【可见光室内定位】(二)基于光电器件PD的可见光室内定位技术
目录
- 格物致知
-
- ⭕️ 可见光定位系统
-
- 定位方案
-
- 1️⃣ 几何定位法
- 2️⃣ 指纹分析法
- 3️⃣ 标签定位法
-
- - 原理
- - 具体流程
- - 采样信息
- ⭕️ 可见光通信系统
-
- 发射端
- 1. 编码方案
-
- 1️⃣ 基于UART串口通信的通信协议
- 2️⃣ 基于脉宽调制的通信协议
- 2. 调制方案(DAC)
-
- 1️⃣ PWM调制技术
- 2️⃣ OOK调制技术
- 3. 信道通信时序方案
-
- 1️⃣ 数字时分复用(TDM)
- 1、信号复用方式
- 接收端
- 4. 解调方案(ADC)
- 5. 滤波放大方案
- 6. 降噪方案
格物致知
⭕️ 可见光定位系统
定位方案
1️⃣ 几何定位法
利用参考点与目标点之间的几何关系确定位置信息。此种方法需要测量二者之间的信号强度、信号到达时间和角度关系,因此信息处理的过程较为复杂,对于外部环境也有较高的要求。
2️⃣ 指纹分析法
-
原理:指纹分析法是收集一个场景中每个采样点的位置指纹并保存在建立的指纹库中,将接收器实测采样到的可见光信号特征与位置指纹数据库中的指纹进行匹配,最终确定出目标的位置的方法。
-
采样信息:TOA、TDOA、RSS、AOA和其他测量值。
-
优点:避免几何测量的过程中易受干扰的弊端,利用查询的过程估计目标位置。因为指纹分析的位置指纹信息是提前进行采集的,故使用此方法定位会比三边定位法计算简单,系统响应速度快。
-
缺点:可移植性差,易受动态环境影响。环境变化会导致指纹数据库要及时更新,带来额外的人力物力消耗。
-
匹配算法:贝叶斯概率法、k近邻法和神经网络。
3️⃣ 标签定位法
参考文献:
2、基于可见光-标识点的智能车室内定位及避障
3、基于LED标签技术的室内可见光定位系统研究
- 原理
1️⃣ 系统将应用于定位的LED光源进行标号编码,不同的标号对应室内环境中不同的位置,每个LED光源都循环发送唯一的位置信息。当移动终端移动到指定的区域时,通过探测器将采集到可见光信号并转换为电信号,经过滤波放大后通过stm32处理器对信息进行解码。接收端收到加载着位置信息的可见光信号后进行定位信息的解析和映射
2️⃣ 在传统的标签技术的基础上通过接收能量的强弱来逐渐缩小目标定位范围进而达到提高定位精度的目的,这种定位方式原理简单、系统复杂度低且容易实现,亦可满足一般条件下的室内定位需求。
- 具体流程
(1)将每盏 LED 灯都规定唯一的编号 A、B、C,分别对应室内空间中的不同位置坐标;
(2)光源使用时分复用的方式,向空间内循环不间断地发送加载在 LED 灯上的位置信息;
(3)在移动过程中的智能车上的接收端,采集到上方发送的光信号,将其转化为电信号后,进行滤波模块、信号放大模块、判决再生模块的一系列处理;
(4)根据在当前位置接收到处理之后的位置信息,确定智能车所在区域范围;
(5)由于每一个光源到达接收端的路径不同,因此在传输过程中的光强损耗也是不同的,那么也就是说在接收端会反映出不同的电压值;
(6)再根据电压值的大小排除相比较小的电压值的信号信息,最终确定当前状态下的位置信息;
【 ❗️基于能量损耗的位置估计
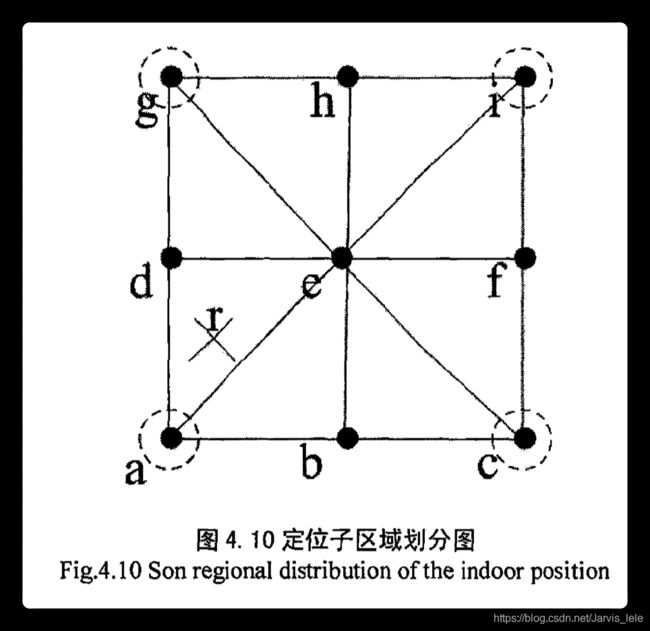
