离散系统的系统函数及系统的频率响应(2-8)
系统函数
定义为:系统单位抽样响应h(n)的z变换,记为H(z)

频率响应

因果稳定系统
1.稳定性:(由z变换分析稳定性)
线性移不变系统稳定的充要条件:h(n)满足绝对可和
即 ∑|h(n)|<∞
z变换H(z)的收敛域:满足 ∑|h(n)z-n|<∞ 的那些z
如果收敛域包含单位圆,则有∑|h(n)|<∞ ,即系统稳定。
反过来说,稳定系统的收敛域应包括单位圆 |z| =1。
2.因果性:(由z变换分析因果性)
LSI系统为因果系统的充要条件是单位抽样响应h(n)为因果序列,则其z变换H(z)的收敛域为 R-<|z|≤∞。
3.因果稳定系统的极点
收敛域 R-<|z|≤∞应包含单位圆 |z|=1,即系统函数收敛域至少为 1≤|z|≤∞;
也就是说,其全部极点(z平面上对应于H(z)的表达式=∞的点)必须在单位圆内。
系统函数与差分方程的关系
线性移不变系统常用差分方程表示:
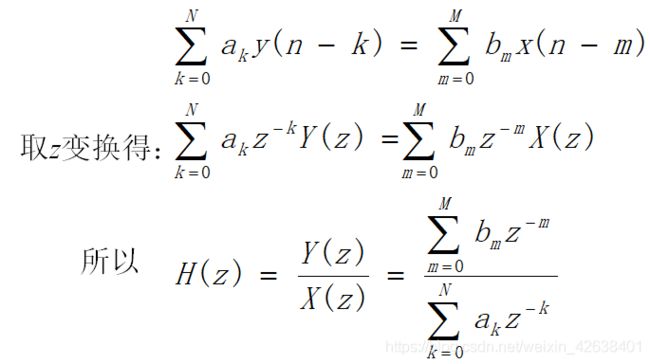
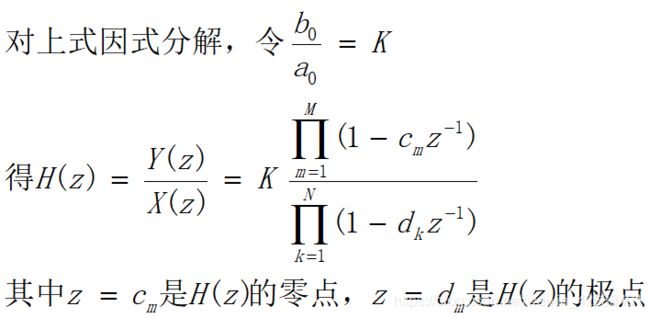
可见,除了比例常数K以外,系统函数完全由它的零点、极点决定
系统的频率响应的意义
系统的频率响应 
对于线性移不变系统:

输出序列的傅氏变换等于输入序列的傅氏变换与频率响应的乘积。

频率响应的几何确定
1.频率响应的零极点表达式

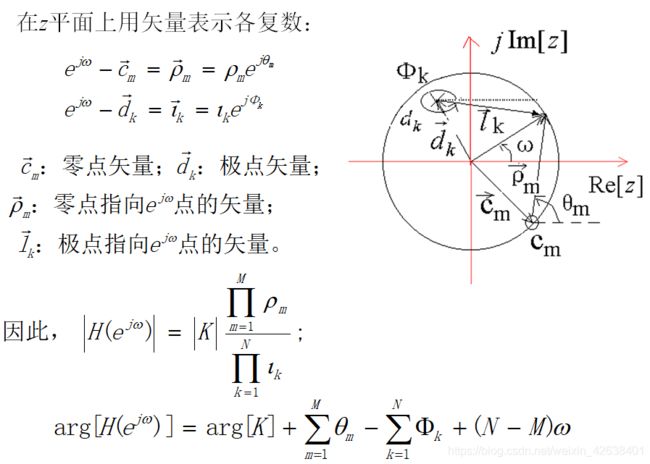
2.几点说明

(2) 单位圆附近的零点对幅度响应的谷点的位置与深度有明显影响,当零点位于单位圆上时,谷点为零。零点可在单位圆外。
(3) 单位圆附近的极点对幅度响应的峰点位置和高度有明显影响。极点在圆外,则系统不稳定。
IIR系统和FIR系统
1.无限长单位冲激响应(IIR)系统 Infinite-duration Impulse Response
定义:如果系统的单位抽样响应h(n)延伸到无穷长,即n→∞时,h(n)仍有值,则称作IIR系统。

2.有限长单位冲激响应(FIR)系统Finite-duration Impulse Response
定义: h(n)为有限长序列的系统。

从系统结构上说,FIR系统的输出是输入的组合运算,没有输出端到输入端的反馈,可以用“非递归”结构实现;
而IIR系统在求y(n)时需要用到以前的输出值y(n-k),因此在结构上有输出到输入的反馈,是“递归型”结构。
3.几个概念
FIR系统在有限z平面没有极点,称为全零点系统,也称为滑动平均 (moving average, MA)系统。
对于IIR系统,当系统函数

的分子项只有常数时,有限z平面上就只有极点,称为全极点系统,也称自回归(Autoregressive, AR)系统。
有限z平面上既有零点又有极点的系统,称为零极点系统,又称为自回归滑动平均(Autoregressive moving average,ARMA)系统。