。
第二次让智能体走相同的路线,前几步由于reward值还是0,因此结果相同,直到倒数第二个格子(2,2)处


q ( ( 2 , 2 ) , e a s t ) = ( 1 − 0.5 ) ∗ 0.0 + 0.5 [ 0.0 + 0.9 ∗ 0.5 ] = 0.225 q((2,2),east) =( 1 - 0.5 ) * 0.0 + 0.5 [ 0.0 + 0.9 * 0.5 ] = 0.225 q((2,2),east)=(1−0.5)∗0.0+0.5[0.0+0.9∗0.5]=0.225
east就是向东、向右走,0.225经过四舍五入变成0.23,符合图7的结果。
在(3,2)处再执行exit动作后,结果为图8

计算过程如下
q ( ( 3 , 2 ) , e a s t ) = ( 1 − 0.5 ) ∗ 0.5 + 0.5 [ 1 + 0.9 ∗ 0 ] = 0.75 q((3,2),east) =( 1 - 0.5 ) * 0.5 + 0.5 [ 1 + 0.9 * 0 ] = 0.75 q((3,2),east)=(1−0.5)∗0.5+0.5[1+0.9∗0]=0.75
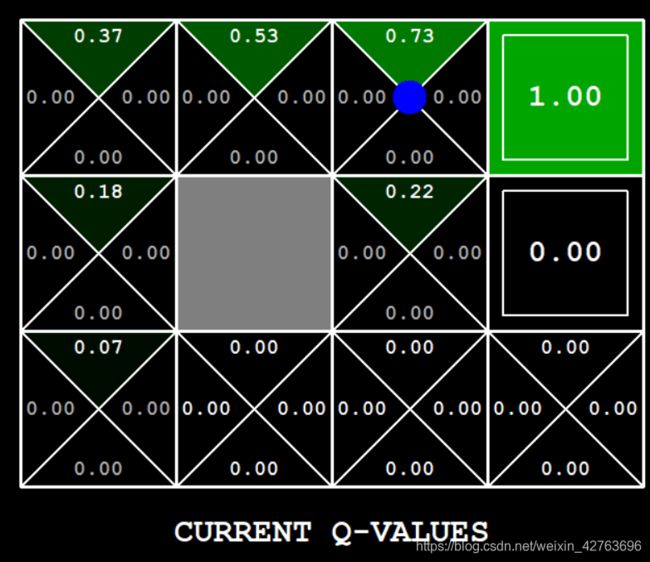
这样我们重复上述路径4次,最终得到图9的结果
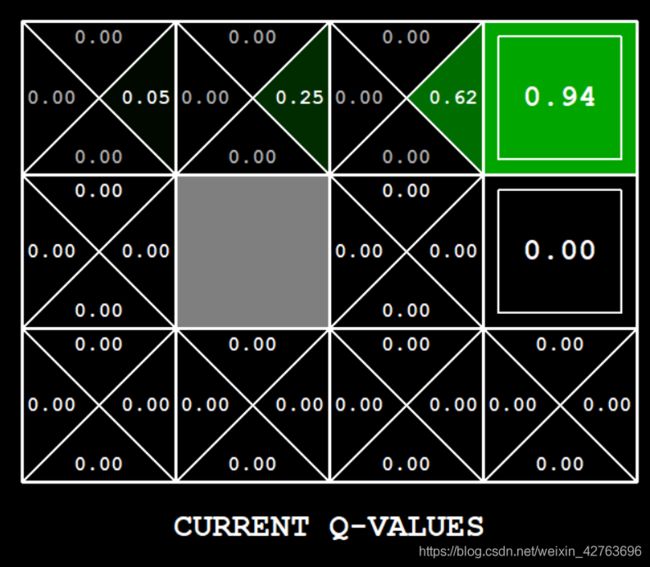
注意:上述的过程都是由人类在执行动作,每一步都是确定的,因此可以定向地先往上走再往右走。真正强化学习的时候是由智能体自主行动,每个格子的action选择最佳值,但这样会出现问题,这会在4中讲到
4. 改进方法:Epsilon Greedy
上述的算法看上去可以在每次动作都选择到最佳的动作,但在使用上述算法让智能体去学习Grid World的时候,会遇到图10的问题:
在Q Learning的方法中,我们选择每次reward最大的方向,这样就会陷入局部最优,即当向上的action的reward>0时,我就不会再去看别的方向的reward,即使向右走的reward要更大
这里的优化方法就是使用Epsilon Greedy,即以Epsilon的概率去选取reward最大的action,或者随机的action,代码如下:
r = random.random()
if r > epsilon:
# 得到reward最大的action
return computeActionFromQValues(state)
else:
# 返回随机选择的合法action之一
return random.choice(legalActions)
这样一来,学习到的结果就正常多了

完结,撒花~
5. 参考资料
- 知乎回答:https://www.zhihu.com/question/26408259
- csdn博客:https://blog.csdn.net/itplus/article/details/9361915