1️⃣ 将空间中的基本单元四棱柱空间进行细分成8个子区域,即将由四盏LRD光源组成的正方形区域细分成八个全等三角形区域,并分别对每个三角形区域进行标注,如上图所示。当光电探测器在正方形区域内移动的过程中,接收到的每盏LH)光源的光功率随着传输距离的不同自然也是不通的。每盏光源的垂直下方的a,c,g,i四点的光功率转换为电信号的电压值是最强的,随着位置的偏移光功率转换为电信号的强度也会逐渐衰减。
2️⃣ 当光电探测器处于r位置时会接收到来自对应于a,c,i,g处的四盏光源的位置信息,因此系统将空间单元锁定在正四棱柱acig的空间内。然后系统会根据电信号能量强弱去除能量最弱的一路信息,在r处接收到的i处的能量是最弱,因此去除后可将目标范围锁定至三角形acg中,然后判断来自g点和c点的电压能量大小,g点的电压能量要大于c点,所以排除掉c路信息,系统进而将目标位置锁定在三角形aeg中,同样原理判定来自a点和g点的能量大小,结果是a点高于g点,所以排除来自g点的信息,系统最终将目标位置锁定在三角形aed中,此时系统会自动将探测器的位置定义为三角形aed的重心处。
3️⃣ 当光电探测器在正四棱柱空间内接收平面的特殊位置b,f,d,h和e处时,系统首先对收到的四组电信号进行判别时,出现两组电信号较强,另两组相对较弱的情况时,就会将目标位置估计在两组信号相对较强的光源中心位置处,如果四组信号的强度均相差无几,则目标位置就会被估计在中心点e处。至此系统就会将判定的信息发送至上位机,通过上位机进行地图映射,完成定位功能。
】
(7)最后将确定的相对应 LED 灯发送的位置信息,显示于智能车主控制端的显示屏上,以便于实时观测测量结果。
- 采样信息
接受信号强度(Received Signal Strength, RSS)、编码
基于以上分析,最终可采用标签定位法
⭕️ 可见光通信系统
整个系统由两部分组成,信号发射端和信号接收端。在信号发射
端,首先把信号源的信号发送给发射电路,再由发射电路经过调制、编码等处理过程后的信号耦合到 LED 上,最后 LED 发光将电信号转换为光信号,把信息发送出去。在信号接收端,光电探测器检测到的光信号经过接收电路的一系列处理后,再通过放大电路处理,最终得到初始的发送信息。

发射端
1. 编码方案
编码是指用数字信号承载数字或模拟数据。
参考文献:
3、基于标签技术的室内可见光定位系统研究
5、基于STM32-PWM调制的可见光通信系统设计
6、基于STM3-PWM的室内LED可见光通信系统研究
1️⃣ 基于UART串口通信的通信协议
单片机将待发送的一个字节数据存入缓存区,单片机会将这一字节的数据按一定波特率发出,接收端根据相同比特率接收数据。基于UART可以设计一个简单的通信协议,该数据帧将由若干个字节组成各个字节表示一定含义,通过这样的信道编码,可以保证数据的可靠性。
2️⃣ 基于脉宽调制的通信协议
不同的数据用不同宽度的脉冲波表示。
2. 调制方案(DAC)
调制是指用模拟信号承载数字或模拟数据
1️⃣ PWM调制技术
参考文献:
1、基于Arduino的PWM室内可见光定位系统设计
5、基于STM32-PWM调制的可见光通信系统设计
6、基于STM3-PWM的室内LED可见光通信系统研究
该设计光源发射机部分人利用Arduino处理器产生的PWM信号控制三盏LED灯依次以不同亮度快速循环闪烁,光源接收机部分利用放大滤波电路测得定位点光强,Arduino处理器处理光强数据,从而快速获得较为准确的定位点坐标。
脉冲宽度调制(PWM)方案。PwM调制的实现方法是把模拟信号与高频三角波信号进行比较,得到反映原始信号的占空比可变矩形波,该矩形波经驱动管缓冲后,推动白光发光管发射PwM波,白光接收管则接收PWM波。解调时,将白光接收管收到的信号放大整形后得到原始的PWM波,再经低通滤波器滤除高次谐波得到输入的模拟信号。该方案的优点是,调制与解调实现方便。
2️⃣ OOK调制技术
参考文献:
2、基于标签-ook的智能车室内可见光定位及避障
7、基于stm32的ook调制技术
3. 信道通信时序方案
1️⃣ 数字时分复用(TDM)
参考文献:
3、基于标签技术的室内可见光定位系统研究
1、信号复用方式
可见光通信发射端是用以发射坐标信息的 LED 光源,在多数可见光定位系统中,通过许多个定位信标传输的位置信息实现定位功能,因此在信号传递过程中,会发生复用的问题,选择一个合理复用方式显得尤其重要,下文将对几种常用方式进行叙述:
⭕️在定位区域内将不同的定位信标使用不同的频率发送定位信号称为频分复用。所有定位信标通过差异的频率带宽同时进行信号传输,频分复用技术规定总带宽多于每个定位信标所需子频带带宽的总和,接收端接收复合信号中每个定位信标发送的定位信号并全部解析出来,因此这种信道复用方式需要进行复杂的定位信号检测。
⭕️在定位区域内定位信标的信号在不同时间段发送方式称为时分复用。每个定位信标发送时间相同、间隔相同,在此期间中发送的定位信号占有全部通信频带,因此这种复位技术在传输定位信号的过程中使用较长周期,且所有定位信号都有长时间的延时,不适用于大范围布置定位信标。
作用: 为避免多盏光源在接收端发生接收混乱,系统采用时分复用的方式将坐标信息利用可见光通信发送至自由空间。
原理: 采用同一物理连接的不同时段来传输不同的信号,以时间作为信号分割的参量,故三路信号在时间轴上互不重叠,即给三路信号分配一个时间周期,以一定的频率传输单个信号,方法简单,易于实现。
实现方案: 对于发送端的控制电路来说,先让LED1发送100帧数据,然后对100帧数据进行A/D采样,将采样后的A/D值取平均,作为目标位置相对于LED1的光强值。同理,LED1发完数据帧之后,LED1便暂时不发数据帧,LED2与LED3依次类推再发100帧数据。
发送数据的帧结构如图1所示。
可以在发送端对STM32进行编程实现上述的帧结构发送。

⭕️在定位区域内用一组包含互相正交的码字的码组携带多路信号方式称为码分复用。定位信标在码组中选取不同的码型进行使用,全部定位信标以固定的码型传输型号,码分复用可以在相同的时间内使用同一频带传输定位信号,这种方式对整个信道频带使用率高,但对硬件要求较高,成本高。
⭕️在可见光定位系统中,若采取时分复用方式,每个定位信标的时延长,LED 光源会产生闪烁的现象,可见光通信优点是在兼顾照明的同时可以进行通信,因此不应该出现这种情形。如果使用码分复用方式,一方面提高了造价,另一方面现有大部分照明使用是白光 LED 光源,无法实现大范围铺设定位信标。从 LED 光源发射的可见光信号和检测信号难度方面考虑,定位信标信号复用方式的最佳选择是频分复用。
接收端
在信息接收端,根据同步头对各个LED灯的0FFH进行A/D采样后求平均,然后根据事先得到的距离A与光强A/D值x之间的关系得到目标位置距离3个圆心的R1、R2、和R3值。代入P点坐标之内,得到定位点坐标P,再进行音频信号的采集、放大、滤被,最后输出给功放电路进行选择播放。
4. 解调方案(ADC)
5. 滤波放大方案
6. 降噪方案
指纹-标签法:
建立多个场景下的标签指纹库,再通过神经网络训练得出最优的识别模型